
12 Flat Linear Permanent Magnet Synchronous Motors
By flat linear permanent magnet synchronous motors (F-LPMSM), we mean here single- or double-sided, short mover or long stator three-phase ac-fed primary and long (stator) or short (mover) secondary configurations, with sinusoidal or trapezoidal emf or current waveform control. Both distributed (q > 1) and tooth-wound three-phase windings in iron or air-core primaries are considered. The tubular linear PM motors (T-LPMSMs) are treated in a separate chapter as their design and control is related to the rather short travel length (below 2–3 m). Linear PM brushless motors with variable reluctance short (mover) or long (stator) secondary and PM primaries that contain both the PMs and three-phase ac windings will also be treated separately under the name of pulse linear PM brushless motors (P-LPMBM).
The F-LPMSM may be applied, in the long iron-core primary (stator) and short PM mover configuration, for industrial urban and interurban transportation. Short (mover) primary and long PM-secondary (stator) F-LPMSM configurations are used in short travel (a few meters) both in single-sided versions (as MAGLEV carriers, especially) and in double-sided PM-secondary (tube) versions, when the normal force on the short primary (mover) is to be zero, in order to avoid noise, vibration, and large stray PM magnetic fields.
In what follows, we will first discuss practical topologies, analytical (technical) and finite element method (FEM) field theories for F-LPMSMs, cogging force computation and reduction, circuit parameters, and circuit models for dynamic and field oriented control (FOC) and direct thrust and flux control (DTFC); then a design methodology is introduced by numerical example.
12.1 A Few Practical Topologies
Though there are many “novel” topologies for F-LPSM, only a few are representative and practical:
Single-sided type (Figure 12.1a,b, and d)
Double-sided type (Figure 12.1c and f)
Short PM secondary (mover) type (Figure 12.1a and d)
Short ac primary (mover) type (Figure 12.1c,e,f, and g)
Distributed (q = 1 slot/pole/phase) three-phase ac winding (Figure 12.1a through d)
Concentrated (tooth-wound) three-phase winding (Figure 12.1e,f, and g)
Iron-tooth primary core (Figure 12.1a through f)
Air-core primary (three-phase) (Figure 12.1c)
With surface PM secondary (Figure 12.1a,c through g)
With Halbach array PMs secondary (Figure 12.1b)
With four sides (Figure 12.1g)
An investigation of these configurations reveals the following:
The cable-coil q = 1, single layer, three-phase winding (Figure 12.1a and d) is easy to install along track, with a fixed primary (stator), but it requires open slots, and thus the airgap should be about the size of the slot openings (or less) to allow small emf harmonics and low enough cogging force. The configuration would be typical for urban or interurban MAGLEVs with an active guideway (airgap from 6 to 10 mm).
The Halbach PM array secondary (Figure 12.1b) leads to less emf ripple, higher thrust and lower cogging (zero current) force, and thinner secondary back core; it may be used with both PM mover or mild length (travel) PM stator.
The double-sided PM-secondary stator with air-core primary (mover) is typical for industrial linear motor automation when the cogging force has to be small (less than 1%), and the stray PM fields still have to be limited.
The hybrid PM + dc coil secondary mover configuration (Figure 12.1d) is typical for active guideway (primary) MAGLEVs.
The single-sided 6 slot/8 PM pole configuration (Figure 12.1e) is just an example of tooth-wound three-phase winding; to reduce cogging force, the PM span per pole pitch is around 0.6 (very close to teeth shoe span).
The double-sided primary and secondary configuration in Figure 12.1f provides for ideally zero normal force on dual PM-secondary mover; the two rows of PMs are shifted to reduce cogging force; the 12/16 pole module combination is used to mitigate between reasonably low cogging force and low iron losses, with reasonably low inductance for generator operation mode. 12/14 (in general, NS − 2p = ±2k) configurations reduce further cogging force but, due to larger mmf harmonics, they lead to larger core losses in the primary and secondary under load and show a larger synchronous inductance.
The four-sided configuration in Figure 12.1g is close to a tubular structure (due to quasi-circular ac winding coils), but it retains the regular structure of the laminated stack of primary; the small displacement of the four PM rows leads to a small cogging force. For wave energy generators, tooth-wound single-layer windings with quasi-circular coils may lead to small pole pitches (the speed is around 1 m/s and the power in hundreds of kW), which allow for hopefully acceptable thrust density (in N/kg) and efficiency; this is yet to be proved.

FIGURE 12.1 A few practical F-LPMSMs topologies (a) with q = 1 slot/pole/phase winding primary and radially surface PMs, (b) radial+ axial (Halbach) PM secondary, (c) double-sided F-LPMSM with hybrid PM+ dc coil secondary for flux weakening or levitation control, (e) single-sided F-LPMSM with tooth-wound three phase winding (6 slot/8 pole), (f) double-sided PM secondary with shifted PMs F-LPMSM (12 slot/16 pole), (g) four sided configuration with quasi-circular coils Gramme winding.
In what follows, we will deal with the field theory of F-LPMSMs first by an analytical multilayer model, then by the magnetic circuit model, and finally with FEM (through results, mainly).
12.2 Multilayer Field Model of Iron-Core F-LPMSMs with Sinusoidal EMFS and Currents
Let us consider a single-sided F-LPMSM with iron-core primary and investigate the PM and armature-reaction airgap fields and forces (Figure 12.2). To simplify the calculations, we replace the slots/teeth area by a nonslotted area, but the magnetic permeability is different along the two axes x (longitudinal) and y (vertical) [1,2]:
μx=μ0⋅μr1+(b/τs)(μr−1)(12.1)
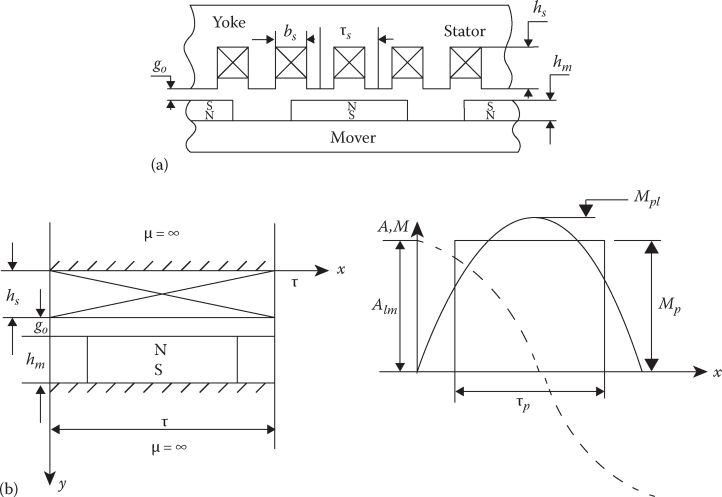
FIGURE 12.2 Single-sided F-LPMSM with iron-core primary (a) actual structure and (b) model for analysis.
μx=[bsτs+μr(1−bsτs)](12.2)
where
μr is the average magnetic permeability in the primary teeth
bs is the slot width
τs is the slot pitch
A multilayer structure (Figure 12.3) is thus obtained. There are three main layers and the PM layer. The armature structure equivalent mmfs are represented by their space fundamentals distributed ac windings (q = 1, 2), placed at random heights in their layers. The regions (II + III’), containing the PMs, are isotropic (μx=μy ≈ μ0); iron regions are infinitely permeable. The fundamentals of PM magnetization MvPM harmonics are (in PM-secondary coordinates) as follows:
MvPM=4πv2MPMsinv2π⋅τpτsin v2πτx;MPM=HC⋅hm;v=1,2…(12.3)
where
HC is the coercive field of PMs
hm is the PM depth
Its current sheet AvPM = ∂MvPM/∂x, where τp is the PM span/pole and τ is the pole pitch of both primary and secondary. The armature-reaction mmf fundamental and harmonics in PM-secondary coordinates would be
Avs=Av smcos(vπxτ+γ0)(12.4)
Av sm=3√2πτkWvW1Iv-for distributed windings(12.5)
where kWv is the winding factor.
For tooth-wound windings, Avsm has many large (sub and super) space harmonics around the fundamental. A full derivation of field equations with boundary conditions is presented in [1,2] for the layers I′ + I′, II, and III+III′. In Ref. [1], it was shown that the heights ym and ys, where the equivalent PM and armature mmfs, within the layer depth, are placed, are not important.
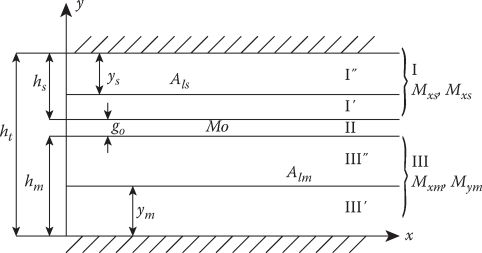
FIGURE 12.3 Multilayer model.
Finally, for the fundamental PM flux density ByPM1 in the airgap
Ev=√2πω1⋅kWv⋅τ⋅lstack⋅(Byav)av;v=1for the fundamental(12.6)
(For the air-core machine, this flux density has to be calculated as an average along the air-core coil height.) The airgap inductance Lm is thus
Lmv=√2πIkWv.τv⋅lstack⋅(Byav;)v=1for the fundamental(12.7)
The airgap space harmonics (Lm)v>1 are considered as leakage inductances and added to give the total synchronous cyclic inductance. For bs/τs=0.53, hs = 35 mm, τ = 114.3 mm, τp/τ = 0.67, μrel=400, g = 2 mm, hm=6.35 mm, Br = 0.86 T, HC = 0.7 MA/m, and lstack = 101.6 mm, the normal airgap flux density was calculated as mentioned earlier, measured and verified by 2D FEM for zero current and for pure Iq current (γ = π/2) as in Figure 12.4a and b [1].
Satisfactory fundamental value agreement between the analytical model and FEM is obtained while FEM fits well the Hall-probe measurements of airgap flux density. A full analytical field theory may be developed by also considering the slot openings. In addition to our isotropic slot-teeth area with μx ≠ μy, which, in fact, accounts for mmf step-like distribution due to slots and allows to use the concept of current sheet by [3]

FIGURE 12.4 Airgap flux density (a) by PMs, (b) of primary mmf, (c) thrust, and (d) normal force.
ByPMv(x)=(ByPMv)slotless⋅Pg(x);∂ByPMv(x,y)∂y+∂BxPMv(x,y)∂x=0(12.8)
Bav(x)=(Byv)slotless⋅Pg(x)(12.9)
where Pg is the inverse per-unit airgap (or airgap) permeance function (Figure 12.5), which may be described rather precisely by conformal mapping; other simplified curve fitting is feasible.
To this scope the theory for rotary brushless dc motors [4,5] may be adopted for F-LPMSMs. In a simplified method, force at zero current Fcog may be calculated analytically by adding the forces on the primary open slot walls (Figure 12.6):
Fcog≈lstack2μ0Ns∑n=1∞∑v=1B 2xPMv(v⋅2πnNS+θ1)(gα⋅ssg)(12.10)
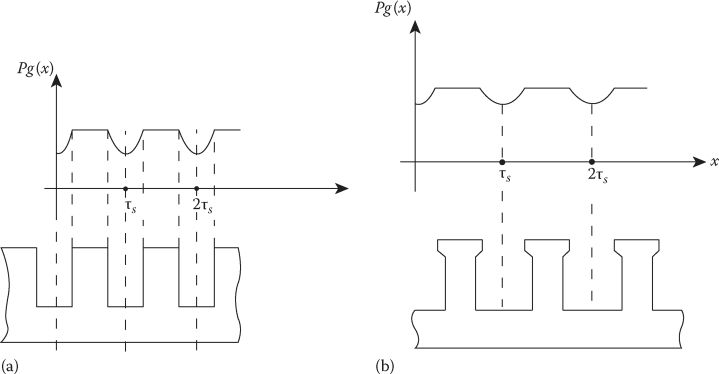
FIGURE 12.5 Inverse airgap function (a) for open slots and (b) for semiclosed slots.

FIGURE 12.6 Slot flux ideal path.
where
gα=0 and ssg=0 outside slots openings
gα=w1+g and ssg = 1 for left side of slots
gα=w2+g and ssg=-1 for the right side of slots
NS is the number of primary slots
lstack is the primary stack length
θ1 is the angle of slot center with respect to PM axis
BxPMv is obtained from (12.8)
Now the thrust may be calculated directly from the analytical field theory:
Fx=lstack∞∑v=12pτ∫0ByPmv(x)Asv(x)dx(12.11)
Fy≈lstack2μ0∞∑v=1[2pτ∫0[ByPMv(x)+Bav(x)]2dx+22pτ∫0[(ByPMv(x)+Bav(x))]⋅dx](12.12)
A comparison between calculated and measured forces (Figure 12.4c and d) shows satisfactory agreement [2]. An analytical multilayer theory may be used even for the Halbach PM array secondary (Figure 12.7) air-core F-LPMSM [6].
In this case, the PM magnetization has two components Mxn and Mzn (Figure 12.7). The PM flux linkage ψa per phase is [6]
ΨPM=wn0pm∞∑n=−∞,odd1jkmγm(jμ0Mxnkm+μ0γnMzn) ×(1−e−γnΔ)(e−jπn3−1)(1−e−γnΓ)×e−γnx0ejknx0(12.13)
ψa=4μ0wPsn0τ3J0∞∑n=−∞,odd1(nπ)4(1−cosπ3n)(Γ+e−γnΓ−1γn)(12.14)
E=dψPMdz⋅U;U=πτω1;Lm=ψaI(12.15)
where, say, μ0M0 = 1.1 T, n0 = 1.47 × 106 turns/m2 (WC = 150 turns/coil), J0 is the current density of the coils for phase current I, kn=2πn/2τ, where n is the mmf space harmonics order, γn=|kn|, x0=5 mm, τ = 51 mm, Γ=6 mm, Δ=25.5 mm, “stack” length w = 25.5 mm; the Halbach array contains pm=4 + 1/2 pitches; the pole pairs of one-phase coil ps=7. In Figure 12.7b, a good agreement between theory and experiments is proven [6].
Therefore, apparently, the analytical multilayer theory seems self-sufficient and easy to use for optimization design attempts, after preliminary design with key 2(3) D-FEM corrections.
Accounting for slot openings (and slotting in general) with magnetic saturation consideration requires the magnetic circuit method [4.7], besides 2(3) D-FEM.
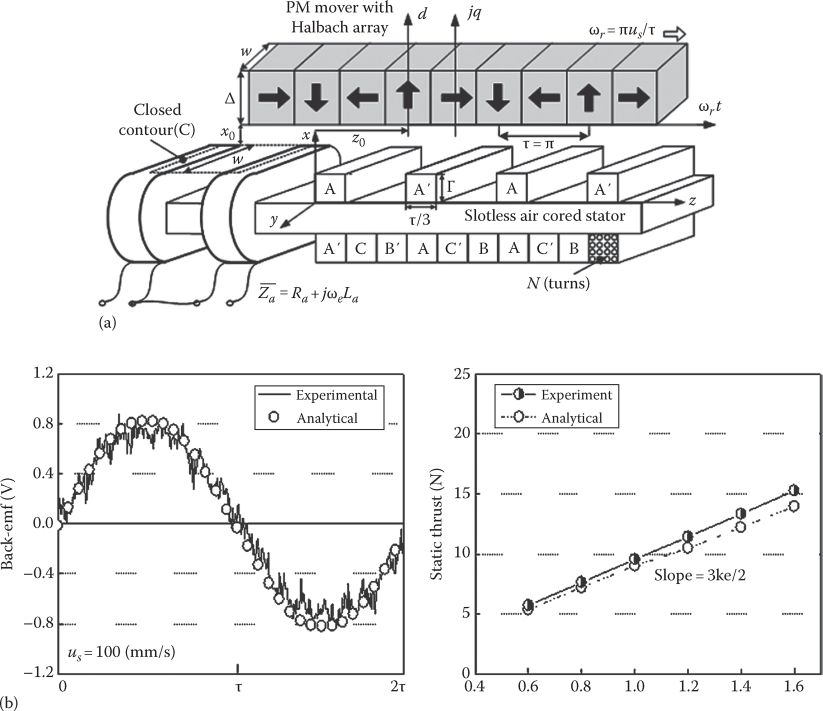
FIGURE 12.7 Air-core F-LPMSM with Halbach PM array secondary (a) emf and thrust versus iq current (b). (After Trumper, D.L. et al., IEEE Trans., IA-32(2), 371, 1996.)
12.3 Magnetic Equivalent Circuit (Mec) Theory of Iron-Core F-LPMSM
Calculating the airgap flux density distribution accounting for slot openings (in open slot magnetic cores), the actual distribution of windings in slots and magnetic saturation, within a limited computation effort means, according to the MEC method, to use realistic flux tubes and define their reluctance dependence of F-LPMSM geometry, mover position, and magnetic saturation, slot by slot and tooth by tooth (Figure 12.8), all assembled in a complete MEC (magnetostatic) model, to be solved by algebraic methods. In a flux tube, the flux density is considered uniform; this idea leads to the level of complexity (number of flux tubes—reluctances of MEC).
The structure of the MEC has to be fixed during motion, to secure limited computation effort. A two PM pole structure with its primary section of MEC is shown in Figure 12.8 [7].
A bi-section for airgap and yet another one for the PM secondary are added [7]. Also visible in Figure 12.8b are the longitudinal leakage reluctances Rgz, “attached” to primary (to the middle of the airgap); they are constant; only the tooth reluctance Rt varies due to magnetic saturation. The other side of airgap MEC (Figure 12.9) contains the reluctances Rmg1, Rmg2, and Rmg3, which vary with primary position (motion). The MEC of the 2-pole secondary (Figure 12.9b) is rather straightforward.
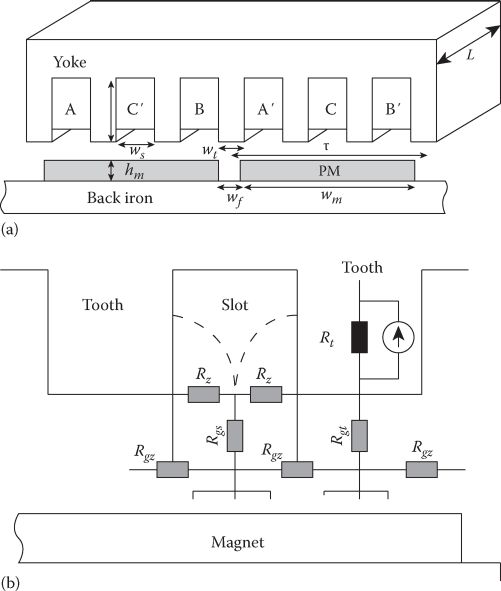
FIGURE 12.8 Iron-core F-LPMSM geometry (a) and elementary MEC, (b). (After Sheikh-Ghalavand, B. et al., IEEE Trans, MAG-46(1), 112, 2010.)
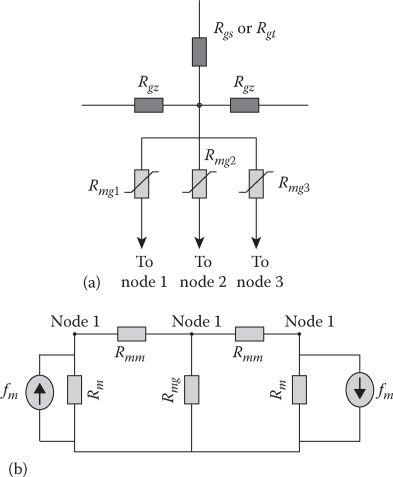
FIGURE 12.9 Airgap secondary MEC (a) and PM-secondary MEC (b). (After Sheikh-Ghalavand, B. et al., IEEE Trans,, MAG-46(1), 112, 2010.)
The magnetic reluctances of the entire MEC are defined by using Ampere’s law. Finally, the complete MEC of the 2 PM pole secondary iron-core F-LPMSM is shown in Figure 12.10 [7].
A typical result, related to flux density in the middle of the teeth in saturated conditions and shown in Figure 12.11, indicates quite good agreement with FEM. This good agreement is valid also for thrust, and it may be used to develop a reliable iron-core loss model, by assuming a linear variation in time of flux density in primary teeth and yoke as in Figure 12.12.
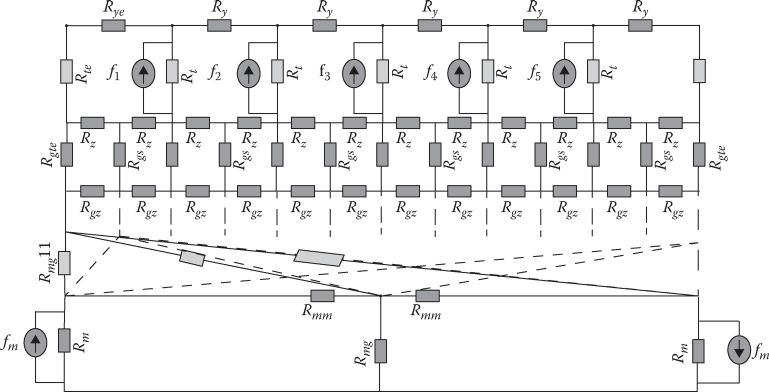
FIGURE 12.10 Complete MEC model of 2-pole PM-secondary F-LPMSM. (After Sheikh-Ghalavand, B. et al., IEEE Trans, MAG-46(1), 112, 2010.)
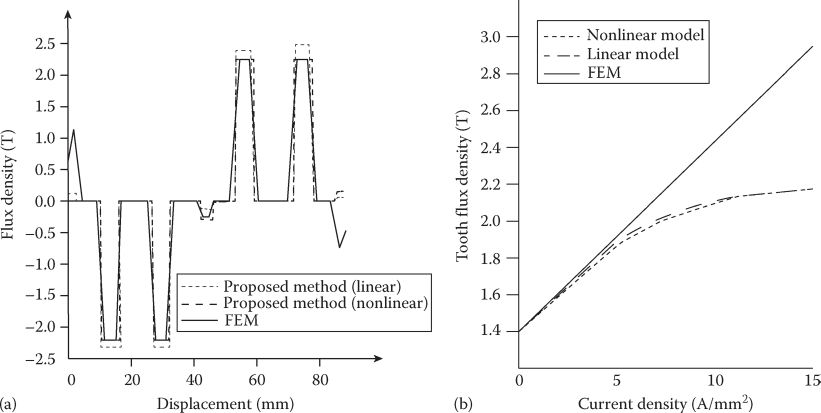
FIGURE 12.11 Flux density in the middle of the teeth (a) and flux density in tooth 2 versus primary current density, (b). (After Sheikh-Ghalavand, B. et al., IEEE Trans, MAG-46(1), 112, 2010.)
Traditionally, the primary core losses are separated into two terms: the hysteresis losses ph and eddy current losses peddy.
piron=ph+peddy=kh⋅Bαmax(f150)+ke⋅B2max(f150)2W/m3(12.16)
where
α=1.8-2.2
kh and ke are core losses per m3 of laminated core at 1 T and 50 Hz
As (12.16) is valid for sinusoidal flux density-time variation, it gives large errors for waveforms as in Figure 12.12 and thus
peddy=2keTT∫0(dB(t)dt)2dt(W/m3)(12.17)
Btmax and Bymax are calculated by the MEC method or by FEM. The total eddy current losses for the waveforms in Figure 12.12 are
pe≈12q1kekcl(UτBtmax)2Vteeth+8q1kekclτWm(UτBymax)2Vyoke(W)(12.18)
with
Wm is the PM span per pole
kd = 1.1−1.2 accounts for longitudinal eddy currents in the core
q1 is slots/pole/phase
The PM-secondary losses, due to slot openings and primary mmf space harmonics fields, have not been considered here. Results from FEM and MEC indicate a total relative error below 5% in total primary core losses [7].
Note: The tooth-wound primary exhibits a rich content of mmf space harmonics, but the MEC method can also be used for it. Finally, the current-time particular variations end up in flux density—time variations, and sufficiently small time periods may handle the situation. Ultimately, perhaps, only FEM can produce reliable enough results for total core losses during steady state and transients, accounting for both space harmonics and time harmonics.
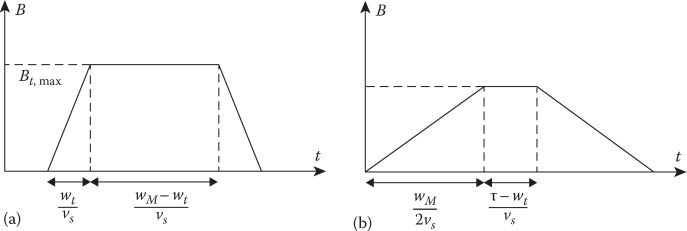
FIGURE 12.12 Ideal (linear) time variation of flux density in primary teeth (a) and yoke (b). (After Sheikh-Ghalavand, B. et al., IEEE Trans., MAG-46(1), 112, 2010.)
12.4 Analytical Multilayer Field Theory of Air-Core F-LPMSM
The multilayer field theory of air-core F-LPMSM (Figure 12.13a) may be approached with the same method as in Section 12.2, with the simplification that the slot zone is the ac coils zone and μ=μ0. To add more generality to the model, the case of rectangular current control is considered (Figure 12.13b) [8].
The PM magnetization M(x) is decomposed in Fourier series:
M(x)=4πBrμ0∞∑v=112v−1sin(2v−1)π2τpτsin(2v−1)πτhm× ×exp[−(2v−1)πτy]sin(2v−1)πτx(12.19)
The final BxI, ByI, PM flux density components in region I [8], are
Bxl(x,y)=4Brπ∞∑v=112v−1sin(2v−1)π2τpτsinh(2v−1)πτhm×exp(−(2v−1)πτy)⋅sin(2v−1)πτxBxl(x,y)=4Brπ∞∑v=112v−1sin(2v−1)π2τpτsinh(2v−1)πτhm×exp(−(2v−1)πτy)⋅cos(2v−1)πτx(12.20)
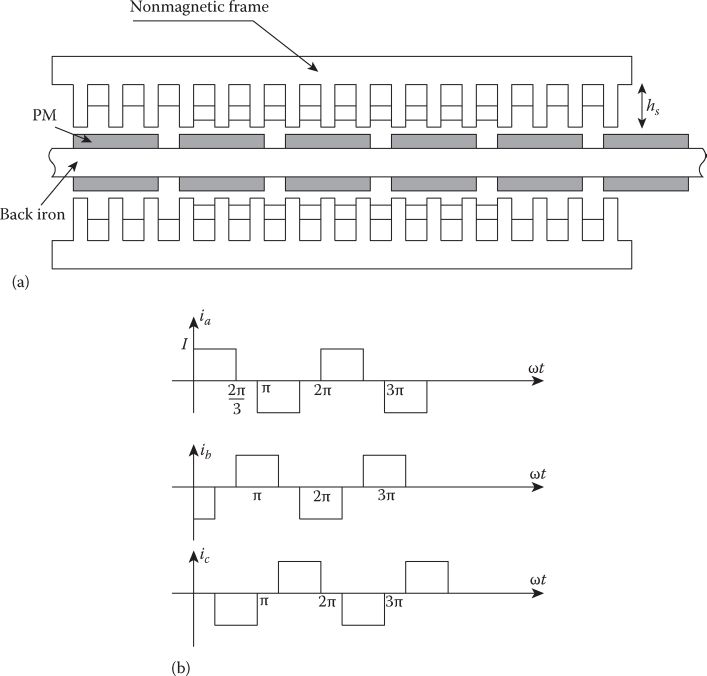
FIGURE 12.13 Double-sided air-core F-LPMSM, (a) and its ideal (rectangular) phase currents, (b).
BxI and ByI are dependent on Br, τP/τ, hm/τ, and they decay along Oy (airgap and winding depth). The fundamental components decay e times along τ/π airgap depth. To secure a good interaction between PM field and the primary air-core winding, the latter’s depth hs should be smaller than τ/π; so larger pole pitch allows deeper windings. In a rectangular, current-controlled F-LPMSM, the two active phase mmf angle shifts with respect to PM flux density axis from 60° to 120° electrical degrees (Figure 12.14).
Using the Lorenz force formula, the thrust Fx and normal force Fy force (on primary side) are
Fx(t)=64⋅ncI⋅lstackws∞∑v=1Cvcos(2v−1)π6[cos(2v−1)(πτU⋅t−π6)]Fx(t)=64⋅ncI⋅lstackws∞∑v=1Cvsin(2v−1)π6[cos(2v−1)(πτU⋅t−π6)](12.21)

FIGURE 12.14 Primary mmf angle PM axis; from 60° to 120° for rectangular current control (a) and Fx, Fy forces (b) for the data in Table 12.1.
TABLE 12.1
Air-Core F-LPMSM Data

with
Cυ=4Brτ2π3hs(2v−1)3sin(2v−1)π2τpτsinh(2v−1)π2hmexp[−(2v−1)πτhm] ×[1−exp(−(2v−1)(hs+g)πτ)sin(2v−1)πhs2g](12.22)
In (12.21) and (12.22), lstack is the “stack” or active depth of primary and secondary (PM). Plots of forces in Figure 12.14 correspond to the data in Table 12.1, over a 60° electrical degree interval, when phases A + B are active and show notable variations. Fx variations are important and they may be further reduced by varying PM span ratio τp/τ, hS/τ, g/τ, or even the PM shape and WS/τS ratio. The total normal force on the PM secondary is practically zero, or small, for zero eccentricity. (Fy in Figure 12.14 is related to one primary side.)
The 3D aspect of the field is not considered but it could be added, by an additional decomposition in Fourier series along z (lstack) direction. A 3D-FEM would yield even better results but for a much larger computation effort. The emfs for the three phases ea,b,c are
ea,b,c=∑CnUcos(πτUt+γ0−(i−1)2π3);i=1,2,3(12.23)
So the thrust may also be written as
Fx=1U(eaia+ebib+ecic)(12.24)
For q = 1 (3 slots/pole), the phase self and mutual inductances Laa and Lab may be approximated as [9]
Laa=Lsl+μ0W21τ⋅lstack(1+kfringe)p(g+hm)(12.25)
Lab=−Laa−Lsl3;Lsl−leakage inductance(12.26)
The fringing coefficient kfringe > 0 accounts for longitudinal flux density and transverse (3D) field components; kfringe may be calculated from the multilayer theory (in 3D form), from 3D-FEM or from current decay measurements at standstill.
Before approaching the circuit model of F-LPMSMs, required for performance evaluation and for dynamics and control design, let us first focus a little on the cogging force and its particular end effect in F-LPMSMs.
12.5 Cogging Force and Longitudinal End Effects
The cogging (zero current), or detent, force is the result of the variation of the coenergy stored in the PMs due to the iron-core slot openings. It is a periodic function that, for rotary PMSMs, has the period of LCM (Ns, 2p), where Ns is the number of rotor poles:
LCM(Ns,2p)=NsGCD(Ns,2p)(12.27)
GCD is the largest common divisor.
For L-PMSM, 2pτ in the secondary should be considered to correspond to NSτs in the primary (τs is the slot pitch). For tooth-wound windings, LCM becomes larger than for distributed windings (even with q1 = 1 slot/pole/phase) and, consequently, the cogging force gets smaller.
Two tooth-wound F-LPMSMs situations, which correspond to 9 slots/12 poles and 10 slots/9 poles, are shown in Figure 12.15.
The configuration with 10 slots and 9 poles is somewhat unusual as it still hosts 3 × 3 phase coils, but it is used purposely to drastically reduce the cogging force. As LCM (9, 12) is 36 and LCM (9, 10) is 90, a high number of cogging force periods is expected. With the latter solution and in the form of 10 slots and 9 PM poles per module length, the periodicity of cogging force is even higher (in the ratio of 10/3 and not 10/4) [10]:
F9/12(x)=9∑A3nsin(3nπτx+α3n)F10/9(x)=10∑A10nsin(10nπτx+α10n)(12.28)
The results in Figure 12.16 show that even if the peak cogging force of each slot is about the same in both cases, their phase shift is such that the total cogging force for the 10 slot/9 pole F-LPMSM is almost zero [10]. Even a single slot cogging force, if uncompensated, can lead to a large cogging force. This may be called the end effect in cogging force. A typical 9 slot/8 pole combination would show it.

FIGURE 12.15 Two tooth-wound F-LPMSMs: (a) 9/12. (b) 10/9. (After Baatar, N. et al., IEEE Trans., MAG-45(10), 4562, 2009.)

FIGURE 12.16 Cogging force: (a) for 9 slots/12 poles, (b) for 10 slots/9 poles. (After Baatar, N. et al., IEEE Trans, MAG-45(10), 4562, 2009.)
Apart from slot pitch PM to pole pitch ratio, primary shape optimization may be used to reduce the drag force due to primary (or PM secondary) finite length, especially in short-length modules. Chamfering and widening the end tooth is a way to do it (Figure 12.17)
The question is if these methods that reduce the cogging (and drag) force will not impede on average total thrust; not so for the aforementioned configuration (10 slots/9 poles) and chamfered end teeth of primary [10]. Now that the principle of cogging force occurrence is elucidated, let us remember that all methods to reduce cogging torque in rotary PMSMs may be applied for LPMSMs, to reduce the cogging force. Among them we enumerate here
Optimization of PM span τp per pole pitch τ [11]
Pole displacement (in pairs), slot opening optimization
Making a PM pole of a few sectors as in PWM signals [12] with notable average thrust reduction
Simple (or double) skewing [13], with notable average thrust reduction
PM shaping (bread loaf shape) for sinusoidal emf
Double sided topology for zero normal force [14]
Current waveform shaping
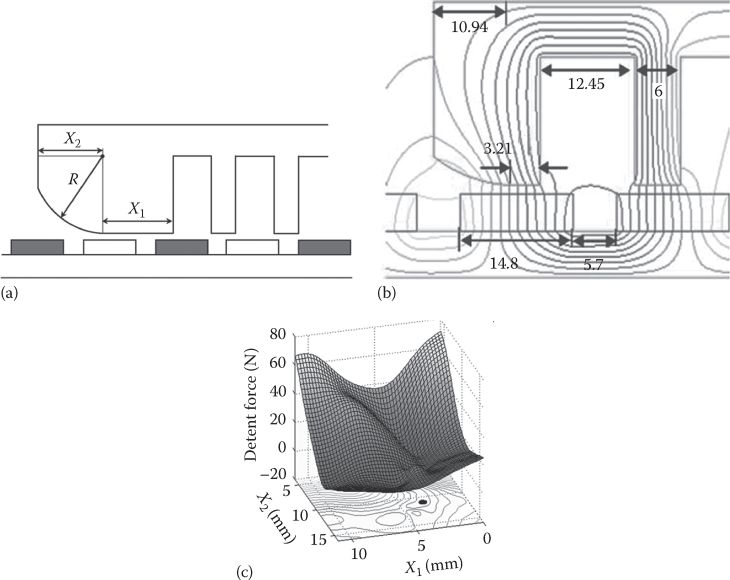
FIGURE 12.17 Drag force due to finite primary length at zero current: (a) variables X1, X2, (b) final geometry, and (c) drag force. (After Baatar, N. et al., IEEE Trans., MAG-45(10), 4562, 2009.)
12.5.1 End Effects in 2(4) Pole PM-Secondary F-LPMSMs
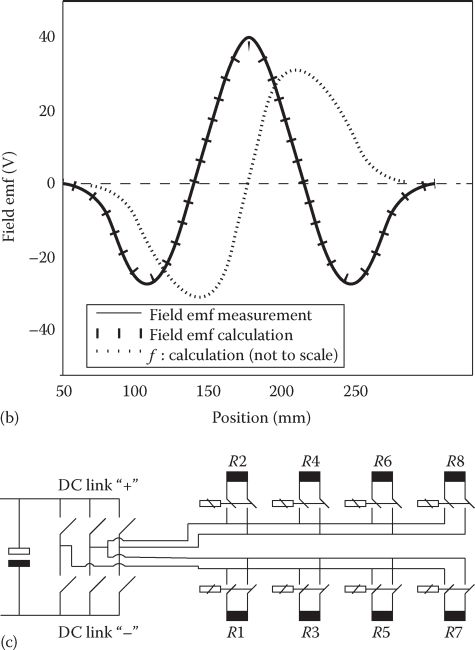
In some applications where, say, short length PM movers are required, a 2-pole short PM secondary may be adopted while the long primary is the stator, supplied in sections to keep the copper losses low. In such a configuration (Figure 12.18), with air-core windings, two phase (rather than three-phase) ac windings are used (to avoid nonbalanced phase current due to non-equal self and mutual inductances) [15]. The PM flux per one stator coil versus mover position (Figure 12.18b) shows that the emf in the coil has one full-scale positive and two half-scale negative peak values. To smooth the total thrust, two coils in series have to be connected for the negative polarity of emf, according to mover position [15]. This change in coil connection needs a special power electronics system, to feed the long stator sequentially (Figure 12.18).
The usage of 2(4) pole PM mover is to be avoided whenever possible as it creates problems in the switching of the active stator windings section after section. In any case, 3D-FEM is to be used to analyze such topologies with air core (or with iron core).

FIGURE 12.18 Two-pole PM mover air-core F-LPMSM (a). The emf coil vs. mover position, (b) converter plus coil switches for one stator phase (there are two phases in all) (c). (After Henneberger, G. and Reuber, C., A linear synchronous motor for a clean room system, Record of LDIA-1995, Nagasaki, Japan, pp. 227–230, 1995.)
12.6 dq Model of F-LPMSM With Sinusoidal EMF
As seen earlier in this chapter, proper design may lead to rather sinusoidal emfs in the 3(2) phases of primary of F-LPMSMs. If we further treat the cogging force (the force at zero current) as a disturbance (load) force, then we may apply safely the dq model; for tooth-wound primaries, this model reflects the action of mmf fundamental as for distributed-winding primaries.
Thrust pulsations due to space harmonics consequences in emf or mmf are not considered in the standard dq model of electric machinery. Despite the approximation, the dq model is widely used to assess basic steady-state and dynamic performance of F-LPMSMs. The dq model also provides the ideal tool for the design of position, speed, or thrust (and normal force, eventually) control via FOC or DTFC.
So far we inferred that only surface PM secondaries are practical for F-LPMSM, but, for the sake of generality, different d−q inductances Ld and Lq are considered in the dq model. This is the case in mixed (PM + dc controlled coils) excitation secondary with long active stator MAGLEVs with buried PMs on mover, to leave room for the addition of slots to host an ac two-phase generator on board the mover, based on stator mmf space harmonics field (q1 = 1), Figure 12.19 (Ld < Lq). The role of PMs in Figure 12.19b is quite different [16]: they are placed along axis q in multiple flux barriers and the dc coils in axis d (Ld > Lq). The PMs serve for wide constant power speed range and for operation at unity power factor (minimum converter kVA).

FIGURE 12.19 PM-hybrid secondary (mover) and active stator F-LPMSM (a) with PM + dc coils in axis d and (b) dual-axis-field linear BEGA. (After Boldea, I. and Tutelea, L., Electric Machines: Steady State, Transients and Design with Matlab, CRC Press, Taylor & Francis, New York, 2009.)
To a first approximation, the magnetization inductances Lmd and Lmq in Figure 12.19 are (as for its rotary machine counterparts) [17] as follows:
Ldm=Lm⋅kdm1+ksd;Lqm=Lm⋅kqm1+ksq(12.29)
kdm=(τpτ+1πsinτpτπ)⋅gg+hPMτ2lPM(12.30)
kdm=τpτ−1πsinτpτπ+23πcosτpτπ2(12.31)
Lm=6μ0(kW1W1p)τ⋅lstackπ2p⋅g⋅kC(12.32)
For a long stator, Lmd and Lmq refer only to the stator part covered by the PM-hybrid secondary. For the rest of “open” stator, the inductance, treated as a leakage inductance Lp’−p, is
Lp′−p≈Ltp′−p+6μ0(kW1W1p′)2τ⋅lstackπ2(p′−p)τπ Ld=Ldm+Llp+Lp′−p;Lq=Lqm+Llp+Lp′−p(12.33)
The total number of pole pairs per energized section is p′ (p -c p’) out of which p of them correspond to active part (in interaction with the mover); the airgap of the open stator part of section is considered τ/π as it would result from a 2D analytical field solution. For linear BEGA [16], the expressions of parameters are similar to those of rotary PM assisted reluctance synchronous motors.
For a short primary, Ld and Lq would be simply (for 2p-poles)
Ld=Lls+Ldm;Lq=Lls+Lqm;Lls−leakage inductance(12.34)
The resistance/phase formula will be given in the forthcoming design paragraph. So, in PM-secondary dq coordinates, Figure 12.19, the dq model of F-LPMSMs writes
ˉVS=RSˉIS+dˉψSdt+jπτUk⋅ˉψS;ˉψS=LdId+ψPM+jLqIq(12.35)
ˉVS=Vd+jVq;ˉIS=Id+jIq;Fx=32πτ[ψPMd+(Ld−Lq)Id](Iqk)(12.36)
k = 1 for PM-secondary mover and k=−1 for primary mover.
The motion equations are
GvdUdt=Fx−Fload−Fcogg(x);dxdt=U(12.37)
GmdUgdt=Fn−Gm⋅g−Fdis;dgdt=Ug;γ=tan−1(IdIq)(12.38)
F≈(B 2PMg+B 2ag+2BPMg⋅Bag⋅sinγ)2μ02p⋅τ⋅lstack2(12.39)
BpM, Bag are PM and armature airgap flux density fundamentals.
Ug is the vertical speed in case the airgap varies (due to track irregularities or during levitation control). The Park transformation completes the system:
|VdVqV0|=23|cos(−πτx)cos(−πτx+2π3)cos(−πτx−2π3)sin(−πτx)sin(−πτx+2π3)sin(−πτx−2π3) 12 12 12||VaVbVc|(12.40)
Given the phase voltages Va(t), Vb(t), Vc(t), the initial values of variables (Id0, Iq0, U0, X0, Ug0, g0) and force perturbations (Fcogg(x) and Fdis(x)), and the load force Fload, together with machine parameters values, the dq model equations may be solved numerically for any steady-state or transient operation mode, with constant or variable airgap g. However, for propulsion control purposes, a few typical control law steady-state characteristics are worthy of discussion. Before that, the equivalent circuits for transients and the structural diagram are given for completeness. Adding the primary and secondary core loss via equivalent resistances (Rpcore, Rscore), the dq model equations at constant speed, U = const., and constant airgap, g = const., yield the equivalent circuits in Figure 12.20. They are similar to those of rotary IPMSMs. The structural diagram in Figure 12.21 is valid for propulsion only (constant airgap).
The space phasor diagrams for motoring and generating are similar to those of rotary PMSMs [17].
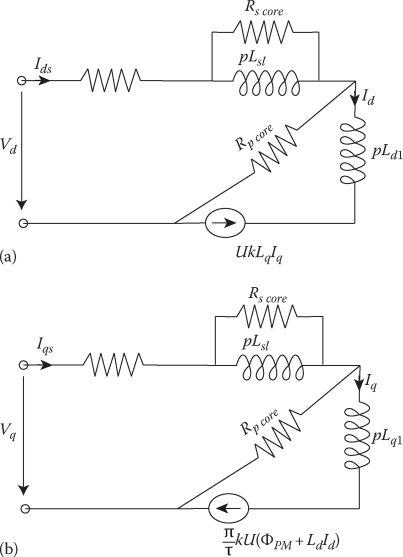
FIGURE 12.20 Equivalent circuits: (a) axis d and (b) axis q.

FIGURE 12.21 F-LPMSM structural diagram for propulsion only.
12.7 Steady-State Characteristics for Typical Control Strategies
There are quite a few control strategies of practical interest for F-LPMSMs. We select here two ol them:
Maximum thrust/current control
Flux weakening control
12.7.1 Maximum Thrust per Current Characteristics (Ld = Lq = Ls)
Core losses are neglected for simplicity:
So, from (12.33) and (12.34), for surface PM-secondary (Ld=Lq=Ls),
Fx=32πτψPMdIq(12.41)
Zero Id is thus automatically maximum thrust/current. Consequently,
V2s=(2LsUFx3ψPMd)2+(2RsFx3πψPMd+πτUψPMd)2(12.42)
This is a typically mild mechanical characteristic: (thrust/speed curve), but with a definite ideal no load speed Ui0 (Figure 12.22).
(Ui0)Iq=Is=0=VsτπψPMd;VS=V√2;V:phase voltage (RMS)(12.43)
The normal force (γ=0) is (12.39)
Fn=(B 2PMq1+B 2ag)pτlstack2μ0(12.44)
but
BPMq1=π2ψPMdlstackτW1kW1(12.45)
and
(Bag1)Id=0=LqmIsπ2lstackτW1kW1(12.46)

FIGURE 12.22 Constant (Id = 0) speed/thrust curves (f = u/2τ, variable).
So
Fn=(π21lstackτW1kW1)2ψ 2PMd[1+(LqmIsψPMd)2]pτlstack2μ0(12.47)
Consequently, the normal force increases with load (IS = jIq, that is, with Fx). This may lead to increased noise and vibration in the mover.
12.7.2 Maximum Thrust/Flux (Ld = Lq = Ls)
Flux weakening is today attempted with surface PM secondary for tooth-wound primary whose total inductance Ls is rather large (due to added large differential leakage inductance of primary mmf space harmonics). A large Ls means a not so large demagnetizing current Id < 0. For constant ψS
ψ 2S=(ψPMd+LsIs)2+L 2sI 2q;Fx=32πτψPMdIq(12.48)
with Iq from Fx in the flux ψS:
(VsπτU)2=ψ 2S=(ψPMd+LsId)2+L 2s(32πτψPMd)−2F 2x(12.49)
The maximum thrust Fx per given ψS (or given speed U and voltage VS) in (12.48):
ψPMd+LsIdk=0(12.50)
So
Idk=−ψPMdLs(12.51)
However, in such conditions for Fx=0 (ideal no load) in (12.49), U0 = ∞ (infinite ideal no load speed). The force/speed curve for different values of Id ≠ 0 are shown in Figure 12.23 for given voltage VS = VS max.
This time the thrust and normal force from (12.39) and (12.44) through (12.48) are
Fx32πτψPMdIscosγ;for Fx<γ>90°(12.52)
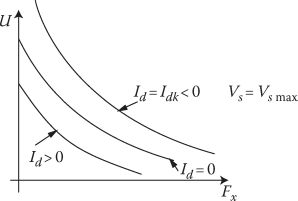
FIGURE 12.23 Speed/thrust curve for nonzero Id.
Fn=(π21lstackτW1kW1)2ψ 2PMd[1+(LqmIsψPMd)2+2LqmIsψPMdsinγ]⋅pτlstack2μ0γ=tan−1(IdIq);γ<0for Id<0(12.53)
Is=√I 2d+I 2q;Lqm=LmLd=Lq(12.54)
The normal force may be controlled by the angle γ ≠ 0, and the thrust may be varied by the current amplitude, Is. Fx and Fn both depend on γ and Is, so their control is not decoupled. This has consequences when integrated propulsion and levitation are targeted.
Note: For Ld ≠Lq, the maximum thrust/flux conditions yield a different I′dk≠Idk=−ψPMs/Ls (see Ref. [18], for more details).
Example 12.1
F-LPMSM with Ld=Lq = LS characteristics
Let us consider a flat F-LPMSM with a surface PM secondary and the following data:
Vsmax = 120 V (RMS) per phase, T = 0.06 m, BgM1 = 0.7 T, Ld = Lq = Ls = 30 mH, RS=3 Ω, stack length lstack=0.1 m, 2p = 4 poles, q = 1 slot/pole/phase single layer winding, and W1 = 400 turns/phase.
Calculate:
The PM flux linkage per phase ψPMd.
For Id=0 the ideal no load speed Ui0 and the corresponding (maximum) frequency ω1max.
For US = Ui0/2 and Iq0 = −10 A (Id=0), determine the thrust Fx and the voltage, frequency, thrust/watt losses (N/W), and specific thrust (N/cm2).
For same US = Ui0/2 and Id = Idk/3 = -ψPMd/3LS calculate Iq, thrust, and voltage, and discuss the results; calculate the efficiency and power factor.
What current density is needed in the winding design; are the data realistic?
Solution
The PM flux linkage per phase ψPMd is
ψPMd≈2πBPMg1τ⋅Istack⋅W1kW1=2π×0.7×0.06×0.1×800×1×=1.07 W b(12.55)
(b) The ideal no load speed U,0 is
Ui0=Vs⋅τπ⋅ψPMd=120√2×0.06π×1.07=3.02×π0.06=158.0 rad/s(12.56)
So
flm ax=ωlm ax2π=25 H z
(c) For Id = 0 and Iq = −10 A (as kU = −U < 0, Iq < 0 for motoring) the thrust (12.41) is
Fx=32πτψPMdIq0=32π0.06×1.07×(−10)=−840 N(12.57)
The voltage components Vd and Vq at U = Uj0/2 = 1.51 m/s are
Vd=Rs⋅Ido−kπτU⋅Ls⋅Iq0;k=−1(PM secondary bng stator)Vq=Rs⋅Iqo+kπτU⋅ΨPMd(12.58)
So
Vd=2×0+π×1.50.06=23.707 VVq=3×(−10)−π×1.5×0.003×(−10)0.061.07=114.55 V(12.59)
Vs=√V 2d+V 2q=116.98 V(12.60)
The specific thrust fx is
fx=|Fx|2pτlstack=8404×0.06×0.1=3.5×104N/m2(12.61)
The copper losses are
PCo=32RsI 2q0=32×3×102=450 W(12.62)
FxPCo=840 N450 W≈1.866 N/W(12.63)
(d) For
Id0=−ψPMd3Ls=−1.07(3×0.03)=−11.88 A(12.64)
This time the thrust is the same as it depends only on lq0 but the voltage required is
V′d=3×(−11.88)−π0.06×1.51×0.03×(−10)=−59.347 VV′q=3×(−10)−π0.06×1.51×(1.07−0.03×11.88)=−56.39 V(12.65)
V′s=√V′d+V′q=81.865 v<<Vs=116.98 at the sam e speed and thrustbutw ith Id=0 (12.66)
This simply means that the maximum voltage allows larger thrust at the same voltage or higher thrust at speeds above Uj0/2 to Ui0.
The efficiency η at ld=0, lq0 = −10 A, Fx = -840 N, U = Ui0/2 = 1.51 m/s is (zero core losses)
η=Fx⋅k⋅Uk⋅Fx⋅U+PCo=(−840)×(−1.51)(−840)×(−1.51)+450=0.738(12.67)
The power factor for this case is
(cosφ)Id0=|Vq|Vs=114.55116.98≈0.98(12.68)
This performance looks good in comparison with previous linear electric motor examples (LIMs and L-RSMs or L-SRMs) but is it realistic?
(e) Let us first check what current density would be needed for the 4 pole q = 1, single layer winding for, say, Iq0=−10A, Id0=0(In=10/√2) A per phase, RMS value). We do have for 4 poles only 2 coils per phase, so the number of turns per coil nC = W1/2 = 400/2 = 200 turns/coil. The turn length lc is
IC≈2⋅Istack+0.02+2×1.4⋅τ=2×0.1+0.02+2.8×0.06=0.388 m(12.69)
So the phase resistance RS yields
Rs=2.ρCo⋅ICWCJCOIn=3Ω(12.70)
JCo=3×10/√22.1×10−8×400×0.388=6.583×106=6.583 A/m m2(12.71)
This looks OK but let us check the slot depth as the slot pitch τs = τ/3 = 20 mm and the slot width may be WS = 0.55 • τs = 11 mm.
With a slot filling factor kfill = 0.5, and one coil per slot, the slot height hS is
hs=nCIq0/√2JCo⋅kfill⋅WS=200×10/√26.528×0.5×11=39.50 m m(12.72)
So the slot aspect ratio is OK: hS/WS=39.5/11 = 3.59 < 4−5, required to limit the slot leakage inductance. Still there is one more crucial step in checking: the practicality of the data.
An ultimate verification refers to the machine inductance, though the electric time constant τe = Ls/Rs = 30 • 10−3/3 = 10 ms seems feasible.
For BgPM = 0.7 T, with bonded NeFeB PMs; Br = 0.8 T, μrec = 1.05 • μ0, for an airgap g = 1 mm, the PM thickness is obtained from (PMs cover full pole span in our example):
π4BgPM1=Brhmhm+g⋅11+kfringe;kfringe≈0.20(12.73)
So
hmhm+g=0.7×4×1.2π0.8=0.8245 sohm≈5.7 m m(12.74)
So the airgap inductance Lsg (12.24) is
Lsg=43(Laa−LsI)=43μ0W21⋅τ⋅Istack(1+kfringe)2p⋅(g+hm) =431.256×10−6×4002×0.06×0.1(1+0.1)4×(1+5.7)×10−3=0.0671 H=67.1 m H(12.75)
If we add the leakage inductance (Ls = Lsl + Lsg), we could end up with 90 mH instead of 30 mH assumed in our numerical example. So finally, the example data are not practical but they serve to demonstrate the multitude of aspects encountered in F-LPMSM design. The forthcoming paragraph on design methodology by example will deal with practical data and results.
12.8 F-LPMSM Control
As MAGLEV detailed control will be dealt with in a separate later chapter, here the FOC and the DTFC for propulsion only will be treated in what follows. Most applications, in such conditions, refer to industrial cases (low speed and a few meter long travels), where primarily position control is the target, and thus we will concentrate on this aspect from the start.
12.8.1 Field Oriented Control (FOC)
Making use of the dq model of F-LPMSM makes the FOC rather straightforward. There are two main types of FOC: indirect and direct, and then again with dc current controllers or with ac current controllers [19], and, finally, with position sensor [13] and without position sensor:
Indirect FOC
Direct FOC
With ac current controllers
With dc current controllers
With position sensor
Without position sensor
For constant Id, the dq equations (12.32 through 12.34) of F-LPMSM may be written as
Vd=RsId0−πτkU⋅LqIq;Fx=32πτ(ψPM+(Ld−Lq)Id0)IqkVq=RsIq+LqdIqdt+πτUk(ψPM+LdId0)GmdUdt=Fx−Fload−BU;dxdt=U;Tm=GmB(12.76)
With d/dt = s and Lq/Rs = Teq, they lead to the structural diagram in Figure 12.24a.
The structural diagram resembles those of dc PM brush (when Id=0) or of rotor PM brushless ac motors, as expected.
We choose here the indirect FOC with ac current controllers due to its simplicity and because the fundamental frequency is small enough, to avoid notably phase error lag in current at highest speed for industrial applications. Also, position control is the target (Figure 12.24) where PM secondary is the mover (k = 1). Speed control is optional, and the FOC in Figure 12.24 is very robust if the current controllers’ response has reasonable dynamic and steady-state errors, up to maximum speed and current. As the airgap may vary, ψPMd varies; also the dc link voltage may vary and then the current controllers cannot respond properly for large thrust commands; for stability, I*d and I*q have to be suppressed until the current controller errors become reasonable for extreme conditions.
If the F-LPMSMs are used for industrial (or transportation) MAGLEV carriers, say with four F-LPMSM, one in each corner, additional control coils may be used to control the levitation of the vehicle (Figure 12.25) [20]. To a first approximation, the resultant thrust per vehicle side and the total thrust may not be influenced too much by levitation control (due to compensation of vertical motions between vehicle corners) and thus still pure I*q control may be used for propulsion, with the dc control coils used for dynamic stabilization of suspension. As a more sophisticated system, both I*d and I*F (in the dc coil) of each of the four F-LPMSMs may be controlled concurrently, for optimum propulsion and levitation control (for levitation) and I*q control (for propulsion), if the machine inductance is large enough to allow reasonable I*dmax values (negative and positive!). In this case, however, the inverter utilization will be poorer.

FIGURE 12.24 F-LPMSM: (a) structural diagram and (b) indirect ac current vector control.
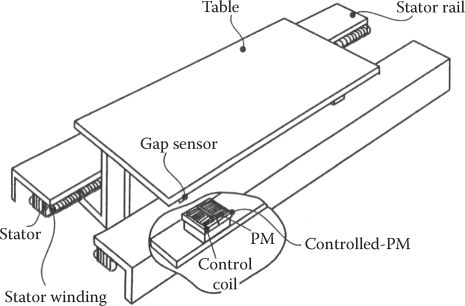
FIGURE 12.25 Industrial MAGLEV with four F-LPMSMs.

FIGURE 12.26 Alternative for integrated levitation (and propulsion) control of F-LPMSM MAGLEV carrier.
The two control alternatives identified here are depicted in Figure 12.26.
It goes without saying that the addition of dc control coils may lead to probably better levitation control, but levitation control by I*d control (by adding Id dc regulators) may suffice in some applications.
Besides the here-suggested PI + SM (sliding mode) controllers for speed control plus P controller for position control and interior dc current regulators (Figure 12.24), recently fuzzy-neural-network controllers proposed to replace the position and speed cascaded controllers have been introduced [21,22]; Figure 12.27 [21].
Sample results in Figure 12.28 show that the dynamic errors are still up to 0.2 mm for a trapezoidal periodic positioning of ± 5 mm with a period of 2 s [21]; and all these with position sensor resolution of a few μm.
Thrust pulsations due to nonsinusoidal emf, airgap variations, cogging force, and current ripple and vibration due to large normal force might be pertinent reasons why the dynamic positioning errors are still large.
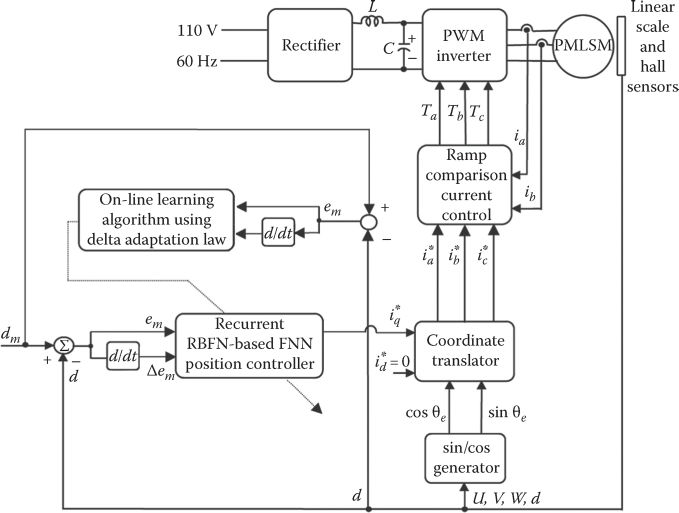
FIGURE 12.27 FOC with fuzzy neural network position control of F-LPMSMs. (After Lin, F.-J. et al., IEEE Trans., MAG-42(11), 3694, 2006.)
A way to reduce thrust total ripple, by cogging force pulsations compensation and using primary coordinates, is given in Ref. [23] (Figure 12.29); this may be a way to better dynamic position tracking with F-LPMSMs.
12.8.2 Direct Thrust and Flux (Levitation) Control (DTFC) of F-LPMSMs
In applications where thrust (rather than position or speed) tracking is required, direct flux and thrust estimation is performed; if the position feedback is available, the flux observer may be designed rather easily to work satisfactorily above 1-2 Hz; if position-sensorless control is required, then all the “arsenal” of motion sensorless control of rotary PMSMs may be “summoned to duty” for F-LPMSM [19,24]. Let us present such a generic position-sensorless DTFC system for F-LPMSM (Figure 12.30).
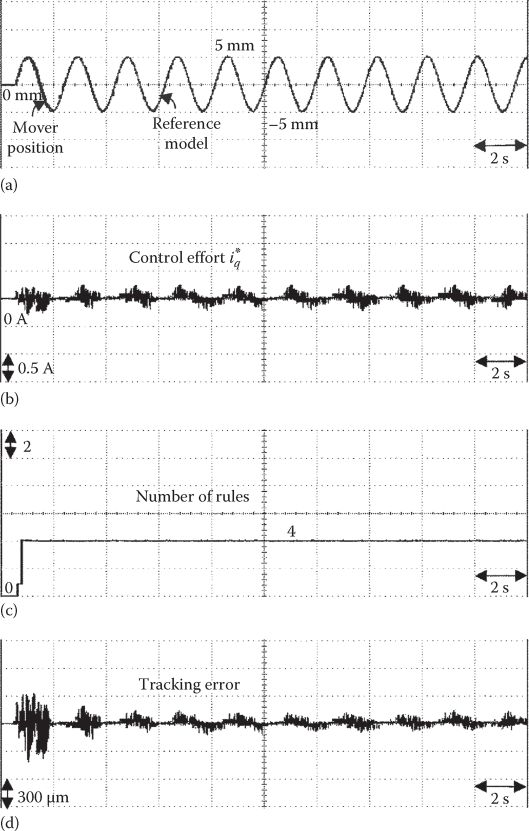
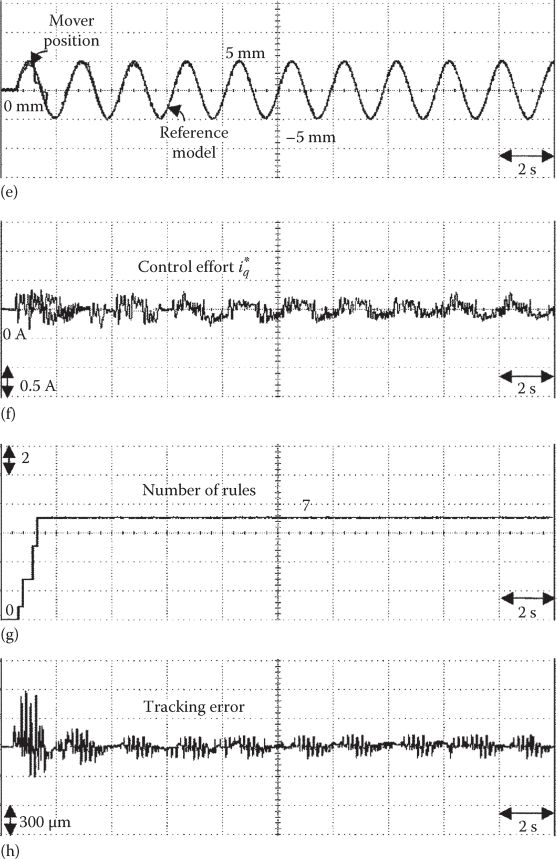
FIGURE 12.28 Test results with RBFM-based FNN position FOC of F-LPMSM. (After Lin, F.-J. et al., IEEE Trans., MAG-42(11), 3694, 2006.) (a) tracking response at nominal condition, (b) control effort at nominal condition, (c) number of rules at nominal condition, (d) tracking error at nominal condition. Test results with RBFM-based FNN position FOC of F-LPMSM. (After Lin, F.-J. et al., IEEE Trans., MAG-42(11), 3694, 2006.) (e) tracking response at parameter variation condition, (f) control effort at parameter variation condition, (g) number of rules at parameter variation condition, and (h) tracking error at parameter variation condition.
For the primary flux ˉψs observer (Figure 12.31), we may use here a combined current and voltage model [18]:
ˉψsS=∫(ˉVS−RSˉIS+Vcomp)dt(12.77)
Vcomp compensates the inverter nonlinearities and the primary resistor variations while it uses a PI loop on the error between the current and the voltage model (12.68), in stator coordinates, so as to produce both low-speed and higher-speed (frequency) primary flux good estimation (Figure 12.31).

FIGURE 12.29 F-LPMSM vector control with i*d ′=0 (a) and with cogging force compensation and (b) thrust and speed pulsation reduction (with i*d ′=0 control) (c). (After Zeng, L. et al., IEEE Trans, MAG-46(3), 954, 2010.)

FIGURE 12.30 Generic DTFC of LPMSM.
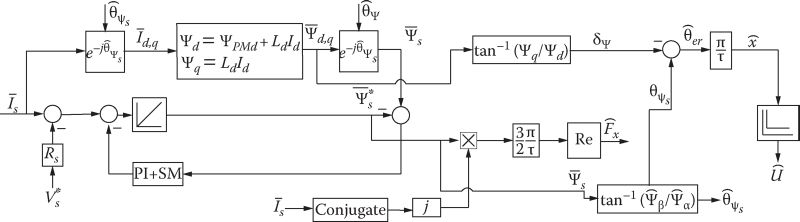
FIGURE 12.31 F-LPMSM state observer for sensorless DTFC: the primary flux ˉψs, thrust Fx, primary flux angle ⌢θψS, speed ⌢u, and position ⌢x (relative).
A few comments on DTFC are as follows:
The current to flux model (Figure 12.31) requires the stator flux angle ⌢θψS and is strictly valid in steady state; otherwise, the mover position angle ⌢θer may be used instead.
The speed ⌢u is estimated from relative position ⌢x by a time derivative; in reality, a PLL or other digital filter may be used to improve ⌢x and obtain a better ⌢u (speed estimation).
The relative position estimation ⌢x may be used for drive positioning only if some proximity sensors exist along the track for periodic position calibration.
For initial position, or a nonhesitant start, a signal injection addition to ⌢x is needed [19]. The primary flux amplitude control, Figure 12.30, is used to control the airgap (via normal force); a normal force estimator may also be added; then an additional normal force regulator is required before the stator flux ψS regulator.
The presence of PM flux makes the stator flux (and normal force) regulations (by Id essentially) rather stiff but still worthy of consideration as no addition of power hardware is required for levitation control.
If cogging force cancelation is required, it is possible to add (−Fcog(x)) to F*x and thus, with enough bandwidth in the thrust regulator, the F-LPMSM may compensate cogging force through the control system.
For industrial (low speed) travel (a few meters) with short primary mover MAGLEV carriers, it may be feasible to use interior PM fixed secondary with weaker PMs and higher magnetic saliency Ld/Lq ≥ 3 (airgap: 0.5 mm) (Figure 12.32).
Note on trapezoidal current control: As already discussed, both with air-core and iron-core primary, the emf may be trapezoidal (with q1 = 1 and with q1 < 0.5 (tooth-wound windings); in such cases, instead of sinusoidal current control (FOC or DTFC), trapezoidal (block) current control may be performed to avoid too large thrust pulsations, to better use the dc voltage coiling of the inverter, and to simplify the position (to proximity) sensor (three Hall sensors of low cost). To avoid repetition, this type of control will be treated in some detail in the next chapter, dedicated to tubular L-PMSMs.

FIGURE 12.32 PM-assisted linear reluctance synchronous motor.
12.9 Design Methodology of L-PMSM by Example
Any design methodology starts with a set of specifications such as
Base continuum thrust: Fxn = 0.8 kN
Base speed: Ub=1.5 m/s
DC voltage: Vdc=300 V
Primary: as mover (short)
Normal force: zero (double-sided PM long secondary (stator))
Primary core: iron core
Airgap: g = 1 mm
Travel length: 3.5 m
Maximum speed: Umax = Ub = 1.5 m/s
Peak thrust at max. speed: Fxpeak = 1.2 kN
Efficiency at base power (1.2 kW) at base speed > 0.85
Power factor at base power (1.2 kW) at base speed > 0.8
Maximum ideal acceleration of primary amax > 40 m/s2
Primary mover supply: by ac power flexible cable
What is required may be summarized as follows:
Use a realistic analytical model, size the PM long secondary and the short primary core.
Calculate, by the same model, the machine circuit parameters (inductances and resistances).
Use the circuit model (and vector diagrams) to calculate the performance at base (maximum) speed and base and peak thrust for Vdc=300 V.
Redo the process until all specifications are met.
Eventually, use a numerical code optimization design by choosing a variable vector, its domain of allowed values, and the aforementioned analytical model (or a more complex one) to evaluate a global objective function with constraints; then use an optimization algorithm (Hooke–Jeeves and genetic algorithms in [17]) to find an optimal design.
12.9.1 PM-Secondary Sizing
As there is no flux weakening in the design data (Ub = Umax), to yield good efficiency (high thrust/copper losses), surface PMs are planted on the two fixed long secondaries (stators); to reduce further thrust pulsations (cogging force), we use multiples of 6 slot/8 PM pole combinations for the primary/secondary and displace the two PM secondaries by 1/6 of a PM pole pitch (step skewing).
The primary teeth are premade and wound and fixed to a frame at stack ends; the bolts in the trapezoidal open holes are made of nonmagnetic material; the respective holes cause a further reduction of cogging force. Other manufacturing technologies of primary are feasible. As a 6 teeth (slot) primary/8 PM pole combination module is considered, the fundamental winding factor kW1=0.866. A 12 slot/10 PM pole module would have had kW1=0.933, both for a double and a single layer winding (as the one in Figure 12.33). The 2p > NS (8/6) means less maximum PM flux per coil for larger thrust per given mmf than for the 4 PM pole, 6 slot case. Also, the yoke flux is smaller, so the stator yoke of fixed long secondary (stator) is thinner; consequently, cost is reduced notably. The machine has two airgaps, but this is “the price” for ideally zero normal force on primary movers.
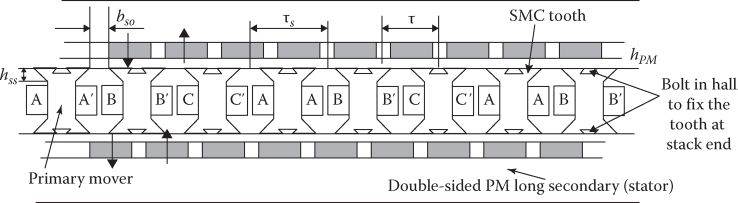
FIGURE 12.33 Double-sided F-LPMSM with primary mover (6 slots/8 PMs poles).
An FEM study considering variations for τPM/τ, τPM/τs, bs0/τs, g/hm would lead to a practical design that mitigates between more average thrust density (N/cm2) at a good loss factor (N/W) with small enough cogging force. However, τPM ≈ (τs − bs0)0.8, τ = 30 mm, τs=τ • 2p/NS=30 × 8/6=40 mm would be a good start (g = 1 mm, bs0=(3−4)g = 3−4 mm). After choosing the airgap PM flux density BPMg = 0.7 T for a bonded NeFeB PMs with Br=0.8 T, µrec = 1.07 μ0, the PM height hm is calculated from (12.65)
BPMgπ4=BPMgu=Br⋅hmhm+g⋅11+kfringe;hmhm+g=0.7×1.2×4π0.8=0.825(12.78)
The fringing factor kfringe (due to loss of PM flux between teeth necks), for surface PMs, if bs0/g=4−5, kfringe ≤ 0.2 (it may be checked by FEM). BPMgu is in fact the “useful” flux density that produces PM flux in the primary coils. For g = 1 mm, it follows that hm = 5.7 mm. This rather thick PM leads also to smaller main inductance and thus to a better power factor (lower inverter kVA); since bonded NeFeB PMs are considered, their total cost should be reasonable. The PM span τPM = (τs − bS0) × 0.8 = (40 − 5)0.8 = 28 mm < τ=30 mm; the inter-PM space may be filled with adhesive to better fix the magnets.
The yoke of PM-secondary hyS is
hyS≈τPM⋅BgPMuByS=28×0.71.7=11.5 mm(12.79)
To allow for armature-reaction contribution at peak thrust, hyS = 15 mm; solid mild steel may be used for PM-secondary yoke; the magnetic airgap (g + hm) is large and thus the subharmonics flux of the primary mmf does no “reach” the solid yoke of stator to produce large eddy currents. Still to find is the primary stack length lstack, almost equal to PM (and stack) length. Considering a base thrust density fxb = 2 N/cm2 (3 N/cm2 for peak thrust) and an integer number of primary modulus, the thrust is
Fxn=fxb⋅lstack⋅6τs⋅n(12.80)
Hence, the choice between lstack and number of primary-mover modules, n, depends on the secondary (travel) length, which, then, determines its initial costs. For a 4 m length track, the primary length could not be above 0.5 m (travel length 3 m); for n = 2, the primary length is 6τS • n = 6 × 40 × 2 = 480 mm = 0.48 m.
Consequentanly lstack is
lstack=8002×104×0.48=0.0833 m(12.81)
12.9.2 Primary Sizing
For Ub = 1.5 m/s and τ = 0.03 m, the base frequency f1b = 1.5/(2 × 0.03) = 25 Hz. Assuming that the PM flux linkage ψPMd in the primary coils (4 in all, in series per phase) varies sinusoidally with mover position, its peak value is approximately
ψPMd=BPMguτPMguτPMlstack4WCkW1;p=4(12.82)
WC is turns/coil
ψPMd=0.7×0.028×0.0833×4×WC×0.86=5.66×10−3⋅WC=kPMWC(12.83)
The rated (base) thrust Fxn is
Fxn=800=32πτψPMd⋅Iqn=32π0.03×5.66×10−3×WC⋅IsnIqn=Isn (Id=0)(12.84)
So WC • Isn=900 A turns/coil (peak value). As there are two coils in a primary slot, the active area of the slot, Aslot is
Aslot=2WC(Isn/√2)jCokfill=2×900/√245×0.4=792 mm2(12.85)
The slot width bs ≈ 0.5τS=0.5 × 40=20 mm, so the active slot height hsu is
hsu=Aslotbs=792bs≈40 mm(12.86)
Note: We have to add on each side of the doubly opened slot about 5 mm (hss=4 mm) of height, to leave room for the rods that support the primary cores.
The rated current density jCon=4 A/mm2 and the slot fill factor kfill=0.4, as there is space between the two coils in slot.
There is no yoke in the primary mover, in order to reduce its weight.
12.9.3 Circuit Parameters and Vector Diagram
The synchronous inductance comprises the “magnetization” one Lm=Ldm=Lqm and the leakage one Ll. The magnetization inductance is straightforward (and apparently includes space harmonics contribution):
Lm≈32μ0(τs−bs0)lstackW2C44(g+hm)kC;p=4=number of coils/phase(12.87)
or
Lm=32⋅1.256×10−6×(0.04−0.005)×0.0833×4×W2C4×(1+5.7)10−3×1.1=0.7453×10−6⋅W2C(12.88)
The leakage inductance of the four coils per phase includes basically slot leakage and end coil leakage components:
Ll=4×2μ0⋅lstack(λslot+lelstack⋅λend)⋅W2C(12.89)
The slot is doubly opened and the variation of leakage field H along slot height is as in Figure 12.34.
The situation is equivalent to two semiclosed slots of half-height, but with doubled slot width:
λslot≈2(hsu3⋅(2⋅bs)+hssbs+bs0)=2(4023×2×20+420+5)=0.652!(12.90)
The end coil geometrical permeance λe ≈ 0.63 (as in q = 1 windings) [19].
Ll=4×2×1.256×10−6×0.0833×(0.652+1.2×0.040.0833×0.33)⋅W2C=0.7049×10−6⋅W2C(12.91)
As seen Ll ≈ Lm, since the machine has four large equivalent airgaps per flux closed path. So Ls=Lm+Ll = 1.45 × 10−6 WC2.
The phase resistance RS is simply
RS=4ρcolcW2cjconWCIsn/√2=4×2.1×10−8×0.28264×106900/√2⋅W2C=1.4876×10−4⋅W2C=kR⋅W2C(12.92)
lC≈2⋅(lstavk+1.2⋅τs+0.01)=2⋅(0.0833+1.2×0.04+0.01)=0.2826 m(12.93)
As the f1b=25 Hz, the core losses are to be notably smaller than copper losses (less than 1 W/kg at 1.5 T and 25 Hz). Standard transformer (oriented grain) laminations (0.35 mm thick) may be used.
The vector diagram “spells” the voltage equation (Figure 12.35):
ˉVS0=RSˉIS0+jπτ(Uk)ˉψS;ˉψS=ψPMd+jLqIq;Id=0(12.94)
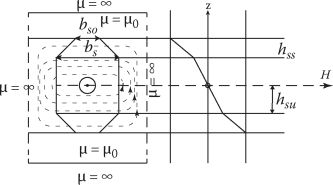
FIGURE 12.34 Slot leakage field.
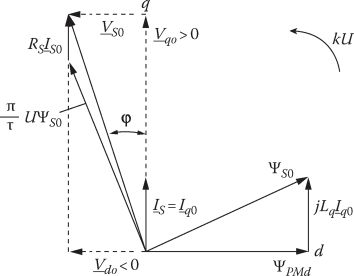
FIGURE 12.35 F-PLMSM vector diagram at steady state with Id=0.
Vd0=RSId0−πτ(Uk)LqIq0Vq0=RSIq0+πτ(Uk)ψPMdVS0=√V2d0+V2q0(12.95)
k = 1 for PM mover
k = −1 for primary mover
12.9.4 Number of Turns per Coil WL and Wire Gauge dCo
To calculate the number of turns Wl, we have to “test” the vector diagram at peak thrust (rather than base thrust) at maximum voltage Vs max:
Vsmax≈2Vdcπ⋅0.95=2×300π×0.95=181.52V (peak phase valu)(12.96)
For 1200 N of thrust WC • ISpeak = 1.5 • WC • ISn = 900 × 1.5 = 1350 A-turns (peak value per coil); there are four coils in series per phase. Knowing the parameters’ expressions (but WC), we may now use the vector diagram:
Vsmax=WC√(kPMπτ⋅U+kR(WC⋅Ispeak))2(πτ⋅U⋅kLWC⋅Ispeak)2Vsmax=WC√(5.66×10−3×π0.03×1.5+10−41.4876×1350)2+(π0.03×1.5×1.45×10−6×1350)2 =WC√1.089442+0.30732=WC⋅1.132(12.97)
So
WC=181.521.132=160 turns/coil
As
WCIsn=900;Isn=900160=5.666 A;In=Isn√2=4.014 A(RMS per phase)(12.98)
With jCon=4 A/mm2, the wire diameter is
dCo=√4π⋅Injcon=√4π×4.0144=1.13 mm(bare wire)(12.99)
12.9.5 Efficiency, Power Factor, and Voltage at Base Thrust
At base thrust the phase current In=4.014 A, and thus the copper losses are
pCon=3RSI2n=3×1.4876×10−4×(900√2)2=180.7 W(12.100)
So the efficiency at rated thrust is
ηn=FxnUbFxnUb+pCon=800×1.51200+180.74=0.869>0.85(12.101)
Given the low speed (1.5 m/s), the efficiency, for 2 N/cm2 thrust density, is considered really good.
The power factor can be calculated from (12.87) with WCIsb = WCIpeak × 2/3; with WC known, the voltage VS can be obtained from (12.97):
VS=160√(5.66×10−3×π0.03×1.5+10−4×1.486×900)2+(π0.03×1.5×1.45×10−6×900)2 =160√1.022482+0.204882=160×1.0428=166.848 V(peak phase value)(12.102)
The power factor may be calculated simply as
cosφn=1.022481.0428=0.98(12.103)
Even for peak thrust the copper losses are
pCop=pCon(FxpeakFxn)2=180×(32)2=405 W(12.104)
ηpeak thrust=1200×1.51800+405=0.816(12.105)
And from (12.87)
cosφpeak=1.08141.132=0.955(12.106)
12.9.6 Primary Active Weight
The primary active weight is made of core weight Wcore and copper weight WCopper:
Wcore=12ltack[τs⋅(hsu+2hss)−(hsu⋅bs+(bs+bS0)hss)]γiron =12×0.0833×[0.04×(0.04+2×0.005)−(0.04×0.02+(0.02+0.005)×0.005)] ×7600=8.138 kg(12.107)
Wcopper=3×lcWc×4×InγCojCon=3×0.286×160×4×4.014×8900(4×106) =4.846 kg(12.108)
Wap=Wcore+WCopper=8.138+4.846=12.98 kg(12.109)
Let us suppose that the primary framing and rolling facility of mover leads to a total mover weight Wmover=20 kg. Consequently, the ideal maximum acceleration (available up to base (maximum) speed of 1.5 m/s for Fxpeak = 1200 N) is
aimax=120020=60m/s2≈6⋅agravity>>40 m/s2(12.110)
12.9.7 Design Summary
Primary (mover) active and total weight: 12.98 kg/20 kg.
Maximum ideal acceleration (up to 1.5 m/s) is 60 m/s2.
The efficiency and power factor at rated thrust 800 N and Ub are 0.869 and 0.98, respectively, fn=25 Hz, Vsn = 161.848 V (peak phase value).
For the peak thrust (1200 N) and Ub = 1.5 m/s at Vsmax = 181.52 V (Vdc ≈ 300 V), efficiency is still 0.816 and the power factor is still very good: 0.955.
The rather very good power factor is due to the small fundamental frequency fn = 25 Hz, and due to the small machine inductance LS = 1.45 × 10−6 × 1602 = 37.12 mH; the stator resistance RS = 1.4876 × 10−4 × 1602 = 3.808 Ω.
In turn LS is small due to the large total magnetic airgap 4(g+hm) and small leakage inductance due to doubly opened slots and short end-coils (small pole pitch).
As power factor is high, the design at higher thrust for higher current density, smaller number of turns, but lower efficiency is also possible.
It is quite disputable that such performance, at such a low speed, can be surpassed in aggregated performance by many other configurations.
12.9.8 Note on F-LPMSM as Three-Phase Generators
For wave generators, speeds in the range of 0.7–1.5 m/s are required for very large thrust (tens of kN for tens of kW and hundreds of kN for hundreds of kW) for short (a few meters) travel length. For such designs, square-shape (four-sided) F-LPMSM has been proposed for 16 kW generators with PM-mover, operating at 10 Hz for 0.9 m/s [25]. As the thrust density for rather small pole pitch (τ=45 mm) is not very high—as seen earlier, the weight and cost of the device are still large. A 250 kW (speed around 1 m/s) F-LPMSM wave generator has been calculated in [26]. It uses a tooth-wound winding in the double-sided short stator and double-sided PM long mover (translator) with interior PMs. By proper skewing with semiclosed stator slots, the cogging force was reduced to well below 1% of rated thrust. However, at moderate pole pitch (in latter case [26] τ = 60 mm in the PM mover) and slot pitch τs = 165 mm!) and such a small speed, it is still hard to say that q = 1 or q < 0.5 winding stator configurations will result in acceptable power/weight and efficiency for large wave generators. Shifted tooth wound τ=τs primaries (by half slot pitch) pitch phase double-sided modules for F-LPMSM have been proven to allow larger thrust density with low armature reaction [27] and may constitute a way to lower weight for such large thrust for reasonable generator weight cost, efficiency, and power factor (which influences heavily the PWM inverter kVA ratings and cost).
12.10 Summary
Linear PM synchronous motors are the counterparts of the rotary PM synchronous machine, which are characterized essentially by sinusoidal emf and thus by sinusoidal current control.
The primary has a three-phase ac winding area built with distributed coils (q ≥ 1) or tooth-wound (nonoverlapping) coils (q ≤ 0.5), placed in the uniform slots of a laminated iron core or in an air (plastic) core.
The primary may be the stator, placed along the track, or the mover; in the latter case, the electric power is transferred to the mover by sliding power collector (pantographs) or by flexible power cable for short travel.
The PM secondary or primary may be the mover.
To cancel the normal force, double-sided primaries or secondaries are used.
To calculate the emf thrust Fx and normal force Fn, typical to flat linear PM synchronous motors (F-LPMSMs), a 2(3) D multilayer analytical field model is first applied; even slot openings can be considered by defining a proper inverse-airgap function.
Also 2(3) D magnetic equivalent circuit (MEC) methods are used to fully characterize F-LPMSMs, including magnetic saturation, besides all geometry parameters (and slot openings).
These two methods allow to calculate emfs, force, and inductances —circuit parameters—to prepare all data for phase variable and then for the dq model of F-LPMSMs.
In addition, the moderate computation time of multilayer methods recommends them for optimization design methodologies.
For “ultimate” precision, 2(3) D-FEM is used (in its magnetostatic, time stepping, and field-circuit modes) to describe F-LPMSM; the only trouble is the computation time; to check (and correct) or to perform direct geometric optimization design around the analytical optimum design, FEM is the way to go.
Field theories yield the data (dB/dt in essence) for calculation of core losses.
F-LPMSM with iron-core primary experience a longitudinal force at zero current, called cogging force (the counterpart of cogging torque in rotary PM machines); it is caused by the variation of coenergy stored in the PMs with slot openings; as expected its average is practically zero; the cogging force pulsates at the number of periods equal to LCM (Nslots, 2p PM poles); the larger the LCM, the smaller the cogging force peak.
Methods to reduce cogging force [28] are similar to those used in rotary machines: PM span/pole/pitch ratio, PM poles displacement, skewing, end-teeth shaping etc; besides, thrust ripple disturbance rejection by control is also feasible [29].
The dq model of F-LPMSM can include not only the propulsion motion (horizontal, in general) but also the levitation motion (vertical, in general along airgap).
There are two FOC methods for F-LPMS control: zero Iq propulsion control and, respectively, flux weakening (I*d<0 control) and thrust (Iq control); alternatively, I*d can be used to control the levitation.
The structural diagrams for constant Id (zero or not) and FOC of F-LPMSMs are very similar to that of PM brush motor, ideal for motion control.
On the other hand, primary thrust and flux control (DTFC) allow direct thrust control and it may be used to control levitation by flux control.
Advanced fuzzy neural network and other robust linear position tracking with F-LPMSM have shown very good steady-state precision but with still large dynamic tracking errors. Using a disturbance force, the observer may substantially enhance relative position tracking by F-LPMSM [30].
A DTFC for F-LPMSM without a position sensor reveals the possibility of even position sensorless tracking if a few calibration proximity position sensors are placed at known points along the track.
A design methodology with a case study for 1200 N (peak value up to 1.5 m/s) shows efficiency above 80%, a very good power factor for a 13 kg active weight (20 kg total) primary mover.
As recent research efforts have shown, the application of F-LPMSM as wave generators is thoroughly investigated (at about 1 m/s) and for 250 kW at 250 kN); the power/weight and efficiency and power factor product need further drastic improvements, before becoming economical.
New configurations with ever better performance keep surfacing [31–33].
References
1. Z. Deng, I. Boldea, and S.A. Nasar, Fields in PM-LSMs, IEEE Trans., MAG-22, 1986, 107–112.
2. Z. Deng, I. Boldea, and S.A. Nasar, Forces and parameters of PM-LSMs, IEEE Trans., MAG-23, 1987, 305–309.
3. Z.Q. Zhu, D. Howe, E. Bolte, and B. Ackerman, Instantaneous magnetic field distribution in brushless PM dc motors, Parts I-IV, IEEE Trans, MAG-29(1), 1993, 124–158.
4. V. Ostovic, Dynamics of Saturated Electric Machines, John Wiley & Sons, New York, 1989.
5. W.B. Jang, S.-M. Jang, and D.-Y. Yon, Dynamic drive analysis through base speed determination for optimum control boundary in PMLSM with self-load, IEEE Trans., MAG-41(10), 2005, 4027–4029.
6. D.L. Trumper, W.-J. Kim, and M.E. Williams, Design and analysis framework for linear PM motors, IEEE Trans, IA-32(2), 1996, 371–379.
7. B. Sheikh-Ghalavand, S. Vaez-Zadeh, and A.H. Isfahani, An improved magnetic equivalent circuit model for iron-core linear permanent magnet synchronous motors, IEEE Trans., MAG-46(1), 2010, 112–120.
8. I. Boldea, S.A. Nasar, and Z. Fu, Fields forces and performance of air-core linear self-synchronous motor with rectangular current control, IEEE Trans, MAG-24, 1988, 2194–2203.
9. T.J.E. Miller, Brushless PM and Reluctance Motor Drives, Oxford University Press, Oxford, U.K., 1989.
10. N. Baatar, H.S. Yoon, M.T. Pham, P.S. Shin, and C.S. Koh, Shape optimal design of a 9 slot 10 pole PM LSM for detent force reduction using adaptive response surface method, IEEE Trans, MAG-45(10), 2009, 4562–4565.
11. D.-Y. Lee, Ch.-G. Jung, K.-I. Yoon, and G.T. Kim, A study on the efficiency optimum design of a PM type LSM, IEEE Trans, MAG-41(5), 2005, 1860–1863.
12. S. Chaithongsuk, N. Takorabet, and F. Meybody-Tabar, On the use of PWM method for the elimination of flux density harmonics in the airgap of surface PM motors, IEEE Trans., MAG-45(3), 2009, 1736–1739.
13. J. Gieras, Linear Synchronous Motors, Chapter 5, CRC Press, Boca Raton, FL, 2000 (second edition, 2010).
14. B.-Q. Kou, W.H. Xing, L.-L. Yi, Z.-L. Liang, Z. Zhe, and C.-H. Chuan, The thrust characteristics investigation of double sided PMLSM for EML, IEEE Trans, MAG-45(1), 2009, 501–505.
15. G. Henneberger and C. Reuber, A linear synchronous motor for a clean room system, Record of LDIA-1995, Nagasaki, Japan, 1995, pp. 227–230.
16. I. Boldea and V. Coroban, BEGA—Vector control for wide constant power speed range at unity power factor, Record of OPTIM-2006, Brasov, Romania, 2006 (IEEExplore).
17. I. Boldea and L. Tutelea, Electric Machines: Steady State, Transients and Design with Matlab, Chapters 6 and 9, CRC Press, Taylor & Francis, New York, 2009.
18. I. Boldea and S.A. Nasar, Linear Motion Electromagnetic Devices, Chapter 4, Taylor & Francis Group, New York, 2001.
19. I. Boldea and S.A. Nasar, Electric Drives, 2nd edn., Chapters 10 and 11, CRC Press, Taylor & Francis Group, New York, 2009.
20. K. Yoshida, Y. Tsubone, and T. Yamashita, Propulsion control of controlled PMLSM Maglev carrier, Record of ICEM-1992, Manchester, U.K., 1992, pp. 726–740.
21. F.-J. Lin, P.-H. Shen, S.-L. Yang, and P.-H. Chou, Recurrent radial basis function network-based fuzzy neural network control for PMLSM servodrive, IEEE Trans., MAG-42(11), 2006, 3694–3705.
22. F.-J. Lin, P.-H. Shen, S.-L. Yang, and P.-H. Chou, Recurrent functional-link-based fuzzy neural network controller with improved particle swarm optimization for a linear synchronous motor drive, IEEE Trans., MAG-45(8), 2009, 3151–3165.
23. L. Zeng, X. Chen, X. Luo, and X. Li, A vector control method of LPMBDCM considering effects of PM flux linkage and cogging force, IEEE Trans., MAG-46(3), 2010, 954–959.
24. R. Krishnan, Permanent Magnet Synchronous and Brushless Motor Drives, CRC Press, Taylor & Francis, New York, 2010.
25. N.M. Kionoulakis, A.G. Kladas, and J.A. Tegoupoulos, Power generation optimization from sea waves by using PM linear generator drive, IEEE Trans., MAG-44(6), 2008, 1530–1533.
26. J. Faiz, M.E. Salari, and G. Shahgolian, Reduction of cogging force in linear PM generators, IEEE Trans., MAG-46(1), 2010, 135–140.
27. W.R. Canders, F. Laube, and H. Mosebach, High thrust double sided permanent magnet excited linear synchronous drive with shifted stators, Record of LDIA-2001, Nagano, Japan, 2001, pp. 435–440.
28. Y.-J. Kim, M. Wataba, and H. Dohmeki, Reduction of cogging force at the outlet edge of a stationary discontinuous primary linear synchronous motor, IEEE Trans, MAG-43(1), 2007, 40–45.
29. Y.-W. Zhu and Y.-H. Cho, Thrust ripples suppression of permanent magnet linear synchronous motor, IEEE Trans, MAG-43(6), 2007, 2537–2539.
30. Y.-D. Yoon, E. Jung, and S.-K. Sul, Application of a disturbance observer for a relative position control system, IEEE Trans, IA-46(2), 2010, 849–856.
31. Y. Du, K.T. Chau et al., Design and analysis of linear stator PM vernier machines, IEEE Trans, MAG-47(10), 2011, 4219–4222.
32. G. Zhou, X. Huang, H. Jiang, L. Tan, and J. Dong, Analysis method to a Halbach PM ironless linear motor with trapezoidal windings, IEEE Trans., MAG-47(10), 2011, 4167–4170.
33. C.-C. Hwang, P. Li, and C.-T. Liu, Optimal design of a PM-LSM with low cogging force, IEEE Trans., MAG-48(2), 2012, 1039–1042.