
19 Attraction Force (Electromagnetic) Levitation Systems
Attraction levitation systems (ALS) use attraction current–controlled electromagnetic force to control the airgap between fix and mobile mild magnetic cores. Applications for ALS range from magnetic bearings and vibrating tables to magnetically levitated vehicles (MAGLEVs) [1–3].
For MAGLEVs, the primary is placed on board and contains permanent magnet (PM)-less or PM-assisted dc controlled current electromagnets (solenoids) and a solid mild iron fix secondary (track).
On the other hand, for active magnetic bearings and for vibrating tables, the secondary is the mover and is made, in general, from a laminated mild steel core or of a soft magnetic composite (SMC).
In this chapter, we will concentrate on ALS for MAGLEVs, as active magnetic bearing (or bearing-less rotary electric motor) is a field of R&D in itself that deserves a separate treatment.
The following main aspects of ALS for MAGLEVs are treated in what follows:
Competitive topologies
Simplified analytical model (with no end effect) for design
End effect analytical modeling
ALS design methodology and sample performance for MAGLEVs
ALS circuit model for dynamics and control
Open-loop transfer functions of the linearized system
State-space feedback control
Linear parameter varying control
Sliding mode control
Zero power control
Control system performance by example
Collision avoidance
Average control power
Ride comfort
19.1 Competitive Topologies
The most obvious topology of ALS for MAGLEVs comprises C-core (laminated) electromagnets on board of vehicle and C-core (made of solid mild steel) of secondary (track)—Figure 19.1.
The two C-cores of same width Lw allow for a self-centering guidance force when the C-core electromagnets are off-centric; this effect may help the guidance system, which may also be performed with C-core electromagnets.
PMs may be added to the dc controlled electromagnets either in the C-core (Figure 19.2a) or in an Ê-core configuration with dual airgap (Figure 19.2b). Also, the double C-core structure leads to lower eddy currents in the solid iron secondary during vehicle motion and controlled dynamics.
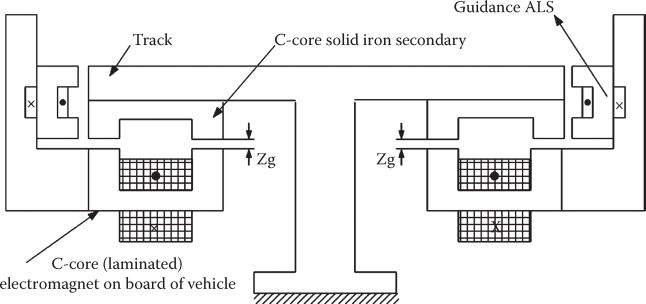
FIGURE 19.1 C-core ALS for MAGLEVs.
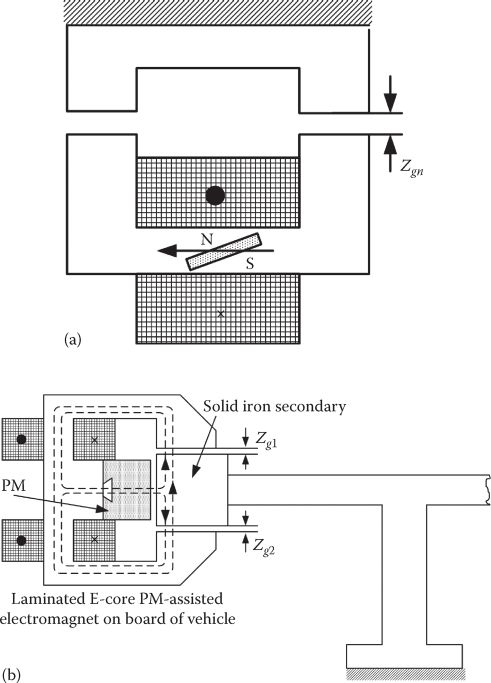
FIGURE 19.2 PM-assisted typical ALS: (a) C-core electromagnet and (b) E-core dual electromagnet.
The PM may be designed to provide for rated airgap Zgn the entire weight of the vehicle (loaded), with the coil current control used for dynamics and control purposes.
In the E-core topology (Figure 19.2), the two twin coils may be potentially controlled together for levitation control only, or separately if both levitation and guidance control is necessary. Rotated by 90°, the configuration in Figure 19.2b may be used for axial active magnetic bearings also.
As the cost of PMs tends to be high and they experience large (or fast) magnetic flux variations, notable eddy currents are induced in them, apparently their use for MAGLEVs may not be the first choice, despite a drastic reduction in control power.
The solid iron secondary core, chosen for economic reasons, leads to eddy currents induced in it due to
Magnetic flux variation during airgap dynamic control (control eddy currents)
Longitudinal end effect at medium and high speeds of vehicle (end effect eddy currents)
In general, however, for MAGLEVs, the frequency band of ALS is less than 25 Hz. Thus, the control eddy currents should not be very large, but, in active magnetic bearings, the frequency band is notably larger and, thus, they should be accounted for.
On the other hand, the end effect eddy currents are related to the limited length of dc electromagnets traveling at a speed U with respect to the solid core secondary track [4–7].
It is a kind of dc linear eddy current brake in the sense that eddy currents are induced at the entry and exit ends; they decay over a certain length. If the speed is large, the decay length may be a good part of the electromagnet length and thus notable flux density and normal (attraction) force Fn reduction occurs. The eddy currents induced by motion also produce a drag force Fd; the drag force has to be accounted for in the propulsion system design for high speeds.
We will first develop a simplified analytical field model without eddy currents and then treat the latter in a subsequent paragraph.
19.2 Simplified Analytical Model
As the core width bi=40–60 (80) mm and the airgap Zg in the MAGLEVs vary from 15 (20) to 8 (10) mm, respectively, in general in interurban and urban applications, the fringing flux (Figure 19.3) has to be considered.
Approximately, the distribution of airgap flux density in the airgap B(z) varies as
B(y)=B0; for 0≤|y|≤bi2(19.1)
B(y)=B0⋅exp(−2(|z|−bi2)g0); for|y|≥bi2
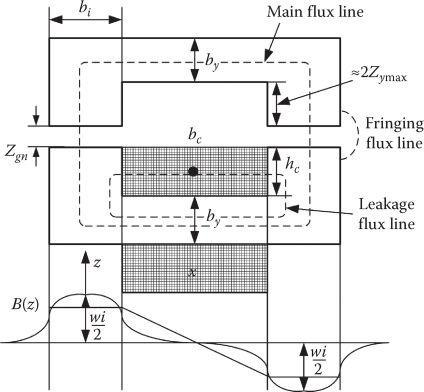
FIGURE 19.3 Airgap distribution along 0y (transverse) axis.
So the average track core flux density Bc is
Bc≅B0(1+2g0bi); B0=μ0Wi2g0(1+Ks(Bav))(19.2)
where g0 is the rated airgap.
In the electromagnet C core, there is also an additional leakage flux density whose average value in the core is Bav:
Bav≈μ0Wi2bc; bc≫2g(19.3)
Only approximately, and because bc ≫ 2g, we may consider that the average iron flux density in the electromagnetic core Biav is (if bi ≈ by1 = by2)
Biav≈Bc+Bav(19.4)
This simplified expression could serve in sizing the core thickness (or width bi = by1 = by2).
The attraction levitation force FL0 is
FL0=2LB 20(1+2g0bi)2.bi2μ0(19.5)
In addition, the electromagnet weight G0 yields
G0=2L[(2(bi+hc)bi+bcbi)γi+WiJcom(1+(bi+hc)π2L)γco](19.6)
where
L is the electromagnet length
Jco is the design current density
γi, γco are the iron and copper (aluminum sheet) mass densities
With a filling factor Kfill = 0.6−0.7, the aluminum-sheet coil cross section bchc is
bchc=WiJconKfill(19.7)
To account for magnetic saturation, we have to consider Equations 19.2 through 19.4 together with the magnetization curve B(H) of the core, applied for Biav in the electromagnet and Bc in the core of the track.

FIGURE 19.4 Coil flux linkage Ψ(i, g) and attraction force FL0 (i, g).
Alternatively, a refined magnetic circuit may be developed for the scope. Typical curves of Ψc(i, Zg) may be obtained (as done for solenoids), together with FL0 (i, Zg)—Figure 19.4.
Magnetic saturation influence is small at higher airgap (say at standstill airgap: Zgmax = 2Zg rated), but it may be important at smaller airgaps (say 0.5Zg rated). In general, during dynamic control of airgap, the latter varies by ±20%–25%, as a compromise between energy consumption and collision avoidance with the track.
The Ψc (i,g) and FL0 (i,g) curve families may be better calculated by finite element method (FEM); 2D (or even 3D) FEM is required for the scope.
Curve fitting Ψc (i,g) and FL0 (i,g) functions by simplified polynomial (or exponential) functions will provide reliable data for dynamics and control studies.
To avoid direct touch between the ALS and the track, a thin nonmagnetic-nonconducting coating is stuck to the electromagnet surface.
A sample approximation is
Ψc≈ci−di2aZg+b+Lli:Ll−leakage inductance(19.8)
FL0=Kf⋅(ci−di2aZg+b)(19.9)
The voltage and motion equations are added to complete the model:
V=Ri+dΨcdt;MdZgdt=−FL0+Mgg+Fext(19.10)
19.3 Analytical Modeling of Longitudinal End Effect
As already mentioned, the limited length (up to 1–1.5 m) electromagnets in motion at speed U, with respect to the solid iron secondary, produce eddy currents in the latter. These eddy currents contribute to a nonuniform airgap flux density in the electromagnet area (0 ≤ x ≤ L) and a drag force Fd. While along the transverse (y) direction—Figure 19.3—the eddy currents are assumed to vary sinusoidally, along the direction of motion the electromagnet mmf and initial airgap flux density is rectangular (Figure 19.5) [6,7].
The airgap should be suddenly increased outside the active zone (0 ≥ x ≥ L) to portray properly the field distributions in the entry and exit zones:
B0(x)≈0for x<0B0(x)=B0for 0≤x≤LB0(x)≈0for x>L(19.11)
The amplitude of the initial flux density B1 is
B1≈4πB0sinπ2Cax=K0B0(19.12)
2C = 2ax = ( bi + 2g ), if the two C-core legs are equal in width: bi.
The eddy currents have in reality two components: one along 0y and the other along 0x (Figure 19.6).
Using Ampere’s and Faraday’s laws, the reaction field of eddy currents, Hy, satisfies the following equation:
∂2Hz∂x2+∂2Hy∂2y−μ0σieUdige∂Hz∂x=0; ∂2Hz∂2y=−(π2C)2Hz(19.13)
di is the reaction field penetration depth in the solid iron secondary (track):
∂2Hz∂x2−μ0σiedige∂Hz∂x−(π2C)Hz=0(19.14)
γ¯12=Cu2±√(Cu2)2+(π2C)2;Cu=μ0σiediUge(19.15)

FIGURE 19.5 Longitudinal model.

FIGURE 19.6 Theoretical eddy current density lines.
Again, 2C = bi + 2g for C-shape cores.
Therefore, the solution to (19.13) with (19.15) is
Hr0(x,y)=A0eγ1xcosπ2Cy,x≤0Hr1(x,y)=[A1eγ1(x−L)+B1eγ2x]cosπ2Cy;0≤x≤LHr1(x,y)=B2eγ2(x−L)cosπ2Cy;x≥L(19.16)
For the low speeds ( U < 10 m/s in general) Cu /2 ≪ π/2C and thus |γ¯1|=|γ¯2|≈π/2C
The integration constants A0, A1, B1, B2 are to be obtained from boundary conditions: continuity of resultant flux density B = B1z + µ0Hr and of ∂Hr /∂x at x=0, L:
B¯1=K0B0(γ¯2/γ¯1)−1;A¯0=B0K0+B¯1+A¯1e−γ¯1LA¯1=−K0B0(γ¯1/γ¯2)−1;B¯2=B0K0+A¯1+B¯1e−γ¯2L(19.17)
At very high speed, B1 may approach −K0B0 and thus A¯1
The harmonics in transverse (0y) direction may be considered by Kyν = (4/πν) sin πν(bi + 2g)/4C instead of K0.
For preliminary calculations, the fundamental along 0y (19.17) suffices.
In Equation 19.13, the reaction field penetration depth is not considered; here we may consider it to be equal to the C-core leg height hc ≈ di, because of the very strong transverse edge effect coefficient K (decreased electric conductivity) and due to longitudinal, Ji, component of current density J0.
As the resultant flux density in the airgap is
Brez≈B0+μ0Hr(x,y)(19.18)
and Hr decreases with x (0 ≤ x ≤ L), the Brez will gradually increase with x from a small value to a larger than B0 value, due to eddy currents field reaction.

FIGURE 19.7 Airgap flux density and eddy current density distribution along 0X due to longitudinal end effect. (After Matsumura, F. and Yamada, S., Elec. Eng. Jpn., 94(6), 50, 1974.)
For b=0.04 m, B0 = 1 T, Bi=0.12 m, zg = 0.015 m, di = 0.025 m, L = 1 m, σ¡ = 3.52 × 106 (Ω m)−1, the distribution of airgap flux density and of eddy current density along x is shown in Figure 19.7 at U1 = 10 m/s and U2 = 100 m/s.
The attraction (levitation) and drag forces Fl, Fd are
Fl≈2μ0bi2+g0∫0dyL∫0[B1z(y)+μ0Hr(x,y)]2dx(19.19)
Fd≈1σiUc∫−c∞∫0di(J 2x+J 2y)dydx(19.20)
Jxdi=ge∂Hr∂y;Jydi=ge∂Hr∂x(19.21)
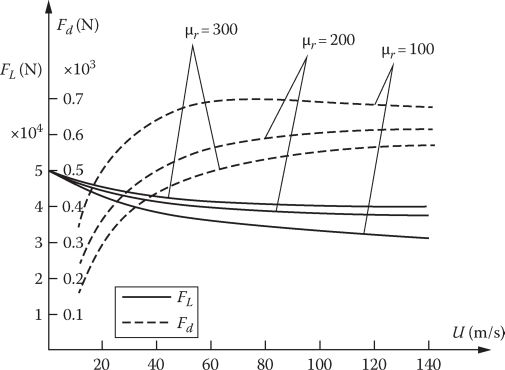
FIGURE 19.8 Levitation, Fl, and drag, Fd, forces versus speed. (After Boldea, I. and Nasar, S.A., Linear Motion Electromagnetic Systems, John Wiley & Sons, New York, 1985.)
For the example in Figure 19.7, the variation of levitation (attraction) force and of drag force, for different equivalent iron permeability, is shown in Figure 19.8.
A notable but not catastrophic decay of levitation force of 25% at 100 m/s and drag force Fd = 17% of acceleration force at 1 m/s2 (0.7 × 103 N), for a mass corresponding to the levitation force 4 × 104 N (4 × 103 kg), are observed.
The ratio (Fi/Fd)†100m/s ≈ 4 × 104/0.7 × 103 = 57.1, which may be called the goodness factor of levitation, is considered good for high-speed MAGLEVs.
19.4 Preliminary Design Methodology
Based on an analytical or FEM-derived model, the design of the ALS starts with the sizing of the dc controlled electromagnets, capable of producing the rated and maximum attraction levitation forces FLr and FLmax for a required Fn/electromagnet weight ratio and for minimum copper losses in the electromagnet for that attraction force (copper loss/normal force).
The two criteria are conflicting, and this is why one was considered a constraint:
FL(N)ggG0(kg)>Klev; Klev=7−15(19.22)
The higher values of Klev correspond to forced cooling (jcon > (6–8) A/mm2), while the smaller values correspond to natural cooling (j = 3–3.5 A/mm2).
Higher current density jcon means not only a smaller coil but also larger copper losses per developed levitation force:
min(PcoFL)is desired(19.23)
In addition, the guideway solid iron secondary (for levitation) has to be limited in weight (cost), and thus the total C-core electromagnet (and secondary) width is 2bi +hc < 0.3–0.35 m (there are two such secondary cores, one on each side of MAGLEVs). In a simplified form, this leaves room, for a given rated airgap Zg to investigate the electromagnet length L versus width bi (C-core leg width).

FIGURE 19.9 Electromagnet mass to length L, levitation force/unit length, for jcon=3 A/mm2 and jcon = 15 A/mm2, versus C-core leg width d_i (a); recalculated mass with longitudinal end effect at 100 m/s (b). (After Matsumura, F. and Yamada, S., Elec. Eng. Jap., 94(6), 50, 1974.)
Let us continue the numerical example of Figures 19.7 and 19.8 and obtain, by using the simplified model in the previous paragraph, the results in Figure 19.9.
A visible increase in electromagnet weight is required to maintain the levitation force Fn=5 × 104 N, to counteract the longitudinal end effect at v = 100 m/s.
When the C-core leg width is reduced, the cost of the track is reduced and also the electromagnet length L is increased; so the end effect influence is reduced. Values of L around 1.5 m are typical for high-speed MAGLEVs.
19.5 Dynamic Modeling of ALS Control
The single electromagnet guideway subsystem is presented in Figure 19.10.
It has only one degree of motion freedom along z (vertical) direction.
A MAGLEV involves multiple motions. But using secondary and tertiary mechanical suspension systems between the electromagnets and the bogie and between the latter and the passenger cabin, enough decoupling is obtained to allow for separate (decentralized) robust control of each electromagnet.
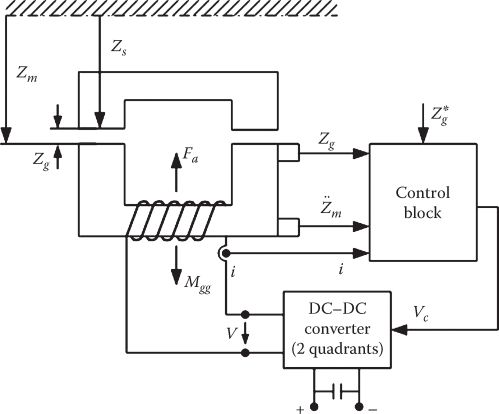
FIGURE 19.10 Single electromagnet-guideway system.
For stable levitation, the airgap Zg is maintained close to the reference value Zg*, within 20%–25% dynamically, in the presence of quite a few perturbations like external forces Fext (from additional weight or wind forces) and guideway irregularities (from Zs), such that a reasonable degree of ride comfort is secured for reasonable specific energy consumption (average kW/ton and peak kVA/ton).
To choose the input vector of variables, let us introduce here again the complete set of single electromagnet-guideway system equations:
V(t)=Ri(t)+˙ψ(t)Ψ(t)=L(Zg,i)*i(t)
Wm(t)=Ψ∫0idΨ; Wcom=iΨ−Wm(t)(19.24)
FL=−∂Wm∂Zg|Ψ=ct=∂Wcom∂Zg|i=ct
M¨Zm=Mg−FL+Fext; Zm=Zs+Zg(19.25)
It should be noticed that the motion equation now refers to the absolute acceleration Zm and not to Zg, because the guideway irregularities (visible in Zs) are accounted for.
Using the approximations in (19.8) and (19.9),
Ψ=ΨZg+Lli; ΨZg=ci−di2azg+b(19.26)
Fe≈Kx⋅Ψ 2Zg(19.27)
Ll is the leakage inductance of the electromagnet, considered independent of current i and position Zg.
As visible in Equations 19.24 through 19.27, the single electromagnet guideway subsystem is nonlinear.
Linearization is used to pave the way for practical control system design.
For linearization,
V=V0+ΔV;ψ=ψ0+Δψ; i=i0+Δi; FL=FL0+ΔFL; Fext=Fext0+ΔFext Zq=Zg0+ΔZg;Zm=Zm0+ΔZm; Zs=Zs0+ΔZs(19.28)
Finally,
ΔV=RΔi+αiΔ˙i+αgΔ˙Zg; αi=∂Ψ∂i|0; ∂Ψ∂Zg|0 ΔFL=βiΔZg; βi=∂FL∂i|0; βg∂FL∂i|0 MΔ¨Zm=−ΔFL+ΔFext ΔZm=ΔZs+ΔZg(19.29)
⪻ Zs (t )—for guideway irregularities—is considered given.
The coefficients αi, αg, βi, βg are calculated at the steady-state point characterized by V0,i0,Ψ0,FL0,Fext0,Zg0,Zm0
The structural diagram of the linearized model (19.28) and (19.29) is portrayed in Figure 19.11a, with Δi as the electrical variable.
A similar linearization is possible with ΔΨ instead of Δi as the electrical variable (Figure 19.11b) with
αψ=∂i∂Ψ|0;βΨ=∂FL∂Ψ|0;αgx=∂i∂Zg|0;βgx=∂FL∂Zg|0(19.30)

FIGURE 19.11 Linearized system with (a) Δi and (b) ΔΨ as the electrical variable.
Again, the coefficients αΨ, βΨ, αgΨ, βgΨ depend on the linearization point. It has been demonstrated that, being related to magnetic flux, which determines the levitation force irrespective of airgap Zg0, they should vary less with Zg0 in comparison with the coefficients for Δi as electric variable [11].
The problem is that, in general, the current may be measured (and controlled) easier than the flux linkage Ψ, especially at steady state (dc).
As the dynamic errors, introduced by linearization, depend heavily on the linearization point (Zg0, FL0, i0...), especially with Δi as variable, when the linear control system is adopted, the latter is to be adaptive for MAGLEVs, where the airgap varies, at least at vehicle lift off and landing, by its rated value.
The structural diagrams suggest three possible state vectors:
ΔX1¯=|ΔZgΔ˙ZgΔi|;ΔX2¯=|ΔZgΔ˙ZgΔ¨Zm|;ΔX3¯=|ΔZgΔ˙ZgΔΨ|(19.31)
The output vectors for the three situations are
ΔZgΔi|=|100001|ΔX1,2,3¯ΔZgΔ˙Zg|=|100001|ΔX2,1,3¯ΔZgΔΨ|=|100001|ΔX3,2,1¯(19.32)
From the structural diagrams in Figures 19.11a and b, we get state equations:
Δ˙X1=A1ΔX1+B1ΔV+C1|ΔFextΔ¨Zs|Δ˙X2=A2ΔX2+B2ΔV+C2|ΔFextΔ˙FextΔ¨Zs|
Δ˙X3=A3ΔX3+B3ΔV+C3|ΔFextΔ¨Zs|(19.33)
The state variables have to be measured or some of them are to be estimated. In our case, Zg may be measured by dedicated sensors; ¨Zm
The flux is not easily measurable, especially at steady state (dc), but Hall sensors with low temperature sensitivity could solve the problem.
However, Żg (even ¨Zg
Now if we calculate the transfer function between the airgap deviation ΔZg(s) and the input voltage ΔV(s), for zero external force and guideway irregularity perturbations (ΔFext (s) = 0, ΔZs(s) = 0) is of the form
ΔZgΔV(s)=−ΔV(R+sαi)((s2M/βi)+βg)+αgs(19.33a)
It may be demonstrated that some roots of the denominator of Equation 19.33 have positive real parts at any linearization point (by the signs of αi, βi, αg, βg), and thus the open-loop voltage-fed system is not stable; even for controlled constant current, the system would be unstable.
The decrease in the levitation force with airgap increase is a strong phenomenological explanation for this.
As the system is statically and dynamically unstable, its forced stabilization is required.
19.6 State Feedback Control of ALS
Let us control the ALS linearized model with ΔX¯2=[ΔZg,Δ˙Zg,Δ¨Zm]T
Δ˙X¯2=AΔX¯2+B¯ΔY¯2+P¯2ΔZ¯2(19.34)
From (19.28 and 19.29),
A¯=|010001−βg/M−(βg−βiαg/αi)/M−R/αi|;B=|00−βg/Mαi|;P2¯=[00000−1R/Mαi1/M0](19.35)
Though the control system should be adaptive, we hereby deal with it for one linearization point, only. The procedure may be repeated for a few critical situations and then the control law may use adaptable coefficients:
ΔV=KgΔZg+KuΔ˙Zg+KaΔ¨Zm=KT¯ΔX2¯(19.36)
such that integral squared criterion is minimum:
I(ΔV)=12∞∫0[q 2gΔZ 2g(t)+q 2aΔ¨Zm(t)+Δu2(t)]dt(19.37)
The control coefficients Kg, Ku Ka will depend on qg and qa in (19.37).
The optimum criterion (19.37) aim to
Reduce the airgap deviations (ΔZg) to avoid electromagnet-guideway collisions
Reduce absolute acceleration (¨Zm)
(Z¨m) for ride comfortReduce control power (by ΔV)
The control law is obtained from the known equation:
K¯T=[KgKuKa]T=−R¯−1B T2P¯=−b′[P13P23P33]T(19.38)
R¯=[1],b′=−βMαi,P⇁=[p11p12p13p12p22p23p13p23p33](19.39)
Matrix P is the solution of the Riccati equation:
P¯A¯2+A¯T2P¯−P¯⋅B¯⋅B¯TP¯=−Q¯, Q¯=diag[q 2g,0,q 2a](19.40)
With known Q¯
To determine Q¯
K 2g+2a1bKg=q 2g(19.41)
K 2a+2a3b′Ka+2b′Ku=q 2a−2a3b′Kg−2a1b′Ka−2KgKa+2a2b′Ku+K 2u=0
with
a1=−βgRMαi;a2=−βgMTdRαi;a3=−Rα1;Td=Rαi+βiαgβgR
Through an algebraic stability criterion,
Kg>2Kg0(ka−ka0)(ku−ku0)+(Kg−Kg0b′)≥0(19.42)
where
Kg0=βgRMαib′; Ku0=−βgRTdαiMb′; Ka0=−Rb′αi(19.43)
Also, the amplifiers have limits: Kg ≤ Kgmax; Ku < Kumax; and Ka < Kumax.
The system (19.41) has to have real solutions: Kg, Ka, Ku and thus qg and qa have to be chosen carefully in a domain. As the vehicle weight varies from unloaded mass (M1) to loaded mass M2, the qa, qg domain has to yield practical solutions for both situations.
For control implementations, we should notice that Zg and Zm are measurable, but Żg is not.
So an observer for Żg is required.
The control scheme with a state observer is illustrated in Figure 19.12 [11].
The Zg observer in Figure 19.12 solves the problem of system behavior with respect to guideway irregularities.
It implies only the choice of Sob = −β0 pole since
ˆ˙Zg(1)=¨Zm(1)s+β0+sβ0s+β0˙Zg(s)(19.44)
For an ALS with the data M=200 kg, Zg0 = 10−2 m, T = αi/R = 0.053 s, R = 1.532 Ω, βi = 236 N A−1, −βg = 9 × 105 N m−1, results as in Figure 19.13 are obtained.
It is evident that without the adopted Zg observer the system cannot tolerate force and track irregularity perturbations.
To further improve the performance, an integral of airgap error may be added to the control law to secure zero steady-state airgap error. Also an additional interior current loop may be added to limit the current and quicken the response.
A two-quadrant dc-dc converter (±Vmax) is needed for quick enough control of MAGLEVs.
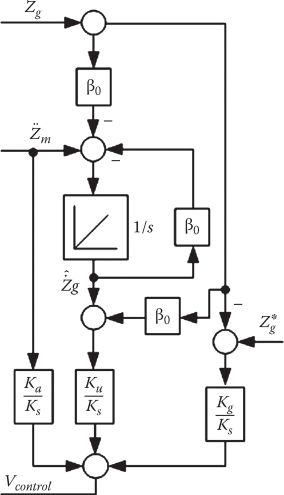
FIGURE 19.12 Control system with Zg observer (Ks: dc–dc converter gain).
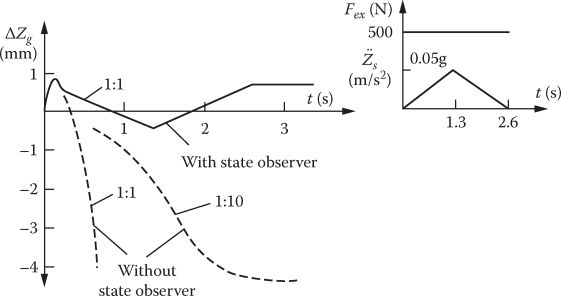
FIGURE 19.13 Control system response to external force Fext and ¨Zm
19.7 Control System Performance Assessment
The control system performance for MAGLEVs is related to
Electromagnet-guideway collision avoidance
Average control power
Ride comfort
For active magnetic bearings, in some applications, the maximum (or average) dynamic deviation of the airgap is limited to a small fraction of the rated airgap (when applied for machining purposes); ride comfort is not considered for active magnetic bearings but noise and vibration are.
To assess this performance, the following transfer functions of the close-loop system are required:
G1(s)=Zg(s)Zs(s)=−[s3+(Rαi+βiKsKaMαis2+KsβiMαi)]D(s)(19.45)
G2(s)=Zg(s)Fext(s)=1M(s+R/Ki)D(s)(19.46)
G3(s)=Zg(s)V(s)=−βiMKiD(s)(19.47)
with
D(s)=s3+(RKi+βiKsKaMαi)s2+(βiKsKaMαi)s+βiKsKgMαi+βgRMαi(19.48)
The guideway (track) irregularities may be described by the power spectral density (PSD):
ϕz(ω):Φz(ω)=AgUω2;U:vehiclespeed;Ag:guideway constant(19.49)
The squared average value of airgap deviations ˉZg
¯Zg=[ω0∫0.2*π|G1(jω)|2ϕz(ω)dω]1/2(19.50)
ω0 is the maximum frequency of irregularities.
ˉZg
The average control power for known guideway irregularities is essential for a competitive system, and, for assessment, it is required first to calculate the voltage and current squared average deviations ¯□V
¯ΔV=[ω0∫0.2*π|G1(jω)G3(jω)|2Φz(ω)dω]1/2(19.51)
¯Δi=[ω0∫0.2*π|G1(jω)*G−13(jω)+(αi−Ll)βi*jωR+jωαi|2Φz(ω)dω]1/2(19.52)
Thus, the average control power Pcon is
Pcon=(V0+¯ΔV)(I0+¯Δi)(19.53)
Finally, the ride comfort may be calculated using the power spectral density concept applied for absolute accelerations, ϕ¨Zm(jω)
Φ¨Zm(ω)=ω4|G1(jω)+1|2Φz(ω)(19.54)
The human comfort level when exposed to a spectrum of accelerations of various frequencies has been quantified based on dedicated studies.
The “Janeway curve” is by now an accepted standard.
To meet the ride comfort standard, the Φ¨Zm(ω)
The higher the speed, the more difficult it is to meet the “Janeway criterion.”
Even if it would be possible to meet the “Janeway criterion” at high speeds (say at Umax = 100 m/s), the energy consumption in the ALS might render the solution unpractical.
Consequently, a secondary (and a tertiary) mechanical suspension system is used on MAGLEVs.
A typical passive system is shown in Figure 19.14.
The secondary suspension system equations are
M¨ZM−Mg−K(ZM−ZS−Zg−l0)−β(˙ZM−˙Zm)(19.55)
where
l0 is the distance between unsprung (ALS) mass m and sprung mass M
K and β are the spring rigidity and damping coefficients when they are unloaded:
Mg=K(ZM0−Zg0−l0)(19.56)
where
ZM0 is the rated height of mass M
Zg0 is the rated height of mass m
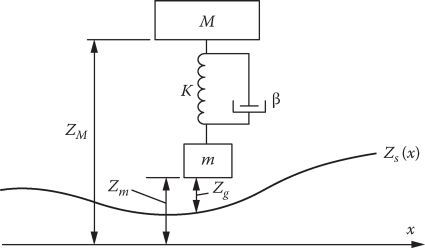
FIGURE 19.14 Passive secondary suspension system. (After Matsumura, F. and Yamada, S., Elec. Eng. Jpn., 94(6), 50, 1974.)
For the mass m, with no spring (the ALS),
m¨Zm=mg+K(ZM−ZS−Zg−l0)+β(˙ZM−˙Zm)−FL+Fext(19.57)
In this case, the problem may be solved as up to now but with ¯Zg
The ride comfort will be checked for Zm ; in general, for a wise use of secondary system m/M < 0.2; a condition that is easily fulfilled by ALSs.
19.8 Control Performance Example
Let us suppose a MAGLEV of 50 ton at 100 m/s with rated airgap Zg0=1.5 × 10−2 m that uses electromagnets that are 1.5 m in length (L) with C = core leg width bi = 0.04 m for a current density jcon = 15 A/mm2 (forced cooling).
Ten electromagnets are used, so FL0 = 5 × 104 N with Wi0 = 3.58 × 104 A-turns, V0 = 200 V, I0 = 200 A, electromagnet weight m=300 kg; coil resistance R = 1 Ω and the rated inductance L (saturation neglected) is L0 = ∝i=0.1 H, βi = 1490 N/A, βg = −1984 × 107 N/m; L=Ψ/i = (2.5 + 1.43/2 g)10−3(H).
Based on the control system design in Section 19.6, for qa = 308 s2/m, qg = 1.65 × 105 V/m, we obtain the state feedback control law coefficients:
Kg=1.8×105V/m, Ku=1.07×104 Vs/m, Ka=340.0 V s2/m
With these values, the transfer functions G1 (s), G2 (s), and G3 (s) of (19.45) through (19.48) are
G1(s)≈−(s3+964.0s2+3.18×104s)D(s)G2(s)≈0.2×10−3s+2.1×10−3D(s)G3(s)≈−2.98D(s)D(s)≈s3+964s2+3.18×104s+4.96×105(19.58)
With welded guideway, the constant Ag (in (19.49)) is Ag = 1.5 × 10−6 m.
From (19.50), the squared average airgap deviation Zg = 4.6 × 10-3 m < Zg0/3 (f0 = ω0/2π = 25 Hz). Therefore, the MAGLEV avoids the collision with the guideway at 100 m/s. However, the squared average voltage and current deviations ˉσV
ˉσV=4690 V; ˉσi=670 A
The average control power is inadmissibly high, and thus a mechanical secondary system is needed.
To do so, we have to reconsider the whole control system design for m = 300 kg (only the electromagnet); finally, with qa’ = 2.73 V s2/m, qg’ = 5.8 × 104 V/m, Kg’ = 7.4 × 104, Ku’ = 5600, Ka’ = 14.8, ˉZ′g
This time the voltage deviation is about 3/1 and current deviation is 1.2/1. Such values are almost acceptable, but, if possible, they should be further reduced by the cabin’s additional suspension system contribution.
The ride comfort has been calculated (19.49) for both situations, and the results are shown in Figure 19.15.

FIGURE 19.15 Ride comfort m = 300 kg, M = 5000 kg. (After Matsumura, F. and Yamada, S., Elec. Eng. Jpn.., 94(6), 50, 1974.)
The secondary system was not introduced in the data in Figure 19.15; only the mass M was decreased to m = 300 kg.
So a secondary (and tertiary) mechanical system is responsible to provide ride comfort for f > 5 Hz.
Vehicle lifting (from Zgmax to Zg0) and touchdown should be controlled by a special sequence, as the linear control system discussed so far may not be stable for such large airgap deviations.
This and other reasons raise the problem of alternative, more robust, control of ALS.
19.9 Vehicle Lifting at Standstill
For a 4 ton MAGLEV [9], similar to the previous, the state feedback control system was used for M = 1000 kg, Zg0=0.01 m, R = 0.7 Ω, i0=47 A, V0=33 V, Ψ0=∝i0=5.20 Wb, Kg=5000.0, Ku = 3263, Ka = 110.0, ω0s = 25 rad/s, and ξ = 0.45.
An additional flux linkage feedback is added to increase stability limits at large airgaps. A search coil voltage with a first-order large time constant delay is used for flux feedback Ψt (Figure 19.16).
Experimental results [9] (Figure 19.17) picturing the vehicle stable lifting (4 ALSs of 1 ton each) from 20 to 12.5 mm, with reasonable voltage and current dynamic profiles, tend to substantiate the benefic role of the flux feedback and of the airgap deviation PI loop, added to provide for ideally zero steady-state airgap deviation error.
The steady-state estimated average levitation control power is about 1.45 kW/ton, while the measured one was 1.54 kW/ton at standstill. As expected, naturally cooled electromagnets have been designed and thus their lift/weight ratio is only 7/1. For urban MAGLEVs (U ≤ 20 m/s), the average control power should in general be not more than two times the steady-state value (at standstill), which means about 3 kVA/ton. This is quite an acceptable value.
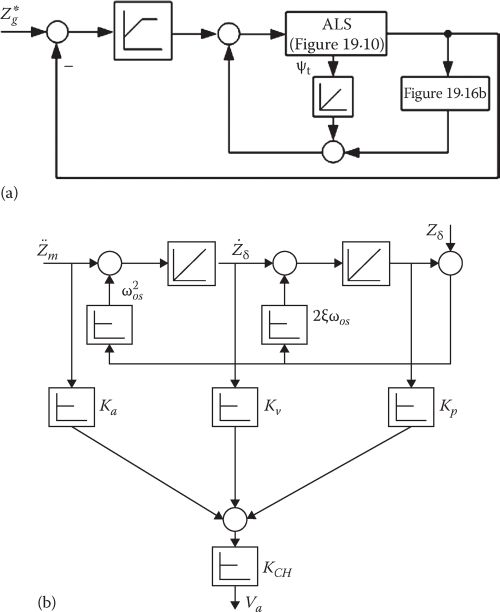
FIGURE 19.16 State feedback control system with additional flux feedback (a); observer (for ˆ˙Zg
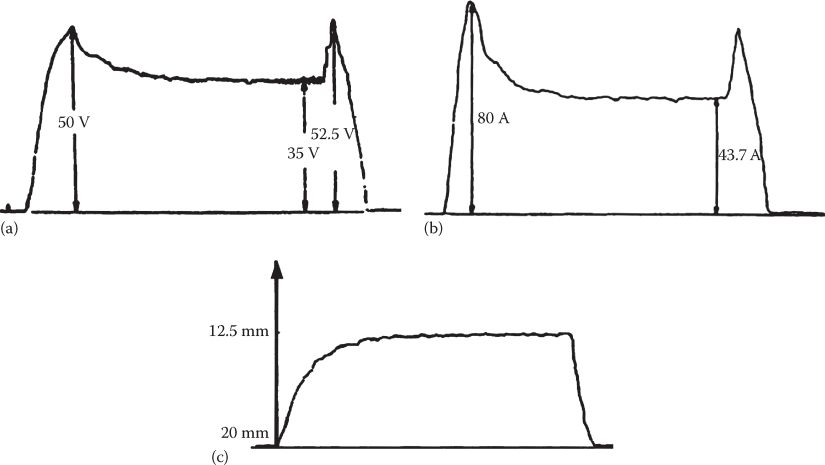
FIGURE 19.17 Experimental lifting of a 4 ton MAGLEV at standstill (4 × 1 ton ALSs): (a) input voltage (single quadrant dc-dc converter), (b) coil current, and (c) airgap (from 20 to 12.5 mm). (After Boldea, I. et al., IEEE Trans., VT-37(4), 213, 1988.)
19.10 Robust Control Systems for ALSs
It is by now evident that the state feedback control is sensitive to the linearization point and, when the airgap varies notably with respect to the linearization point, problems of stability in the presence of force and track irregularity perturbations occur.
To solve this problem, quite a few solutions have been recently proposed (mostly for active magnetic bearings).
Among such methods, we mention the following:
Gain scheduling derived from the linear parameter-dependent control initiated from the controllers defined at the corner of the parameter box [10]
Sliding mode control [11], which is known for its robustness to perturbations and parameter detuning; a sliding mode functional σ (Zg,˙Zg,¨Zg)
(Zg,Z˙g,Z¨g) is first chosen:σ(Zg,˙Zm,¨Zm)=(Z*g−Zg)+Tsˆ˙Zg+TsTsm˙Zm(19.59)
σ(Zg,Z˙m,Z¨m)=(Z∗g−Zg)+TsZ˙ˆg+TsTsmZ˙m(19.59)
Ts is first to be imposed; in general Ts is smaller than the smallest time constant of the system. Then, Tsm has also to be chosen. The second-order functional σ (Zg,˙Zg,¨Zg)
The stability of SM control system is a problem in itself and may be treated in many ways but preferably (yet) by the Lyapunov method [11,12].
The control law is rather simple and may take the form [11]
V(t)={+Vmax;σ(Zg,˙Zg)>hKRσ(t)+1Ti∫σdt;|σ|<h−Vmax;σ(˙Zg,˙Zg)<−h(19.60)
Here, ±Vmax are the positive and negative maximum output voltages of the dc-dc converter that supplies the ALS.
Close to the target (|σ| < h), a PI controller over the SM functional is used to reduce chattering around the target. The parameters KR and Ti have to be determined in the design process and have to be estimated as done for state feedback control systems.
But the PI system, which acts close to the target in corroboration with the term TsTsm¨Zm
To eliminate this perturbation, Tsm = 0 in (19.59), which becomes
σs(Zg,˙Zg)=ˉZ*g−Zg0+Ts˙Zg(19.61)
But now, to reduce the perturbation influence, the SM control is cascaded with an interior fast (bipositional) current loop.
Typical results with such a system are shown in Figure 19.18 [11].
The airgap varies in Figure 19.18a from 0.03 to 0.01 m and, respectively, to 0.005 m. The response time is about 0.2 s. The perturbation rejection looks very good, and this is due to the fast current (bipositional) loop response; ¨Zs
The fast current and force responses (Figure 19.18b) are evident. The high-frequency oscillations in the current loop are visible in force also, but they are limited and may be handled by standard insulate gate bipolar transistor (IGBT) dc-dc converters.
Moreover, the current fast (PD) current loop reduces the system to one of second order.

FIGURE 19.18 SM + current control: (a) airgap, ˙Zg¨Zm¨Zs

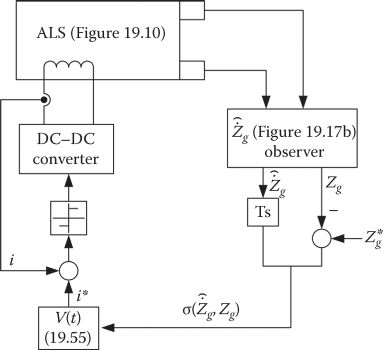
FIGURE 19.19 SM + PI + current control system.
Note: Though the absolute acceleration ¨Zm
Therefore, the SM + PI + current loop control system looks as in Figure 19.19 (For more on SM control, see Ref. [12]).
It appears that such a simple control system is very robust. It remains to be seen if the rather increased maximum voltage Vmax is acceptable for the application.
State feedback control with current change rate feedback of dual-sided ASL system (for linearization of levitation force with current and airgap) applied to an active magnetic bearing was shown to produce sensorless airgap control [13].
The dual ALS for suspension together with one for guidance for MAGLEV transportation industrial platform is proportional integral derivative (PID)-fuzzy adaptive controlled differentially in a master-slave solution with I0 ± i [14] (Figure 19.20a and b).
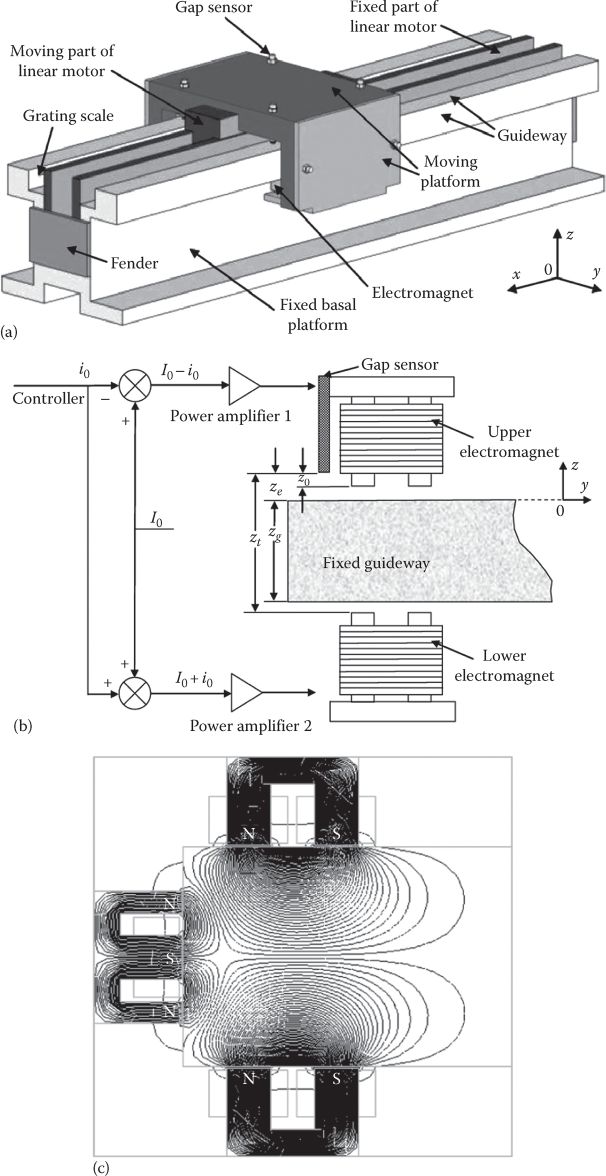
FIGURE 19.20 MAGLEV industrial transport platform: (a) framework, (b) control system for levitation (vertical motion), (c) optimized geometry for levitation (vertical motion) and guidance (lateral motion). MAGLEV industrial transport platform: (d) six airgaps evolution during MAGLEV motion. (After Li, L. et al., IEEE Trans., MAG-40, 3512, 2004.)

Airgap eddy current sensors with 0.1 μm resolution are used.
Another dual PM-assisted ALS (intended for axial active magnetic bearings Figure 19.2b) has been shown to produce a resultant attraction force FL proportional to current and displacement from middle position, which makes it easier to control:
FL=KiI+KxX(19.61a)
over the entire airgap range [15].
19.11 Zero Power Sliding Mode Control for PM-Assisted ALSs
As shown in Figure 19.2a and b, PM-assisted ALS may also be considered (Figure 19.21).
The control of such a system is similar to that of dc controlled ALS presented so far, but here quite a different approach is taken for the description of the four operation modes to be handled, integrated by ALS:
Smooth takeoff with switching to zero power control afterward.
Zero control power levitation: The steady-state control coil current is maintained to zero even with payload variation, but the targeted airgap will now vary such that the PM alone may produce the whole levitation force.
Guideway collision avoidance control takes over and controls the system at minimal airgap.
Soft landing is provided by planned airgap versus time reference tracking control.

FIGURE 19.21 PM-assisted ALS.
For zero power (current) control, sliding mode control is adopted for robustness, but first one new row is added in the state-space model, which contains ∫∆idt [16]:
|ΔZgΔ˙Zg∫ΔidtΔi|=|0100a210+Δa2100a240+Δa2400010a420+Δa420a440+Δa44||ΔZgΔ˙Zg∫ΔidtΔi|+|000b|ΔV+|0d0b|Fext+|0100|¨Zs|A|=|A0|+|ΔA|(19.62)
and
a210=1M∂FL∂Zg|0,a240=1M∂FL∂i|0,a420=−w1∂Φ∂Zg|0,a440=−RL0,b=1L0,d=1M(19.63)
where
L0 is the coil inductance at rated airgap
M is the ALS mass
R is the coil resistance
Zm is the track irregularities acceleration
The similarity with previous paragraphs (19.6) is strong; just a new row is added.
A sliding hyperplane σ, its reaching law σ, and the control law ΔV are defined as [16]
σ=C¯⋅X¯;C¯=[C1C2C1K,1];X¯=[ΔZg,Δ˙Zg∫Δidt,Δi]T(19.64)
with
˙σ=−pσ−qsign(σ)(19.65)
and
ΔV=(C¯b−1)(−C¯A0X¯−pσ−qsign(σ))(19.66)
If the system characteristic on the hyperplane is chosen as [16]
CF(s)=(s+tωn)(s2+2ξωns+ω 2n)(19.67)
then the parameters of the control law C1, C2, and K may be calculated as
C1=2ξω 2n+ω 2n+a210a240C2=(tωn+2ξωn+tω 3n)/a210a240K=−tω 3na210⋅c1(19.68)
For stability, not only p > 0 and q > 0 in (19.65) [17], but also the external force is estimated as
ˆFext=M⋅a210⋅K∫Δidt(19.69)
From the existence condition of the sliding hyperplane, σσσ < 0, the values of p and q are obtained as
p>sup|C¯ΔA+¨Zsσ|>0q=|c2a210K∫Δidt|>0(19.70)
On a 25 kg empty vehicle in Ref. [16], a 12 kg payload is added and the airgap response is shown in Figure 19.22.
It is now evident that the steady-state current is driven to zero after the airgap is reduced from 9.00 to 6.5 mm (such that the PMs alone can handle the entire larger levitation force).
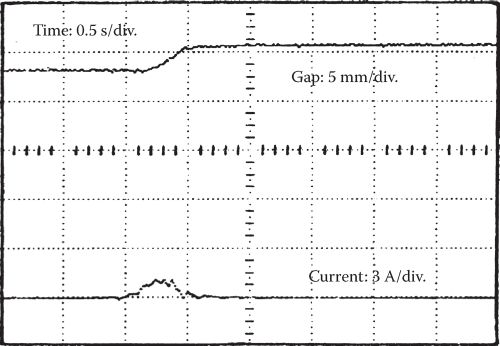
FIGURE 19.22 Airgap and current response for 12 kg payload addition (to 25 kg dead weight).
For vehicle takeoff and soft landing, as well as operation at minimum airgap safety rides, the airgap tracking mode should be initiated.
This time the state space model gets an additional state of ∫ΔZ′g
Δi−T∫ΔZ′gdt→0(19.71)
The state space vector is similar to that mentioned previously, that is, X¯=[∫ΔZ′gdt,ΔZg,Δ˙Zg,Δi]
Reference [16] shows a typical planned soft takeoff and landing (Figure 19.23).
Also Figure 19.23c shows minimum (safe) airgap tracking control for maximum overload (additional 25 kg for 25 kg dead weight).
The control performance is evaluated as done previously in this chapter with respect to rms airgap variation, average control power, and ride comfort ((19.45) through (19.48)), only to find that ˉZg/Zg0
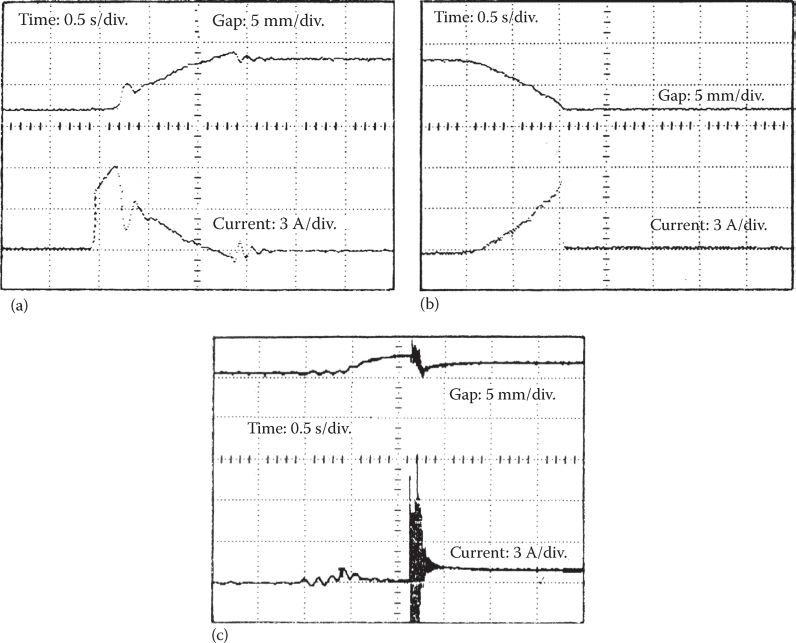
FIGURE 19.23 (a) Takeoff from 14 to 9 mm, (b) soft landing, and (c) overload (25 kg payload) operation at minimum airgap (5 mm). (After Tzeng, Y.K. and Wang, T.C., Analysis and experimental results of a MAGLEV transportation system using controlled—PM electromagnets with decentralized robust control strategy, Record of LDIA–1995, Nagasaki, Japan, pp. 109–113, 1995.)
19.12 Summary
ALS provide stable equilibrium of an electromagnet below a mild steel body, at a reference distance by active control of the current in the electromagnet; an ALS uses electromagnetic attraction force as expressed in Maxwell tensor.
ALS applications range from magnetic bearings through industrial platforms to vehicular MAGLEVs (at medium and high speed).
The primary electromagnet may be provided also with a PM when the current control in the electric coil serves mostly for airgap control.
For PM-assisted ALS, it is feasible to operate at variable airgaps when the payload increases such that only the PMs provide the steady-state levitation force when the steady-state current is zero; nonzero current occurs only during transients; this is called zero current (power) control.
In MAGLEV vehicle applications, the secondary of an ALS is made of solid iron for economic reasons. However, during control and vehicle motion at high speeds, eddy currents are induced in the solid iron secondary/track. These eddy currents reduce the levitation force FL0 and produce a drag force Fd; both have to be calculated and considered in the design of ALS for medium-/high-speed MAGLEVs (20–100 m/s).
The design of ALS starts with the specifications of FL/ALS weight, rated voltage, current, speed, and secondary width LW interval and calculates essentially the electromagnets number, length L, and C-core leg width bi.
Then, after a first geometry is obtained, longitudinal end effects on FL and Fd are calculated at maximum speed; the design is corrected iteratively until the value of FL is the desired one, with end longitudinal effects considered.
It has been shown that even at 100 m/s, the normal force is reduced only by about 25% and the drag force corresponds to 0.1 m/s deceleration of the vehicle due to longitudinal end effects. So ALSs are suitable for high-speed MAGLEVs.
The copper losses per levitation force (or vehicle weight) is another performance criterion to be checked; 3–4 kW/ton at 100 m/s is considered reasonable and ALSs are capable of that, but only if a secondary mechanical suspension system is added; for full comfort a tertiary (cabin) mechanical suspension system is used.
The state space equations of ALS are nonlinear; after linearization they prove to correspond to a statically and dynamically unstable system; so stabilization has to be forced on it by close-loop control.
State feedback control with Zg,ˆ˙Zg,¨Zm
Zg,Z˙ˆg,Z¨m (absolute acceleration) as the state vector and Zg,¨ZmZg,Z¨m as output vector has been proven, after the linearization, to allow for smaller coefficients variation with linearization point conditions. So an airgap sensor and an absolute acceleration sensor are needed. The track irregularities are represented by Żs(t),State feedback control may be designed using an optimization criterion that secures electromagnet-guideway collision avoidance, ride comfort, and limited control power.
As Żg cannot be measured, an observer is needed; particular observer properties are necessary to handle track irregularity perturbations.
Dedicated transfer functions (19.45 through 19.48) are used to calculate performance indices:
rms airgap deviation error: ˉZg
Z¯¯¯g Voltage and current rms deviations: ¯□V,¯□i
□V¯¯¯¯¯,□i¯¯¯¯
Ride comfort: ϕ¨Zm
By a numerical example it is proven that even without a mechanical suspension system ALS may provide ˉZg/Zg0
Z¯¯¯g/Zg0 < 0.33 (to avoid collisions with the track) but at huge voltage ¯ΔV/V0ΔV¯¯¯¯¯/V0 = 20 and large current rations ¯Δi/i0Δi¯¯¯¯/i0 > 3 at 100 m/s. Consequently, secondary and tertiary mechanical suspension systems are needed to handle the control at reasonable control power and good ride comfort above 5 Hz, in 100 m/s (or so) MAGLEVs.The vehicle lifting (take off) and landing requires special control as state feedback control cannot handle such large variations of airgap. More robust control to handle both running and lifting and landing of the vehicle is needed.
Sliding mode control, plus a PI control close to the target and an interior fast (bi-positional) current loop, has been proven capable of handling most operation modes of a mediumspeed (15–20 m/s) MAGLEV at less than 2.5 kW/ton control power and airgap variation from 20 mm (idle position) to the rated 10 mm.
Also state feedback control plus a flux feedback was shown to be proper for robust control of ALS.
Finally, sliding mode zero power (current) control for running and SM nonzero current control for takeoff and landing with airgap planned trajectory tracking have been proven to be adequate for PM-assisted ALSs. A calculated spectacular 0.36 kW/ton control power at 100 km/h suggests that PM-assisted ALSs should be given more consideration in the future, especially for an industrial platform.
At the other end of the scale, for axial/magnetic bearings, a PM-assisted ALS has been proven, even by PID + SM + current control, capable for large axial force perturbation rejection for speed transients of ±18 krpm [19].
Even the placement of a high-temperature superconductor to produce constant-width-airgap attraction force has been proven to be adequate for simplified control ALSs.
It is estimated that ALS will spread more in the future due to low energy consumption, low noise and vibration in transportation of people or in industry, and for industrial MAGLEV platforms [20].
References
1. H. Kemper, Suspension systems through electromagnetic forces, a possible approach to basically new transportation technologies, ETZ, 4, 1933, 391–395 (in German).
2. H. Kemper, Electrical railroad vehicles magnetically guided, ETZ-A, 1, 1953, 11–14 (in German).
3. G. Bohn, P. Romstedt, W. Rothmayer, and P. Schwarzler, A contribution to magnetic levitation technology, Proceedings of the Fourth ICEC, Eindhoven, the Netherlands, 1972, pp. 202–208.
4. R.M. Borcherts and L.C. Davis, Lift and drag forces for the attraction electromagnetic systems, Ford Motor Company Scientific Research Staff Report, 1976.
5. S. Yamamura and T. Ito, Analysis of speed characteristics of the attractive electromagnetic levitation vehicles, Elec. Eng. Jap., 95(162), 1975, 84–89.
6. I. Boldea and S.A. Nasar, Linear Motion Electromagnetic Systems, Chapter 10, John Wiley & Sons, New York, 1985.
7. I. Boldea, Optimal design of attraction levitation magnets including the end effect, EME (now EPCS) J., 6, 1981, 57–66.
8. F. Matsumura and S. Yamada, A method to control the suspension system utilizing magnetic attraction force, Elec. Eng. Jpn., 94(6), 1974, 50–57.
9. I. Boldea, A. Trica, G. Papusoiu, and S.A. Nasar, Field tests on MAGLEV with passive guideway linear inductor motor transportation system, IEEE Trans., VT-37(4), 1988, 213–219.
10. A. Forrai, T. Ueda, and T. Yumura, Electromagnetic actuator control: A linear parameter—Varying (LPV) approach, IEEE Trans., 1E-54(3), 2007, 1440–1441.
11. Al. Trica, Electromagnetic Suspension Systems, University Politehnica Timisoara Publishers, 2009 (in Romanian).
12. V. Utkin, J. Guldner, and J. Shi, Sliding Mode Control in Electromechanical Systems, 2nd edn., CRC Press, Taylor & Francis Group, New York, 2009.
13. L. Li, T. Shinshi, and A. Shimokohbe, State feedback control of active magnetic bearing based on current change rate alone, IEEE Trans., MAG-40, 2004, 3512–3517.
14. J.A. Duan, H.B. Zhou, and N.P. Guo, Electromagnetic design of a novel linear MAGLEV transportation platform with finite element analysis, IEEE Trans., MAG-47(1), 2011, 260–263.
15. D. Wu, X. Xie, and S. Zhou, Design of a normal stress electromagnetic fast linear actuator, IEEE Trans., MAG-46(4), 2010, 1007–1014.
16. Y.K. Tzeng and T.C. Wang, Analysis and experimental results of a MAGLEV transportation system using controlled—PM electromagnets with decentralized robust control strategy, Record of LDIA-1995, Nagasaki, Japan, 1995, pp. 109–113.
17. W. Gao and J.C. Hung, Variable structure control of linear system: A new approach, IEEE Trans., 1E-40(1), 1993, 45–55.
18. Y.K. Tzeng and T.C. Wang, Dynamic analysis of the MAGLEV system using controlled—PM electromagnets with robust zero power control strategy, Record of IEEE Intermag 1995, San Antonio, TX, 1995.
19. K. Hijikata, M. Takemoto, S. Ogasawara, A. Chiba, and T. Fukao, Behavior of a novel thrust magnetic bearing with a cylindrical rotor on high speed rotation, IEEE Trans., MAG-45(10), 2009, 4617–4620.
20. M. Ghodsi, T. Ueno, and T. Higuchi, Improvement of magnetic circuit in levitation system using HTS and soft magnetic material, IEEE Trans., MAG-41(10), 2005, 4003–4005.