
5 Design of Flat and Tubular Low-Speed LIMs
5.1 Introduction
Low-speed LIMs are LIMs whose dynamic end effects can be neglected [(γ2r τ)−1 < 2 p/10] (as described in Chapter 3). They have to be designed, consequently, for a goodness factor less than the optimum value Ge0 (Chapter 3), which varies linearly with the number of poles 2p (Ge = 10 for 2p = 4 and Ge = 40 for 2p = 16).
Though we are intuitively tempted to assimilate low speed with low goodness factor and thus end effect neglection, the situation is more complex, as in principle we could obtain the same equivalent goodness factor G and thus the same end effect (for the given pole count and slip), for up to 3/1 speed ratio [1].
So, we should choose for a low-speed application a low goodness factor (with negligible end effect) or, better, an optimal goodness factor design, which shows some end effect, but for better overall performance (thrust density, efficiency, and power factor)? The answer to this question is related to the application, as higher Ge means inevitably higher pole pitch, which means thicker back iron both in the primary and secondary of SLIMs (the favorite practical topology) and higher initial costs of SLIM.
Therefore, the “low-speed LIM” concept is just a simplified design option based on the strong similarities with rotary IM design methodologies, which constitute a valuable heritage to use for the scope.
In fact the “low-speed LIM” design concept may be the first (very preliminary) design step for any LIM (even for high speed) to get a strong feeling of magnitudes in the absence of a vast industrial experience data, as for rotary IMs.
By design we mean here “dimensioning” or “sizing,” which is the finding of complete manufacturing data (geometry, parameters, and performance characteristics) to meet initial specifications, by using adequate LIM analytical (or numerical) field and circuit models. This operation is a synthesis while using a given geometry of LIM to calculate circuit parameters, and performance is, in fact, an analysis stage.
Optimization design means repetitive usage of design to comply best with initial specifications based on a multiobjective function (with constraints) and a mathematical algorithm to obtain convergence within reasonable computation effort (time). The design refers to three main aspects:
Electromagnetic
Thermal
Mechanical
In what follows we will refer only to electromagnetic design. As for thermal and mechanical design, we will only limit current and flux densities and the shear stress components (propulsion and normal surface force densities in N/cm2) to make sure they comply with standard material properties.
A complete thermal and mechanical design of LIMs (based on analytical and (or) on finite element multilayer model) is beyond our scope here. To save space we will unfold analytical electromagnetic design methodologies for
Flat SLIMS with ladder secondary
Tubular SLIMS with ladder secondary, for speeds below 10 m/s and negligible dynamic end effect conditions, and travel lengths of 1–2 m travel for tubular SLIMS in industry, and tens of meters for other, special, applications.
The aluminum sheet on iron secondary SLIM has been proven to yield poor performance (η1 cos φ1 < 0.2–0.3) [2] for low-speed applications, and thus, in the presence of strong competition of linear permanent magnet (or dc-excited) synchronous motors (LSMs), it will not be treated here further. However it will be considered for medium- and high-speed LIMs because of lower cost of the long secondary (track) for long travels, despite lower η1 cos φ1 (0.4–0.45) than for LSMs (η1 cos φ1 < 0.6–0.7), which implies higher KVA (and costs) PWM inverter supplies in the overall cost of the system (such as net present worth). The costs of the secondary (track) for long travels (tens and hundreds of kms) retain a very important share. To keep the presentation closer to the scope, we will present the design methodologies by numerical examples. The optimization design will be addressed only for medium to high speed (transportation LIMs in Chapter 6). We should emphasize that the LIM design methodology here revolves around the equivalent goodness factor concept. And it is based on 1D analytical field theory, which includes slot opening, magnetic saturation, and edge and skin effects by correction coefficients, as a basis to define the parameters of the standard IM equivalent circuit. The parameters expressions, however, are related to LIM topology and vary with primary mmf and slip frequency via equivalent goodness factor.
Alternative design methodologies are available elsewhere [2].
5.2 Flat SLIM with Ladder Long Secondary and Short Primary
The electromagnetic design of LIMs is related strongly to the application, due to the absence of any mechanical transmission between the latter and the load.
Let us consider here a machine-tool table application with the following general specifications:
1. Specifications
Rated thrust: Fxn=500 N
Maximum travel length: ltravel = 3 m
Rated speed: un=3 m/s
Power source: three-phase ac 220 V/60 Hz line voltage, with diode rectifier and PWM voltage source IGBT inverter
Some additional data from previous experience are added as follows:
2. Additional experience-based data
The mechanical airgap, with linear bearings, may be chosen as low as g = 1.0 mm, especially if the host primary mover is placed below the ladder secondary (stator) such that the large normal force Fn covers most of the mover total weight (by adequate Fn control); in the latter case, the stress of linear bearings becomes notably smaller than usual.
The allowance for normal force leads to the possibility of choosing a large rated airgap flux density (Bg1n = 0.55 − 0.7 T), not larger, to avoid heavy magnetic saturation of laminated cores of primary and secondary.
Slot shape factor hs1/bs ≈ 4–6 in the primary, lower in the secondary, with slot openings bs1/g < 6 and bs2/g < 4, to keep the leakage inductances of primary and secondary within bounds and, at the same time, reduce Carter coefficient and surface core losses (due to slot space harmonics field); see Figure 5.1.
The primary winding may be single layer (with q1 = 1 slot/pole/phase or q′1 = 2 for lower the mmf. space harmonics), and thus lower the additional cage and core surface eddy current losses, when the number of primary slots Ns1 = 2pq1 it may be also 2 layer type with q1 = 1, 2 and (eventually) chorded coils (x/τ = 5/6 for q1 = 2). For 2p + 1 poles in the primary (with half-filled end pole slots), the coils are shorter so the copper is better used, but primary core is longer (by almost one pole) and thus not completely used. We will choose here 2p poles single-layer, full pitch, (q1 = 2) primary winding, with the slot pitch τs1.
The number of poles 2p is still to be chosen but 2p > 4, to avoid asymmetrical phase currents due to static end effect.
The slot pitch in the secondary τs2 should be different from τs1 (in the primary), but not far from each other (as for rotary IMs), to avoid notable thrust pulsations.
The key dimensioning (sizing) factor considered here is the shear secondary stress: for free air coiling fxn = Fxn/(primary area) ≈ 1 N/cm2 and 1.5–2 N/cm2 for forced air cooling. This value interval of fxn is justified only by the rather small airgap and the ladder secondary (for Al-on-iron secondary SLIMs fxn is smaller for low-speed applications).
As we make use of the rotary IM equivalent circuit (Figure 5.2), we gather here the expressions of circuit parameters (as developed in Chapter 4, [4,5]):

FIGURE 5.1 Flat primary and secondary slot geometries. (After Boldea, I. and Nasar, S.A., Linear Electric Actuators and Generators, Cambridge University Press, Cambridge, U.K., 1997.)
The primary resistance per phase:
R1=2ρCo(lstack+lec)jcorw21w1I1r(5.1)
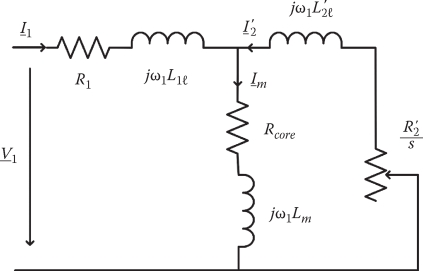
FIGURE 5.2 Low-speed equivalent circuit per phase.
Primary leakage inductance:
L1l=2μ0pq1((λs1+λdiff1)lstack+λec1lec)w1(5.2)
Slot specific (nondimensional) permeance:
λs1,2=hs1,2(1+3β)12bs1,2+hsp,sbsp,s(5.3)
Airgap leakage specific permeance:
λdiff1,2≈5Kcg/bsp,s5+4(Kcg/bsp,s)(5.4)
Primary end-coil leakage specific permeance:
λec1=0.3(3β−1)q1(5.5)
The magnetization inductance:
Lm=6μ0(Kw1w1)2τlstackπ2Kcgp(1+Kss)(5.6)
Secondary resistance (referred to primary):
R′2=12ρAl(Kw1w1)2Ns2(lstackAs2+2lladAlad)(5.7)
Ns2 is the secondary slots/primary length.
Secondary leakage inductance (referred to primary):
L′2l≈24μ0lstack(λs2+λdiff2)(Kw1w1)2Ns2×(1+Kladder)(5.8)
with
Alad=As22sin(αes/2); αes≈2πpNs2; llad≈2pτNs2; As2=hs2⋅bs2(5.9)
Other symbols in (5.1) through (5.9) are as follows:
lstack—primary (and secondary) stack width
g—mechanical gap
Kc—Carter coefficient for dual slotting
lec—end-coil length per side; lec ≈ ∼0.01 + 1.5y (y-coil span); β = y/τ = 1 or 5/6 etc.; τ—pole pitch
Note: Similar expressions are valid for Al-on-iron, with g + dAl instead of g, dAl—aluminum thickness such as Ns2As2=2pdAlτ; ρAl is augmented by the edge effect coefficient Ktr > 1 and reduced by the contribution of solid back in thrust; the magnetic saturation factor Ks accounts for secondary back iron and primary teeth and back-iron contribution to magnetization current (Chapters 3 and 4).
3. Primary sizing
For start we lump by coefficient Kl2 the secondary leakage inductance (L′2l) influence, and thus the airgap flux density (3.24) is
Bg1=μ0Ke=μ0J1mπτgKc(1+Ks)√1+s2Ge2=μ0θ1mgKc(1+Ks)√1+s2Ge2(5.10)
with the primary mmf/pole θ1m (as for rotary IMs)
θ1m=3√2(Kw1ω1)I1πp(5.11)
and
(Gei)=ω1Lm/(R′2⋅Kl2)≈μ0ω1τ2σAlhs2(1−bs2/τs2)π2gKc(1+Ks)Kr⋅Kl2 Kr=1+LladAlad⋅As2lstack; Kl2=√1+(ω2L′2lR′2)2(5.12)
Kl2 is assigned an initial value (1.2 ÷ 1.0).
As demonstrated in Chapter 4, the maximum thrust per primary mmf (or I1) is obtained for SnGe = 1. Let us consider this condition fulfilled for rated thrust when Bg1k=0.7 T:
Bg1k=μ0θmmgKc(1+Ks)√1+12=0.7 T(5.13)
Assuming, realistically, that Kc ≈ 1.25, Ks ≈ 0.4 with g = 1.0 mm, the rated primary mmf θ1m per pole is
θ1m=0.7×1.0×10−3×1.25×1.4×1.411.256×10−6=1.375⋅103 A turns/pole(5.14)
For q1 = 2, y/τ = 5/6 the primary winding factor Kw1 yields
Kw1=sin(π/6)q⋅sin(π/6q)⋅sin(π2⋅yτ)=0.52×sin π/12×sin(56⋅π2)=0.933(5.15)
The lower limit of the number of poles is 2p = 6, to reduce static end effect (phase currents asymmetry) and preserve the low dynamic end effect condition.
Approximately
w1I1=θ1m⋅πp3√2Kω1=1.375×103×π×33√2×0.933=3.28×103 A turns/phase(5.16)
Let us consider lstack/τ = 2 to reduce end-coil length influence in copper losses, and, with a rated specific thrust fxn = 0.88 N/cm2, we obtain the primary active area Ap:
Ap≈2pτlstack=2pτ2(lstackτ)=Fxnfxn=5000.88⋅104=0.05682m2(5.17)
From (5.17), τ = 0.069m.
The primary slot pitch τs=τ/6 = 0.069/6 = 11.5 × 10−3 m. To avoid excessive magnetic saturation in the primary tooth width, bs1/τs=0.55, and thus bs1 = 6.32 × 10−3 m. Envisaging good efficiency, we may choose the secondary frequency at maximum thrust/current (sGe = 1) to be f2r=4 Hz, not smaller, to avoid severe noise and vibration at start (when f1 =f2r) and to reduce secondary winding losses.
From (5.12)—with Gei=1 at ω1 = ω2r=2π f2r—the secondary slot useful height hs2 is obtained:
hs2=1×2π×1.0×10−3×1.25×1.4×1.1×1.51.256×10−6×2π×4×0.0692×3.2×107×0.45=13.16×10−3m(5.18)
The primary length is as follows:
(2p+1)τ=7×0.069=0.483m(5.19)
The active primary slot area is, thus, Aps:
Aps=w1I1pqjcor⋅Kfill=3.28×1033×2×4×106×0.60=227mm2(5.20)
The slot filling factor is Kfill=0.6, because slots are open and thus preformed coils are inserted.
Now, with bs1 = 6.32 × 10-3 m, the active primary slot height hs1 is
hs1=Apsbs1=226mm26,32mm=35.8mm(5.21)
The slot aspect ratio is rather high (bs1/hs1 = 5.67) but, eventually, still acceptable for a reasonable power factor of SLIM.
The peak normal force FnK, of attractive character, as the secondary slots are semi-closed, is approximately
FnK=B2g1K2μ0⋅2pτlstack=0.72×0.483×0.1382×1.256×10−6=13kN(5.22)
The thrust is only 500 N and thus the ratio FnK/Fxn = 26/1. If the total mover (table) weight is lower than FnK, it is feasible to reduce Bg1 by a larger secondary frequency at Fxn, at the price of higher peak current and total winding losses:
Fx≈3I21R′2sGe2τf1(1+(sGe)−2)(5.23)
For sGe = 1 and, with Ge = ω1Lm/R′2 Kl2, (5.23) becomes
Fxn=3π2τI21nLmKl2(5.24)
From (5.6) Lm is
Lm=6×1.256×10−6×0.069×0.138×0.9332π2×1.25×1.0×10−3×3×1.4⋅w21 =0.804×10−6×1.5×w21 =1.2067⋅10−6w21(5.25)
The rated thrust (at snGe = 1) is now verified:
Fxn=3π2τ(w1I1n)2×0.804×10−6×1.5×11.5 =3π20.069(3.28×103)2×0.804×10−6 =589.7N>500N(5.26)
4. The number of turns and equivalent circuit parameters
Let us remember that f2r=4 Hz, the required speed is ur = 3 m/s, and the pole pitch τ = 0.069 m. Consequently, the primary required frequency f1r is
f1r=f2+ur2τ=4+32×0.069=25.74 Hz(5.27)
The available voltage (RMS value) per phase is approximately
V10≈0.95×V1line/√3=0.95×220/√3=120.81 V(5.28)
The way to calculate w1 is to first prepare the circuit parameters by factorizing them to w21
R1=2ρco(lstack+lec)lcorw21w1I1r =2×2.3×10−8(0.138+1.5×0.069×4×106)3.475×103×w21 =1.2570×10−5×w21(5.29)
To calculate L1l (5.2), λdiff1 and λec1 are (5.3) through (5.5)
λs1=hs13bs1+hspbsp=35.83×6.32+16.32=2.126(5.30)
(open primary slots as bs1/g = 6.32/1.5 = 4.2 is acceptable)
λdiff1=5Kcg/bsp5+4Klg/bsp=5×1.25×1.5/6.325+4×1.5×1.5/6.32=0.2315(5.31)
λec1≈0.3×(3×516−1)×2=0.9(5.32)
L1l=2μ0pq[λs1+λdiff1]⋅lstack+λec1⋅lec⋅w21 =2×1.256×10−63×2[(2.126+0.2315)×0.138+0.9×0.08625]w21 =0.1687×10−6×w21(5.33)
With semiclosed slots in the secondary, the slot pitch τs2=τs1 × 0.9=τ/6 × 0.9 = 0.0069/6 × 0.9 = 0.01035 m, secondary slot width bs2 ≈ 5.5 mm, slot opening bss=2g=3 mm, and hss = 1.5 mm, we may proceed to calculate L2l (5.8) with Kladder ≈ 0.1:
λs2=13.113×5.5+1.5/3=1.2975; λdiff2≈0.15(5.34)
L′2l=24×1.256×10−6(1.2975+0.15)×0.138×0.933240(1+0.1)×w21 =0.144×10−6×w21(5.35)
The secondary resistance ((5.7) and (5.9)) is gradually
As2=hs2⋅bs2=13.16×5.5=72.38mm2; αes=2π⋅pNs2=π×640(5.36)
Alad=As22sinαes/2=72.382×sin(π⋅6/80)≈155mm2(5.37)
llad=2p τ/Ns2=2 × 3 × 69/40 = 10.35 mm, so
R′2=12ρAl(Kw1w1)2Ns2(lstackAs2+2lladAlad) =12⋅0.93323.20×107×40(0.13872.38×10−6+2×0.01035316×10−6)×w21 =1.609×10−5×w21>R1(5.38)
To calculate w1 (turns/phase), we have to introduce the rated w1I1 = 3280 A turns/pole
S=f2/f1=4/25.74=0.155
V1r=I1r[R1+jω1r+L1l+jω1Lm(R′2/s+jω1L′2l)R′2/s+jω1(Lm+L′2l)] =w1⋅(w1I1n)[1.275×10−5+j2π×25.74×0.1687×10−6 +j2π×25.74×1.206×10−6×(16.09/0.155+j2π×25.74×0.144)1.609×10−5/0.155+j2π×25.74×(1.206+0.144)] =w1×(w1I1n)×(79.37+j72.3)×10−6(5.39)
with V1r = 120 V, finally w1 ≈ 327 turns/phase.
The RMS phase current for rated thrust
I1n=(w1I1n)/w1=3.28×103/327=10.02 A(5.40)
The input power P1n is
P1n=3V1nI1ncosφ1n=3×120×10.02×0.707=2596 W(5.41)
From (5.46),
cosφ1n=Re(Ze)|Ze|=79.379.3√2=0.707(5.42)
With core losses neglected (f1 = 25 Hz), the electromagnetic power Pelm is
Pelm=Fx⋅Us=P1−pcu1=P1×66.879.3=2186 W(5.43)
The synchronous speed
us=2τf1=2×0.069×25.74=3.552 m/s(5.44)
So the thrust may be recalculated from
Fx=Pelmus=21863.552=615 N>500 N(5.45)
Note: The difference between the required rated thrust of 500N and the obtained thrust at given current (voltage) and slip frequency is due to the fact that the deteriorating influence of secondary leakage inductance on goodness factor (by Kl2=1.5) was exaggerated, in order to be “on the safe side” in the design.
Now the efficiency ηn is
ηn=FxurP1n=615×32596=0.711(5.46)
Discussion
By choosing a small airgap (g = 1 mm) for a small-speed (3 m/s) flat SLIM with cage secondary, acceptable power factor and efficiency were obtained (η ≈ cos φ1n ≈ 0.7).
To obtain acceptable performance, the thrust density was reduced to 0.88 N/cm2.
Also, the airgap flux density is rather high (0.7 T) for rated conditions (f2n=4Hz)
(f2n=4Hz) , and thus the normal force is very large (26 times larger than the thrust); if the total mover mass is larger than the normal force by partial compensation of weight, a smooth ride can be obtained by placing the primary (mover) below the long (fix) secondary.The rest of the SLIM design is very similar to rotary IM design; for a primary core depth of 15 mm, the total active (copper+iron core) primary weight is about 36 kg. Supposing that the machine-tool table weighs 1500 kg (normal force is 13 kN), with a thrust of 615 N, an acceleration of 0.4 m/s2 can be secured.
Though rather high, the performances here are notably inferior to those of linear PMSMs for similar applications, but the ruggedness of the SLIM and the absence of PMs along the track length make the SLIM less costly and, in a harsh environment, desirable.
To prepare the SLIM for design of the control system, the equivalent circuit parameters are calculated:
R1=12.75×10−6⋅w21=1.363Ω; R′2=16.09×10−6×w21=1.72ΩLm=1.206×10−6⋅w21=0.129 H; L1l=0.1687×10−6×w21=0.01839 HL′2l=0.144×10−6⋅w21=0.0154 H; w1≈327 turns/phase
R1=12.75×10−6⋅w21=1.363Ω; R′2=16.09×10−6×w21=1.72ΩLm=1.206×10−6⋅w21=0.129 H; L1l=0.1687×10−6×w21=0.01839 HL′2l=0.144×10−6⋅w21=0.0154 H; w1≈327 turns/phase Once the primary and secondary winding losses are known (easy to calculate via the equivalent circuit) and the complete geometry of both primary and secondary is known already from the previous equation, the thermal design—strongly dependent on the operation cycle (speed and thrust versus time)—may be approached; thermal design is beyond our scope here; it is, however, somewhat similar to that for rotary IMs.
Again, we left out the Al-on-iron secondary SLIM because the performance (efficiency, power factor, and thrust density) is, in our view, unpractical, despite the small normal force/thrust ratio (2.5 ÷ 3.5/1), which may be advantageous in some light mover weight applications. There are some LPMSMs with passive laminated iron track (such as transverse flux type), which also enjoy small normal force/thrust ratio but at much higher efficiencies, as shown later in the book.
5.3 Tubular SLIM with Cage Secondary
For limited travel (a few meters), and zero normal force applications, with a single-track-long secondary tubular structure to hold the inner cage secondary of SLIM, the tubular configuration may be a practical solution for tables, pumps, or vibrators at a low frequency.
The small airgap (1–1.5 mm) cage (copper/aluminum)-ring-secondary with disk-shape laminations that are provided with radial slits in the back cores, to reduce core losses in the primary (with circular coils in slits) and secondary (Chapter 3) cores, completes a practical topology.
For convenience, a generic configuration is presented in Figure 5.3.
A small part of circumferential length may be sacrificed and used for linear bearings to secure central running of primary through the secondary at the small airgap and speed up to 3–6 m/s. We will proceed as for the flat SLIMs with ladder secondary for similar specifications:
1. Specifications
Rated thrust Fxr=2.5 kN.
Max travel length: 2 m.
Max (and rated) speed: 2 m/s.
Power source: three-phase ac 220 V (60 Hz) line voltage with diode rectifier and PWM voltage source inverter.
Let us add that the maximum outer diameter of the tubular SLIM: Dos ≈ 160mm (say, for an in-pipe pump application, etc.).
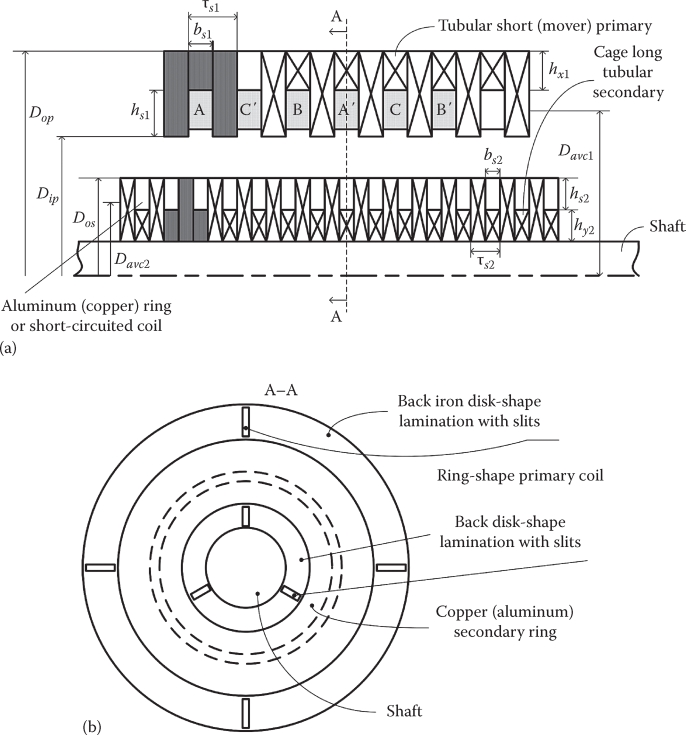
FIGURE 5.3 Tubular SLIM with cage long secondary: (a) longitudinal cross section and (b) transverse cross section.
2. Additional experience-based data
The mechanical (hereby, equal to magnetic) airgap is taken as 1.5 mm, feasible as total radial force is zero or small (when the short primary is eccentrically placed within the fix secondary).
The primary and secondary slots have to be open as the two magnetic cores are made of disk-shape silicon steel laminations, to reduce the costs of core material and fabrication.
Since the slots are open, to keep the Carter coefficient reasonable (and reduce surface core losses due to mmf harmonics and keep the power factor acceptable), the slot openings should not be larger than four airgaps in the primary and three airgaps in the secondary (this is one reason that the airgap is not too small).
As the primary coils are circular in shape, a single full pitch layer three-phase winding with (q1 = 1 as in Figure 5.3 or q′1=2
q′1=2 ) may be easily inserted in slots.As the airgap flux/pole distributes in the primary back iron at a notably larger diameter area, the primary back-iron area radial height (hy1) is rather small; on the contrary, the back-iron radial height (hy2) in the interior secondary is larger than τ/π because the average diameter is smaller than in the airgap zone; in fact, the minimum allowable back-iron secondary interior diameter seems to be the design bottleneck.
The primary coils do not have apparent end connections, and the contact area with the slot walls is large. Consequently, the winding thermal energy transfer is good and the winding temperature is uniform; for complete fairness, we should notice that because the primary is exterior to the secondary, the average coil (turns) length is already larger than the airgap circumference so there is additional coil length (as in flat SLIMs).
Stacking the primary and secondary laminations and coils (with some local holes to exit the coil ends) thus becomes an easy task, very similar to electric transformer standard fabrication practice.
The equivalent circuit, in the absence of dynamic end and transverse edge effect (the secondary cooper rings are flowed by circular currents), is still that of Figure 5.2, and only the skin effect is present, but if inverter fed, f2 < 10 Hz, the skin effect may be neglected. In fact, the tubular SLIM allows for smaller f2 with copper rings, without losing much thrust density (in N/cm2) due the smaller secondary equivalent resistance for the given primary.
3. Equivalent circuit parameter expressions
For further exploration before utilization, Equation 4.36 are presented again here:
R1t=ρCoπDavc1I1rσAlw1⋅jcor⋅2⋅w21=KR1t⋅w21L1lt=2μ0πDavc1pq1⋅2(λs1+λdiff1)w21=K1l⋅w21(5.47)
Factor 2 accounts for the fact that two circular-shape coils mean a “pole pitch equivalent” coil.
Lmt=6μ0π2(Kw1⋅w1)2τπDippgKc(1+Ks)w21=Klm⋅w21L′2lt=2μ0πDavc2⋅12(Kw1w1)2Ns2(λs2+λdiff2)=K2l⋅w21R′2t=ρAl(Co)⋅πDavc2Aring⋅12(Kw1w1)2Ns2=KR2⋅w21(5.47′)
Aring = hs2 · bs2 · Kfill2; Kflll2=0.9 for solid bars and 0.6 for short-circuited copper coils.
The diameters Davc, Dip, Davc2 and the secondary slot area bs2 · hs2 are all visible in Figure 5.3.
4. Pole pitch τmax and its design consequences
The equivalent stack length is here πDip, which for Dip = 80 mm would mean 0.2512 m. The airgap was chosen as 1.5 mm (not 1 mm) to allow large enough slot openings to easily insert the coils and the secondary conductor rings in slots, though it increases the magnetization current and thus decreases the power factor. As a minimum of 40 mm solid-iron shaft is needed to form with the secondary a rigid body, it means that the secondary slot and back-iron height available would be
hs2+hy2=Dip−2g−402=70−2×1.5−402=18.5 mm(5.48)
With hs2 = 8 mm for the secondary slot depth, only 10.5 mm remains for the back-iron height of the secondary. Even neglecting the redistribution of flux density due to the limited length of primary (Chapter 3), and choosing a back core flux density By2max = 1.8 T, the maximum pole pitch τmax would be
πDip=τmaxπBg1max=By2maxπ((Dos−2hs2)2−(Dos−2hs2−2hy2))4(5.49)
with Dip = 80 mm, Bg1max = 0.6 T (not higher here as Dip is rather small) we may calculate the maximum pole pitch τmax:
τmax=1.8×π×(612−302)0.6×80×4=83 mm(5.50)
This is quite a reasonable value for the scope; smaller values would further decrease power factor (via lower goodness factor).
At this pole pitch, the number of slots per pole/phase q1 = 3 to yield a slot pitch in the primary τs1 = τmax/9 = 83/9 = 9.22. The primary slot width bs1 = 5.5 mm < 4g = 6 mm and the primary tooth bt1 = 3.72 mm to secure a maximum flux density in the tooth Bt1max ≈ Bg1max· τs1/bt1 = 0.6 × 9.22/3.72 = 1.48 T (thinner tooth than 3.72 mm may not be mechanically stiff enough, even after proper primary impregnation). With 8 mm deep secondary slots, we have to adopt the secondary slot pitch, which should not be for away from the primary slot pitch (to avoid important torque pulsations, noise, and vibration, as in rotary IMs).
With the secondary slot opening limited to three airgaps (4.5 mm), we may adopt a secondary tooth of bt1 = 4.0 mm.
Now the problem is to avoid any iteration in our preliminary design. To accomplish that, we have to choose the number of poles. Adapting a reasonably larger ftr (for a larger airgap), ftr = 2 N/cm2, the number of poles yields
2p=Fxrftr⋅π⋅D⋅τmax=25002×π×8×8.3≈6(5.51)
From now on, the design methodology follows the same path as for the flat SLIMs, but using the dedicated expressions of parameters.
5. The rated slip frequency f2r
The condition of maximum thrust per primary current is maintained. This means an about 0.707 secondary (airgap) power factor and in general smaller primary power factor, which, due to the large airgap/pole pitch ratio, is natural:
Sr⋅Ge=1(5.52)
Ge≈ω1LmKl2R2; SKl2√1+(ω1L′2lR′2)(5.53)
At this moment, we may calculate L′2l/R′2 as we know all the data on secondary conducting ring, but ω1 is still missing.
From (5.53), the term ω1 is calculated:
ω1LmR′2≈μ0ω1rτ2σAL⋅hs2(1−bt2/τs2)π2gKc(1+Ks) =1.256×10−6×0.0832×3.25×107×8×(1−3.75/9.25)π2×1.5×1.4×1.15×ω1r =0.056×ω1r(5.54)
The saturation factor is taken as Ks=0.15 as the airgap is rather large and the pole pitch is not large; the Carter coefficient Kc ≈ 1.4 (it may be calculated “exactly” as in Chapter 3).
To avoid any iteration, the factor Kl2, which accounts for L′2l, Kl2 ≈ 1.1, from (5.52) to (5.54),
Sr0.056×ω11.1=1
Consequently,
Srω1=1.10.056=19.64(5.55)
Finally
f2r=Srf1=19.642π=3.128 Hz
This is apparently a rather small value for LIMs, but in tubular SLIMs we may accept it because the net radial force is ideally zero so the noise and vibration at start (when f2r =f1 = 3.1278 Hz) will be acceptably low.
As the speed is ur=2 m/s, the primary frequency at rated speed f1r is
f1r=f2r+ur2τ=3.1278+22×0.083=15.176 Hz(5.56)
It becomes evident that the primary rated frequency is only about five times the secondary (slip) frequency, so the efficiency will be below 80%, despite the fact that the core losses may be neglected by comparison with winding losses.
6. The primary phase mmf: w1I1r and primary slot depth hs1
With sGe = 1 and airgap flux density Bg1max = 0.6 T from (5.23)
Bg1max=μ03√2Kw1⋅w1I1rπpgKc(1+Ks)2 =1.256×3×√2×0.925×10−6π×3×1.5×10−3×1.4×1.15×2×w1I1r =0.1080×10−3w1I1r(5.57)
It follows that w1I1r=5555 A turns/phase.
Let us verify quickly if we can obtain the required thrust (5.24):
Fxn=3π2τI21nLmKl2(5.58)
with Lm from (5.47)
Lm=6μ0K2w1π2τπDippgKc(1+Ks)w21 =6×1.256×10−6×0.9252×0.083×π×0.08π2×3×1.5×10−3×1.4×1.15×w21 =1.882×10−6×w21(5.59)
with (5.58) in (5.57) the thrust is
Fxn=3×3.142×0.083×(5555)2×1.882×10−61.1=2925>2500 N(5.60)
It is fortunate that Equation 5.60 leads to a thrust larger than required and thus the design stands (on the safe side). In case the thrust had been smaller, the whole design should have been repeated with a larger outer diameter (and pole pitch, etc.) and a larger number of poles (2p = 8, for example). The rather large specific force (2 N/cm2) “is paid for” by the large phase ampere turns w1I1r, and thus larger primary copper losses, for limited stator slot depth hs1 (to at most 5–6 times the slot width bs1 = 5.5 mm, hs1 = 35 mm).
The phase mmf (in RMS terms) is divided into 2pq slots/phase. So the mmf per slot ncoilI1r is
ncoilI1r=w1I1r×22pq=5555×22×3×3=617.2 A turns/slot(5.61)
(Two circular coils “qualify” for a regular coil with pole pitch τ.)
So the rated current density Jcor is obtained from
hs1=ncoilI1rJcpr⋅Kfill⋅bs1=617.2Jcor×0.5×5.5=35 mm(5.62)
From (5.62),
Jcor=7.833 A/mm2
This current density value is rather high for continuous duty cycle unless forced air cooling is applied, with a primary back-iron depth of 7 mm (it is 10.5 mm in the secondary at a much smaller diameter), mainly because of mechanical rigidity and room to assemble longitudinal bars; the outer diameter is Dop = Dip + 2hs1 + 2hy1 = 80 + 70 + 14 + 2 = 166 mm.
We may now proceed to calculate all equivalent circuit parameters, then the number of turns/phase, wire gauge, and performance (thrust, efficiency, and power factor).
7. Number of turns per phase w1 and equivalent circuit parameters
To calculate the number of turns/phase w1, the equivalent parameter coefficients (5.47) should be computed first:
R1t=ρCoπDavc1I1rw1Jcor⋅2w21 =2.3×10−8×π×0.1165555×7.833×106×2w21 =2.3636×10−5×w21=KR1t⋅w21(5.63)
L1lt=2μ0πDavc1pq1(λs1+λdiff1)w21×2 =2×1.256⋅10−6×π×0.1163×3(2.12+0.112)×2×w21 =2×0.2269×10−6×w21=K1lt⋅w21(5.64)
λs1≈hs23bs2=353×5.5≈2.12; λdiff≈5×1.4×1.5/5.55+4×1.4×1.5/5.5=0.112(5.65)
From (5.47)′,
Lmt=1.882×10−6×w21=Kmt⋅w21(5.66)
R′2t=ρAl⋅πDavc2Aring×12×K2w1Ns2×w21 =3.25×10−8×π×0.06936×10−6×12×0.925258×w21 =3.462×10−5×w21=KR2t⋅w21(5.67)
Aring=hs2⋅bs2=8×4.5=36(5.68)
Ns2=Ns1⋅τs1τs2=6×3×3×9.228.5≈58 secondary slots/primary length(5.69)
L′2lt=2μ0πDavc2×12×K2w1⋅w21Ns2⋅(λs2+λdiff2) =2×1.256⋅10−6×π×0.069×12×0.9252(0.5926+0.158)×w21 =0.066×10−6×w21=K2ltw21(5.70)
λs2≈hs23bs2=83×4.5=0.5936; λdiff2=0.1
We are now using again the equivalent circuit (as in (5.39)) to calculate the number of turns/phase for the max voltage (120 V/phase (RMS)) and f1r = 15.176 Hz, f2r = sr · f1r = 3.1278 Hz:
V1r=w1⋅(w1I1r)⋅|KR1t+jω1rK1lt+jKmt(KR2t/sr+jω1rK2lt)K2Rt/(srω1r)+j(Kmt+K2lt)|(5.71)
120=w1×5555×10−6|18.82+j95.3×0.2269×2+j1.882(34.62/0.2067+j×95.3×0.06)34.62/19.64+j(1.882+0.06)|120=w1×5555×10−6|23.626|+85.97+j127(5.72)
So, w1 ≈ 126 turns/phase. As two coils make a pole-span equivalent coil, the number of turns/slot is
nc1=w1×22pq=2522×3×3≈15 turns/coil(5.73)
So w1f = 135 turns/phase.
The current in the coils (all 18 coils in series) is I1r:
I1r=w1I1rw1=5555126≈44.1 A/phase (RMS)(5.74)
Finally, the parameters of the equivalent circuit are
R1t=KR1t⋅w21=2.3626×10−5×1262=0.375ΩL1lt=K1lt⋅w21=2×0.2269×10−6×1262=0.007204 HLmt=Kmt⋅w21=1.882×10−6×1262=0.02987 HR′2t=KR2t⋅w21=3.462×10−5×1262=0.5496 ΩL′2lt=K2lt⋅w21=0.066×10−6×1262=0.0010478 H(5.75)
Now that the number of turns was reduced from 129 to 126, to maintain the rated current (for given w1I1r=5555 A turns/phase (RMS)), we need to further reduce the voltage per phase to V1rf = V1r · 126/129 = 120 × 126/129 = 117.2 V/phase (RMS); so there is a further (useful) voltage reserve that will probably eliminate the necessity for overmodulation in the PWM inverter for more sinusoidal phase currents.
8. Power factor and efficiency
The power factor is evident from (5.72):
cosφ1=Re(Ze)|Ze¯|=109.596167.00≈0.6(5.76)
To calculate the efficiency, we first have to determine the electromagnetic power Pelm.
Pelm=Fxr⋅Us; Us=2τf1r=2×0.083×15.176=2.5192 m/s(5.77)
But
Pelm=P1−3R1I21r=3V1rI1rcosφ1−3R1I21r =3×117.2×44.1×0.6−3×0.375×44.12=7115 W(5.78)
So the thrust is in fact
Fx=7115/2.5192=2824 N(5.79)
The efficiency is in fact
η1=FxUrP1=2824×29303=0.607(5.80)
Discussion
The required 2.5 kN thrust was surpassed in the preliminary design to 2.824 kN at a specific force of almost 2.4 N/cm2 of primary; this is a rather large value for an LIM.
The power factor is rather good for LIMs (cos φ1 = 0.60); the price to pay for high force density is the lower efficiency, which implies forced air cooling, at least for the primary.
The forecasted 0.37 of η1 cos φ1 product is a fairly good LIM performance for 2 m/s
For given travel length and duty cycle, the temperature of the fix secondary may be assessed by fairly simple equivalent thermal circuit models [5].
For better efficiency at the price of a heavier primary and secondary, the overall Dop and primary bore Dip diameters have to be increased and the design routine has to be repeated (a simple MATLAB®-code would take only a few seconds to do it).
9. Note on optimization design
For low-speed (negligible dynamic end effect) SLIMs with ladder secondary, the optimization design is very similar to that of rotary IMs [6]. Only parameter and performance expressions and the objective function should be adapted for the scope. For medium- and high-speed (transportation) LIMs, the optimization design will be approached in some detail, as there are more notable differences with respect to the case of rotary IMs (Chapter 6).
5.4 Summary
By low-speed LIMs it is meant low (negligible end effect) LIMs ((γ2rτ)−1 < 2p/10, Chapter 3); speeds up to 5–6 m/s in adequate design LIMs may fall into this category.
To raise the efficiency × power factor product from 0.2–0.25 to 0.36, only cage-secondary SLIMs with 1–1.5 mm airgaps are considered.
Only for medium- and high-speed LIMs (Chapter 6), the aluminum-iron secondary will be investigated, in long travel of hundreds of meters to tens and hundreds of kilometers.
The design airgap flux density in ladder secondary, for 1–1.5 mm airgap, low speed (up to 5–6 m/s) should be in the range of 0.6–0.7 T to yield reasonable thrust density (1–2 N/cm2).
In flat SLIMs with cage secondary, the normal (attraction) force is even more than 20 times the thrust and is recommended to be used for the “almost” entire mover (plus load) suspension to relieve the linear bearing of too high mechanical stresses.
In tubular SLIMs, the net normal force is ideally zero, and in up to 1–2 m long travels (even longer) it may be the preferred solution.
For the design of flat (or tubular) low-speed SLIMs, the equivalent circuit of IMs is used with dedicated expressions for the parameters: R1 L1l, Lm, R′2, L′2l; as both cores are laminated, and the secondary frequency is lower than 10 Hz, the skin effect in the secondary conductor rings in slots is moderate, so that only magnetic saturation has some but limited influence (the airgap/pole pitch ratio is not very small, as in rotary IMs).
By design we mean here dimensioning (sizing), that is, to find a suitable geometry for a SLIM of given specifications.
The key design concept used here is the maximum thrust per primary mmf (current), which leads to SrGe=1; this represents a practical compromise between acceptable efficiency and primary weight/thrust.
The slip (secondary) frequency for rated thrust is chosen here (for the case studies in this chapter f2r=4 Hz, respectively, 3 Hz for the flat, respectively tubular, rather medium thrust 500 N (2500 N) and 3(2) m/s).
With a low (0.88 N/cm2) specific thrust, 0.707 power factor and 0.711 efficiency were obtained for the flat ladder-secondary SLIM for 615N at 3 m/s, with a short (mover) primary of about 36 kg; this may be considered competitive performance in some applications where ruggedness and low initial costs are prevalent.
On the contrary, for the tubular ladder-secondary SLIM at 2.4 N/cm2, cos φ=0.6, at 2824 N at 3 m/s for an 0.166 m outer primary diameter (0.08 m inner primary diameter), 0.5 m long primary (about 66 kg short primary weight).
The tubular SLIMs with cage secondary and disk-shape laminations in both primary and secondary cores lead to negligible core losses in most low-speed designs and represent an easy manufacturable topology.
Flat SLIMs with ladder long secondary and short primary are already commercial in some machine-tool table, etc., applications.
Even for low-speed (say, at 5–6 m/s) SLIM designs, dynamic end effect may be accepted by choosing higher goodness factor topologies (higher frequency and pole pitch) when both conventional performance and the deteriorating dynamic end effect rise; but the compromise at optimum goodness factor (Chapter 4)—zero end effect force at zero slip— may end up in better performance; this case is implicit, however, in medium- or high-speed SLIMs design, to be treated in Chapter 6.
Optimization analytical design of low-speed (negligible dynamic end effect) SLIMs is too similar to that of rotary IMs treated here [see Ref. 6].
2(3)D FEM-based direct geometrical design after optimization analytical design should follow, but this is beyond our scope here.
References
1. I. Boldea and S.A. Nasar, Simulation of High Speed LIM End Effects is Low Speed Tests, Proc. IEEE, 121(9), 1974, 961–964.
2. I. Gieras, Linear Induction Drives, Clarendon Press, Oxford, U.K., 1994.
3. I. Boldea and S.A. Nasar, Linear Electric Actuators and Generators, Cambridge University Press, Cambridge, U.K., 1997.
4. I. Boldea and S.A. Nasar, Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001.
5. I. Boldea and S.A. Nasar, Induction Machine Design Handbook, 2nd edn., CRC Press, Taylor & Francis Group, New York, 2010.
6. I. Boldea and L. Tutelea, Electric Machines: Steady State Transients and Design with Matlab, CRC Press, Taylor & Francis, New York, 2009.