
3 Linear Induction Motors
Topologies, Fields, Forces, and Powers Including Edge, End, and Skin Effects
This chapter deals with flat linear induction motor (LIM) topologies, double sided and single sided, with their windings and field technical theories accounting for edge, longitudinal end, and skin effects, with the scope of providing a deep understanding of flat LIMs performance and limitations and, also, preparing analytical expressions for equivalent circuit models of LIMs to be developed and then used to investigate the dynamics and control of LIMs (Chapter 4).
3.1 Topologies of Practical Interest
As seen in Chapter 2, LIMs are counterparts of rotary induction motors. They may be obtained by “cutting” and unrolling the rotary induction machines to yield flat, single-sided topologies (Figure 3.1a), where the cage secondary may be used as such or replaced by an aluminum sheet placed between two primaries to make the double-sided LIM (Figure 3.1b).
The passive long secondary (track) is fixed for short-primary-mover configurations (Figure 3.1) and secures a reasonable low cost track/km, while it imposes transfer of full propulsion electric power on board of vehicle, together with the static power converters and their control. However, the vehicle becomes independent, and a faulty vehicle may be put away to let the track available for the healthy vehicles.
Though the research on LIMs has started with double-sided configurations, it ended up so far in using single-sided moving primary topologies for transportation (on wheels or on magnetic suspension) in commercial applications. For long tracks, an aluminum sheet on solid mild iron (made of 3–4 “thick” laminations) secondary (Figure 3.1c) may be preferable on account of lower cost, at the price of lower LIM efficiency and power factor, with corresponding consequences in increased inverter kVA ratings and costs.
The ladder secondary allows for a lower (up to 10–12 mm) magnetic airgap (in transportation) than the aluminum sheet on iron secondary (16–18 mm). The double-sided LIM implies for transportation applications a total magnetic airgap of 26–40 mm, which, unless the pole pitch is high, leads to small power factors (less than 0.4).
Besides propulsion force (thrust) Fx, normal force Fn is exerted on the LIM primary. But for double-sided LIM (Figure 3.1b), the net normal force on secondary is zero for symmetrical position of the latter in the airgap. On the contrary, the single-sided LIM is characterized by a net nonzero normal force (on secondary and primary)—Fn/Fx ≈ 3–4—which may be used for active magnetic suspension by adequate control in MAGLEVs. The normal force is notably higher for ladder secondary single-sided LIMs (Fn/Fx ≈ 8–10), providing perhaps all necessary magnetic suspension for an acceleration of 1 m/s in vehicles where the LIMs represent 10% of loaded vehicle weight.

FIGURE 3.1 LIM flat topologies with short-primary mover: (a) single-sided with cage-core secondary (track), (b) double-sided with aluminum-strip secondary (track), and (c) single-sided with aluminum sheet on iron secondary.
For the double-sided LIM (DLIM), with close to zero normal force, separate dc-fed controlled electromagnets acting on a separate solid iron track are required for active magnetic suspension in LIM-MAGLEVs.
There are also tubular LIMs—as introduced in Chapter 2—but they are destined to low excursion (lower than 1.5–2 m) and will be treated separately in Chapters 4 and 5 as low-speed LIMs.
Long-primary active track with wound-secondary short movers have also been proposed [1], but the development of synchronous long-primary (active guideway) linear motors with superior performance (due to dc mover magnetization) has rendered them less practical.
Considering flat, double-sided, and single-sided short-primary LIMs, we should notice that their cores are to be laminated (even coarsely) as in rotary IMs. The LIM short-primary cores are open magnetic circuits along the direction of motion, and thus the three-phase ac windings located in their uniform slots have special peculiarities, though their purpose is the same as in rotary IMs: to produce traveling magnetomotive forces (mmfs) and thus close to traveling airgap magnetic flux density. Basically, there are two main types of LIM practical windings:
Single-layer 2p (even) pole windings (Figure 3.2a)
Double-layer 2p + 1 (odd) pole windings with half-filled end slots (Figure 3.2b)
While Figure 3.2 illustrates q1 = 1 slot/pole/phase, full-pitch-coil three-phase LIM windings, for large (transportation) LIMs, q1 = 2,3 and short span coils (for two-layer windings) may be used to produce closer to traveling mmf, as in rotary IMs (with lower space harmonics).
As the power factor of LIMs, due to larger airgap/pole pitch ratios than in rotary IMs, tends to be lower, the magnetization current in p.u. tends to be larger—around or even higher than Irated/√2
To further shorten the end-turns length, some peculiar windings such as those in Figure 3.3 may be adopted.
The three-layer winding with chorded coils (Figure 3.3a) provides a 0.867 fundamental winding factor and uses the primary slots less efficiently but shows notable shorter end coils while, however, the phase resistance and self and mutual inductances are slightly nonsymmetric. The tooth-coil winding in Figure 3.3b has q = 1/2 slots/pole and phase and poor fundamental winding factor, but it shows very short end connections.
Finally, the tooth-coil winding in Figure 3.3c, with 12 coils, in a different connection can produce a 10-pole mmf, with a good fundamental winding factor (around 0.933), but not all 10 poles are symmetric. Two such primaries, phase shifted properly, could improve the 10-pole mmf symmetry and be satisfactory for some applications, though higher order space harmonics still show up in the mmf, in a double-sided primary LIM configuration.
The winding in Figure 3.3c is typical for linear PM synchronous motors, as it is easy to manufacture and the end coil length is low; they have a high fundamental winding factor. The fundamental winding factor is the ratio between real emf and its ideal value when the emf in all coils in series per phase would add arithmetically. Reducing the subharmonics in tooth-coil (fractionary) windings with Ns1 and 2p slightly different from each other may be tried by dividing some of the slot volume into 2, 3 coils of different phases. The ac windings so far are three phase, but split-phase (or two-phase) windings may also be envisaged for small thrust (power) applications as for rotary IMs. Two-phase symmetric windings may be preferable when 2p = 2, 4 in low-speed applications to avoid phase current asymmetry.
The topologies of practical interest so far warrant remarks as follows:
The magnetic airgap (gm) is larger than the mechanical airgap (g) in DLIMs and in single-sided LIMs with conductive sheet on iron secondary thickness:
gm=K×g+hAL(3.1)
gm=K×g+hAL(3.1) 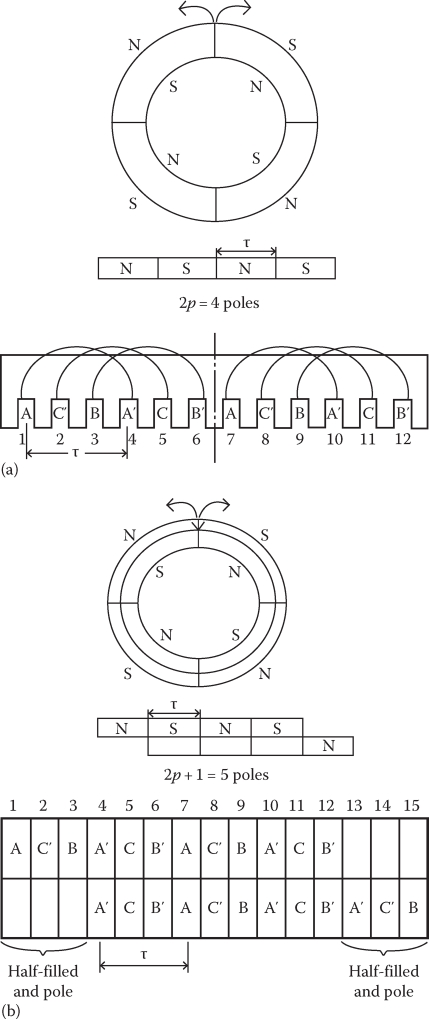
FIGURE 3.2 Single- and two-layer three-phase LIM windings: (a) 2p = 4, q1 = 1 slot/pole/phase, single layer; (b) 2p + 1 = 5, q1 = 1, double layer.
K = 1 for single-sided LIM (SLIM) and K = 2 for DLIM.
The magnetic circuit of LIMs is open along the direction of motion (it has limited length); however, the Gauss flux law applies, so there may be a redistribution of airgap in the back-iron (yoke) flux densities, in contrast to rotary IMs where circumferentially the magnetic circuit is closed.

FIGURE 3.3 Short end-coil LIM windings: (a) NC = 12, 2p = 4, q1 = 1, y/τ = 2/3, 3 layers and (b) NC = 12, 2p = 4, q1 = 1/2, y/τ = 1/3—tooth coils; (c) Ns1 = 12, 2p = 10, q = 2/5.
The primary mmf fundamental may be described by a traveling wave, along the primary length, as in rotary IMs [2]:
θ(x,t)=θm1⋅cos(ω1⋅t−πτx), for 0<x<2pτ(3.2)
θ(x,t)=θm1⋅cos(ω1⋅t−πτx), for 0<x<2pτ(3.2) θ(x,t)=0 for x<0 and x>2pτ
θ(x,t)=0 for x<0 and x>2pτ Fm1=3√2⋅W1⋅I1⋅kω1πp(3.3)
Fm1=32–√⋅W1⋅I1⋅kω1πp(3.3)
where
p is pole pairs
W1 is turns per phase in series (for one current path only)
ω1 = 2 • π • f1, f1 is the primary frequency, τ is the pole pitch or half the period of primary mmf wave, I1 is the rms value of primary phase current
Formulae (3.2) through (3.3) are valid strictly for a 2p (even) pole-count windings (Figure 3.2a).
For the 2p + 1 (odd) pole winding, we may consider two such waves, halved in amplitude and phased shifted by τ in space and by 180° in time (Figure 3.2b) for full pitch coils; for chorded coils, the space shift is less than τ
θ(x,t)=θxu(x,t)+θxl(x,t)(3.4)
θ(x,t)=θxu(x,t)+θxl(x,t)(3.4) θxu(x,t)=Fm12⋅cos(ω1⋅t−πτ⋅x) for 0<x≤2pτ(3.5)
θxu(x,t)=Fm12⋅cos(ω1⋅t−πτ⋅x) for 0<x≤2pτ(3.5) θxu(x,t)=0 for 0>x and x>2pτ(3.6)
θxu(x,t)=0 for 0>x and x>2pτ(3.6) θxl(x,t)=−θm12⋅cos(ω1⋅t−πτ⋅x) for τ≤x≤(2p+1)⋅τ(3.7)
θxl(x,t)=−θm12⋅cos(ω1⋅t−πτ⋅x) for τ≤x≤(2p+1)⋅τ(3.7) θxu(x,t)=0 for τ>x and x>(2p+1)⋅τ(3.8)
θxu(x,t)=0 for τ>x and x>(2p+1)⋅τ(3.8) One of the three windings is placed in a different position with respect to the open core end (phase c) and thus, at least for low number of poles 2p = 2, 4, 6 or 5, 7, we expect slightly different self and mutual inductances of the phases, which translates into asymmetric phase currents for symmetric supply voltages. Even if symmetric current control is performed through a PWM inverter, the different self and mutual inductances will trigger slight thrust pulsations. This effect, present from zero speed, may be called static end effect. In a multiple unit, we may envisage three primary modules where the order of phases in slots is “rotated” and thus, for their series connection phase by phase, the phase currents will become symmetric; also, the total thrust pulsations are reduced.
It may be argued that by adopting a symmetric two-phase winding with 2p = 2, 4, the phase currents will be symmetric and thus the static end effect is zero; true, but we need a two-phase dedicated inverter, which shows a smaller number of nonzero voltage vectors and thus higher current ripple is expected. Even so, for 2p = 2, 4 poles in small thrust applications, the two-phase winding seems the first option, which justifies building a dedicated two-phase inverter and control system.
As is well known, the back-iron flux, in the primary and secondary of rotary IMs, is half the airgap pole flux Φ1p:
Φys=Φ1p2(3.9)
Φys=Φ1p2(3.9) For LIMs, the maximum back-iron flux becomes larger, up to almost equal to the pole flux (airgap flux per pole) due to airgap flux redistribution to suit Gauss flux law over the limited core longitudinal extension of primary:
Bg1(x,t)=μ0⋅Fm1⋅cos(ω1⋅t−πτ⋅x)KC⋅gm⋅(1+ks)(3.10)
Bg1(x,t)=μ0⋅Fm1⋅cos(ω1⋅t−πτ⋅x)KC⋅gm⋅(1+ks)(3.10) Bys(x,t)=1hys⋅x∫0Bg1(x,t)=Bg1⋅τπ⋅hys⋅(sin(ω1⋅t)−sin(ω1⋅t−πτ⋅c))(3.11)
Bys(x,t)=1hys⋅∫0xBg1(x,t)=Bg1⋅τπ⋅hys⋅(sin(ω1⋅t)−sin(ω1⋅t−πτ⋅c))(3.11) 
FIGURE 3.4 DLIM, zero secondary conductivity (ideal no load) flux lines produced by primary traveling mmf (2p = 4 poles).
Even for a pure traveling airgap flux density, which, for zero secondary conductivity, fulfills Gauss flux law, the back-iron flux density Bys has an additional component, and thus for x = τ, 3τ, 5τ, Bys is Bysmax = (2 • Bg1 • τ)/(π • hys) instead of (Bg1 • τ)/(π • hys) as in rotary LMs.
Figure 3.4 illustrates the fact that the total flux per end pole is forced to flow through the back iron as its flux lines do not close through the air zones outside the primary (longitudinal core ends). A similar assertion is valid for the central poles of the 2p + 1 pole primaries.
The almost doubling of back-iron flux density in some points in comparison with rotary LIM has notable design consequences in low-pole-count LIMs (2p = 2, 4 or 2p + 1 = 5) in the sense of doubling the back-iron depth for given flux density in the primary; for the single-sided LIM, the solid back iron of the secondary has to handle also almost all pole flux, which means a much higher degree of magnetic saturation and skin effects, to be considered in any realistic design.
As the maximum yoke flux density appears at x = 3τ, 5τ, it suggests avoiding drawing holes in those regions for stacking the laminations or cooling, etc.
3.2 Specific LIM Phenomena
3.2.1 Skin Effect
The secondary frequency f2 of the secondary emfs and their currents may be calculated as a function of slip S, as for the rotary IMs:
f2=S⋅f1(3.12)
with
S=(Us−U)Us; Us=2τf1(3.13)
The ideal synchronous speed Us (or the mmf wave speed) is, as for rotary IMs, Us = 2 • τ • f1, where U is the linear speed opposite to Us, in short (moving) primary LIMs.
As, in general, the thickness of the secondary conductive sheet is rather small, to reduce long secondary (track) costs, with respect to primary slot depth, there is a need for a rather large slip, 5%–10%, to produce notable thrust density (1–2 N/cm2 of primary area). In a DLIM, the aluminum secondary thickness (per primary side) hAL/2 is up to about 6–8 mm for large high-speed LIMs and so is hAL for SLIM with aluminum sheet on iron secondary.
The depth of ac field penetration in a conductor δAL is [2]
δAL=√2S⋅2π⋅f1⋅μ0⋅σAL(3.14)
where σAL is the aluminum conductivity.
For S • f1 = 10 Hz, σAL = 3.33 × 107 Ω−1 m−1, δAL = 0.0276 m.
As δAL at 10 Hz is notably larger than the thickness of aluminum plate (sheet), the skin effect is not very important (as known from rotary IMs; KR ≈ 1 + ξ= 1 + hAL/δAL, because hAL/δAL ≪ 1).
The depth of field penetration may be corrected by considering the traveling field (and not the ac field characteristic to rotary IM slots) variation with x in a simplified bidimensional airgap field model where δAL would be replaced by δ′AL:
δ′AL=Re(1√(π/τ)2+j⋅S⋅f1⋅2π⋅μ0⋅σAL)(3.15)
For high pole pitches (τ > 0.1 m) the first term under the square root in (3.15) is rather small but it may still be considered, for a few percent better precision. Now the aluminum skin effect coefficient KR skin of rotary IMs may be applied [2]:
KR skin=ξsinh(2ξ)+sin(2ξ)cosh(2ξ)−cos(2ξ)(3.16)
ξ=hALδ′AL(3.17)
In essence, the current density crowds closer to the aluminum sheet surface, perpendicular to the airgap normal flux density: its phase is also shifted along the aluminum sheet depth. The hAL is replaced by hAL/2 for the DLIM in (3.16) because the magnetic field penetrates the aluminum sheet from both sides (Figure 3.5).
If the SLIM secondary back iron is solid, its field depth of penetration at f2=S • f1 is notably smaller unless the latter gets heavily saturated:
δ′iron=Re(1√(π/τ)2+j⋅S⋅f1⋅2π⋅μ(Bt iron)⋅σiron)(3.18)
For same S • f1 = 10 Hz, τ = 0.15 m, and σiron=3.5 × 106 (Ω m)−1, even with μiron = 60 • μ0 (at Bt iron ≈ 2 T, Hiron = 26,540 A/m), δ′iron = 11 mm.
Bt is the tangential flux density on the back-iron upper surface.
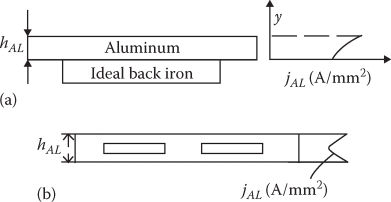
FIGURE 3.5 Current density amplitude variation in aluminum versus aluminum sheet thickness: (a) SLIM and (b) DLIM.
As the approximate back-iron flux is about the flux per pole, we have
Bt max⋅δ′iron(1−e−1)≈Bg1⋅2π⋅τ(3.19)
Consequently, Bg1, Bt max • δ′iron (1 − e−1), the peak airgap flux density is Bg1 = 0.209 T. This is a rather small value. Consequently, the back iron should be divided into a few (3–4) sections or “laminations” (Figure 3.6) so as to reduce the effective electric conductivity of iron and thus increase the field penetration depth to 20 mm or more and to provide for a load airgap flux density of at least 0.4 T.
Note: For ladder secondary, if the secondary iron core is laminated, the skin effect has to be treated as in rotary IMs [2]. This rationale leads to the conclusion that the skin effect produces a decrease in the equivalent conductivity σe = σ/KR skin. The secondary leakage inductance as a consequence of skin effect (due to secondary iron eddy current density phase shifting, along iron depth) may be neglected for DLIMs but not for SLIMs.
3.2.2 Large Airgap Fringing
At least in transportation applications, the magnetic airgap gm per pole pitch τ ratio is rather large in comparison with rotary IMs. In a simplified 2 • D(x, y) field theory, the traveling mmf varying with ej·πτ·x
KFg≈sinh(π/τ)⋅gm(π/τ)⋅gm≥1(3.20)
A typical 2D field distribution of airgap flux lines for a DLIM is shown in Figure 3.6, where both skin effect and large airgap fringing are visible.

FIGURE 3.6 2D airgap field in DLIM under load (with aluminum sheet currents). (After Nasar, S.A. and Boldea, I., Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001.)
3.2.3 Primary Slot Opening Influence on Equivalent Magnetic Airgap
The airgap flux density is modulated by the primary slot openings (Figure 3.7a); an equivalent effect consists of a larger constant airgap ge.
The ratio gmec/gm = KC (KC = 1.1–1.7 in general), Carter coefficient, a one-century-old concept, revised recently for large magnetic airgap (PM) machines, puts face to face the old and a newly derived formula [5]—both obtained by conformal mapping:
Kc=gmecgm=11−σc⋅bsτs; τs; slot pitch(3.21)
σc=2π⋅tan−1(bs2⋅gm)−1π⋅2⋅gmbs⋅ln((1+bs2⋅gm)2)(3.22)
and
Kc new=1+τs2πgm[(1+α)⋅log(1+α)+(1−α)⋅log(1−α)](3.23)
α=bsτs; bs, slot opening
Reference [5] establishes regions where one or the other formula is preferable (Figure 3.7) but, in general, for large gm/τs and bs/τs values, the new formula (3.23) is more precise.
If the magnetic airgap gm= g + hAL is large (14–30 mm), then the slots may be open, as long as bs < 2 • gm, which leads to easy insertion of coils in slots, while Kc is, in general, less than 1.15. For low (0.7–1.2 mm) mechanical airgap (industrial, short-travel machine tool table applications), the ladder secondary is preferable, as it leads to satisfactory efficiency and power factor (both above 0.7) even at speeds below 3 m/s. In such cases, semiclosed slots, at least in the primary, are to be used.
3.2.4 Edge Effects
For the aluminum sheet or aluminum sheet on iron secondaries of LIM, the trajectory of induced secondary currents (by the traveling stator mmf) is closed (div ˉJ=0
The effect of the presence of Jx in the active zone is called edge effect. It boils down to a decrease in conductive sheet equivalent electrical conductivity KtR, which is dependent on machine geometry and secondary (slip) frequency f2 = S • f1 in DLIM and, in addition, on magnetic saturation in SLIM. There is also a very small decrease in the magnetization inductance due to edge effect, but this may be neglected in most practical cases. (This phenomenon is absent in ladder secondary SLIMs.) We will rederive here in short the 2D field analysis of edge effects for DLIMs and then generalize it to SLIMs.

FIGURE 3.7 Slot opening influence on airgap flux density (Carter coefficient): (a) airgap flux density waveform; (b) Carter coefficient formulae: dividing regions. (After Matagne, E., Electromotion, 15(4), 171, 2008.)
To separate the edge effect in a 2D field analysis, let us assume that
The two primaries slotting is replaced by an increased airgap via KC > 1
The airgap fringing is accounted for by KFg > 1
So the total equivalent airgap get = gm • KC • KFg
The stator mmf is represented by its fundamental traveling wave in secondary coordinates
θ1(x,t)=F1m⋅e−j⋅(S⋅ω1⋅t−πτ⋅x)(3.24)
θ1(x,t)=F1m⋅e−j⋅(S⋅ω1⋅t−πτ⋅x)(3.24) S • ω1 is the secondary angular frequency of induced currents
We may separate the time dependence as the secondary current density varies sinusoidally in time with secondary (slip) frequency S • ω1
The LIM length is so large along motion direction that there is no end effect (to be treated later in this chapter)
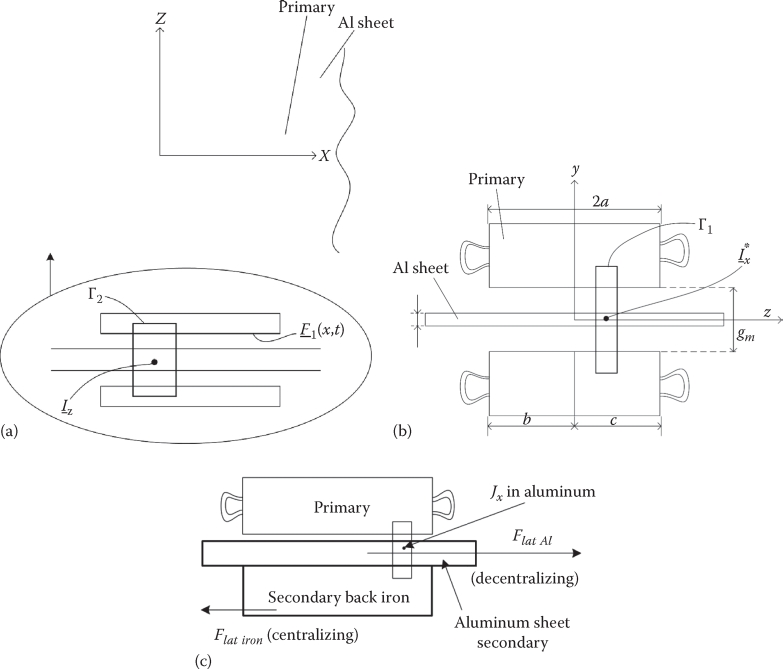
FIGURE 3.8 (a) Secondary current density components, (b) DLIM cross-section, and (c) decentralized SLIM secondary.
Outside the active zone (lyl > ae, ae ≈ a + get), get is introduced to account for transversal flux fringing), as div ˉJ2=0
J¯¯2=0 :∂J2x∂x+∂Jz∂z=0(3.25)
∂J2x∂x+∂Jz∂z=0(3.25) At y = −b, c, as expected, and Jz = 0
Inside the active zone, we apply Ampere’s law along contours Γ1 and Γ2 in Figure 3.8:
get⋅∂Hy∂z=J2x⋅dAL(3.26)
get⋅∂Hy∂z=J2x⋅dAL(3.26) −get⋅∂(Hy+H0)∂x=Jm+J2z⋅dAL(3.27)
−get⋅∂(Hy+H0)∂x=Jm+J2z⋅dAL(3.27)
where Hy is the only magnetic field component, produced by the secondary currents, while H0 is the initial airgap field in the absence of secondary currents; Jm is the primary current sheet (in A turns/m):
J¯m=∂θ¯1(x,t)∂x(3.28)
Adding Faraday’s law,
∂J2z∂z−∂J2x∂z=−j⋅S⋅ω1⋅μ0⋅σet⋅(Hy+H0)(3.29)
σet= σ/KR skin, accounts for the skin effect in the secondary ((3.16), with dAL/2 instead of dAL for DLIM).
H0 is obtained from (3.27) with J2z = 0:
H0=j⋅Jm⋅e−j⋅πτ⋅x(π/τ)⋅get(3.30)
Equations 3.26 through 3.29 lead to the equation of magnetic field of secondary currents (Hy):
∂2Hy∂x2+∂2Hy∂x2−j⋅S⋅ω1⋅σet⋅μ0dALget⋅Hy=j⋅S⋅ω1⋅σet⋅μ0dALget⋅H0(3.31)
Equation 3.31 is valid for |z| < ae, that is, in the active zone.
The solution of (3.31) is straightforward:
Hy=−H0⋅(j⋅S⋅ω1⋅μ0⋅σet⋅dAL/get)((π2/τ2)+j⋅S⋅ω1⋅σet⋅μ0(dAL/get))+A⋅cosh(α⋅z)+B⋅sinh(α⋅z)(3.32)
with
α2=π2τ2+j⋅ω1⋅S⋅μ0⋅σetdALget=(πτ)2⋅(1+j⋅S⋅Get)(3.33)
If we define by Get,
Get=μ0⋅τ2⋅ω1π2⋅σet⋅dALget(3.34)
Then,
Hy=−H0⋅(j⋅S⋅Get)(1+j⋅S⋅Get)⋅(A⋅cosh(α⋅z)+B⋅sinh(α⋅z))(3.35)
Get is the so-called goodness factor [3, 7] or the equivalent of Reynold’s number in electrical terms [1, 8].
The goodness factor Get lumps up quite a few geometrical variables, by considering the slot opening, airgap fringing, and secondary skin effects. Thus, Get is a very powerful variable to be used for design.
To continue with the edge effect analysis, let us notice that, for the overhang areas of secondary (|z| < ae), the current densities retain from (3.35) one of the two last terms:
Jzr=−C⋅sinhπτ⋅(c−z), for ae<z<cJxr=+jC⋅coshπτ⋅(c−z), for ae<z<cJxl=jD⋅coshπτ⋅(b+z), for −ae>z>−bJxl=jD⋅coshπτ⋅(b+z), for −ae>z>−b(3.36)
The r and l correspond to left and right. From the current density continuity conditions at z = ±ae, we get the constants A, B. C, D.
Also from (3.27),
J2z=−Jm⋅j⋅S⋅GetdAL⋅(1+j⋅S⋅Get)⋅ej⋅(S⋅ω1⋅t−πτ⋅x)⋅(A⋅cosh(α⋅z)+B⋅sinh(α⋅z)), for |z|≤ae(3.37)
J2z=−getdAL⋅α⋅(B⋅cosh(α⋅z)−A⋅sinh(α⋅z))⋅Jm⋅j⋅S⋅GetdAL⋅(1+j⋅S⋅Get)⋅ej⋅(S⋅ω1⋅t−πτ⋅x)(3.38)
As expected J2x = 0 for z = 0 (in the center) if b = c (symmetrical placement of secondary inside the primary). For a numerical example characterized by the data, τ = 0.35 m, f1 = 173.3 Hz, S = 0.08, dAL = 6.25 mm, gmt = 37.5 mm, Jm = 2.25 • 105 A turns/m, the results in Figure 3.9 were obtained [3].
A few remarks are in order:
The edge effect produces a nonuniform total airgap flux density along “z” direction, which may lead to a larger magnetic saturation in the primary core left and right edge sides. However, the average airgap flux density is not modified notably.
Both current density components vary with “z” due to edge effects.
The global consequences of edge effects can be calculated by comparing the active and reactive powers (by Poynting vector) with and without edge effect (Jx = 0 or the overhangs are made of a fictitious superconductor, and the secondary is made of aluminum bars).
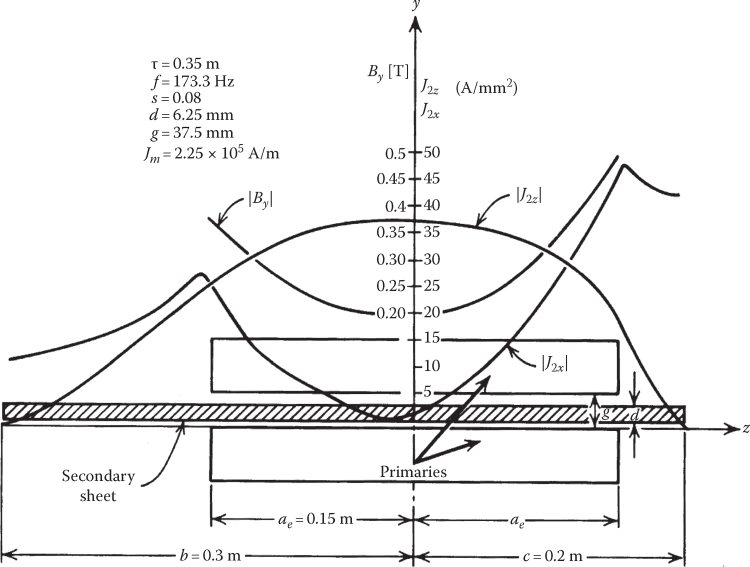
FIGURE 3.9 Airgap flux density and secondary current density components in the presence of edge effect (b ≠ c). (After Nasar, S.A. and Boldea, I., Linear Motion Electric Machines, John Wiley & Sons, New York, 1976.)
Doing this, Ref. [6] has found for b = c (symmetrically placed secondary), for the active power ratio, a reduction coefficient ktr of equivalent conductivity σe of aluminum sheet:
σe=σ(kskin×ktr)(3.39)
ktr=k2xkR⋅[1+S⋅G2et⋅k2R/k2x1+S2⋅G2et]≥1(3.40)
ktr=k2Rkx≈1; kR=1−Re[(1−S⋅Get)⋅λα⋅ae⋅tanh(α⋅ae)](3.41)
kx=1+Re[(S⋅Get+j)⋅S⋅Get⋅λα⋅ae⋅tanh(α⋅ae)](3.42)
λ=11+√1+j⋅S⋅Get⋅tan(α⋅ae)⋅tanhπτ⋅(c−ae)(3.43)
For low values of S • Get(S • Get < < 1) and (or) narrow primaries 2 • ae/τ < 0.3, ktr yields the expression
ktr=11−tanh(πτ⋅ae)πτ⋅ae/[1+tanh(πτ⋅ae)tanhπτ(c−ae)]≥1(3.44)
The edge effect may be considered by simply reducing the equivalent electric conductivity of the secondary by ktr; in general, ktr is to be reduced to decrease the secondary Joule losses and increase the goodness factor, which now yields the formula
Ge=Getktr=μ0⋅τ2⋅ω1⋅σAL⋅dALπ⋅ktr⋅kskin⋅(g⋅kc⋅kFr)(3.45)
Values of ktr ≈ 1.3–1.5 lead to reasonable overhangs (c − a = τ/π) and thus limit secondary costs. As Ge lumps influences of skin effect, airgap fringing, stator slotting, and edge effect, it becomes the key variable in characterizing LIM performance, besides the number of poles 2p and slip S, frequency ω1, and stator mmf (or J1m).
But before switching to the study of dynamic end effect, let us generalize these results on edge effects to SLIMs as they are more practical, due to secondary ruggedness and reasonable track costs.
3.2.5 Edge Effects for SLIMs
A SLIM for short excursion (a few meters) may use a ladder-laminated core secondary to obtain high efficiency (above 0.8) and good power factor (above 0.7) for mechanical gaps of less than 1.5 mm. SLIMs do not experience edge effects and should be treated as rotary IMs unless the number of poles 2p = 2, 4, when the static end effect occurs, as already mentioned in this chapter. For excursions longer than a few meters, the cost of secondary becomes important and thus an aluminum sheet on secondary becomes important and, consequently, an aluminum sheet on iron secondary (Figure 3.10a) is the only economical solution. To increase the contribution of solid back iron of secondary to the thrust, the depth of penetration of the magnetic field in it should be increased, and making it of 3–4 pieces (“laminations”) seems the way to do it (Figure 3.10b).
To account for the edge effect in SLIMs with aluminum sheet on iron, we should first notice that
The secondary back-iron width is about equal to the “stack width” of primary, 2a, while the aluminum sheet (flat or bent toward back-iron sides for larger ruggedness) is wider, to produce enough thrust. Also, to counteract the lateral expulsion force on the aluminum sheet by a self-centering force due to the primary and secondary iron cores, in case of off-center (laterally) placement of the secondary with respect to primary, the secondary back-iron width equals the primary stack length.
The airgap flux per pole has to close through the back iron along (basically) the field penetration depth δiron (3.15); fortunately, the division of secondary back iron into 3–4 “laminations”—Figure 3.10b leads to a pronounced edge effect in iron, which reduces the iron equivalent electrical conductivity:
σie=(σironktri)(3.46)
σie=(σironktri)(3.46)
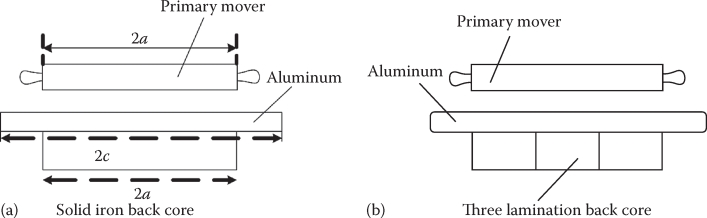
FIGURE 3.10 SLIM secondaries: (a) with solid back iron and (b) made of three “laminations.”
The ktri coefficient for edge effect for i back-iron laminations may be considered based on Equation 3.40 with c = ae and ae/i instead of ae:
ktri≈11−tanh(πτ⋅aei)πτ⋅aei(3.47)
Now, the skin effect (3.15) in iron may be calculated with σie and not with σiron.
Also, the back iron adds a “virtual length” to the airgap because it is very heavily saturated; the increased airgap ge is
gse≈(1+ksat)⋅(g+hAL)⋅kc⋅kFr(3.48)
The saturation coefficient ksat in (3.43) stems from the reluctance ratio (of back iron and of airgap pole flux paths):
kss≈2τ2π2⋅μ02⋅(g+hAL)⋅kc⋅δi⋅μiron(3.49)
Let us note that δi (3.15) is dependent on μiron, which in turn depends on flux density Bti tangential on the iron upper surface:
Bti⋅δi≈Bg⋅τπ(3.50)
This is an alternative calculation of Bti for given Bg1 (airgap flux density at rated (or peak) thrust) or Bti ≈ 2 T (or in general, as required).
Now, again, we may lump up the iron contribution to thrust by an increase in the equivalent conductivity of secondary σse:
αse=σALktr AL⋅kskin⋅(1+σiσAL⋅δi⋅ktr AL⋅kskinkti⋅dAL)=σALktr AL⋅kskin(1+kis)(3.51)
In (3.51) the equivalent (active) thickness of back iron is δi and has to be calculated iteratively. The secondary back-iron contribution to thrust is lumped up in the aluminum sheet equivalent conductivity σse. An equivalent goodness factor Gse may be defined again with gse and σse:
Gse=μ0⋅τ2⋅ω1π2⋅dALgse⋅σse(3.52)
Note: It may be argued that the skin effect in the iron also shifts the phase of the current density along the iron depth and thus an additional leakage inductance (or “reactive” conductivity) is added.
3.3 Dynamic End-Effect Quasi-One-Dimensional Field Theory
Let us consider a 2p pole single-layer winding short-primary long-secondary DLIM whose primary is moving at speed U < Us; Us—the traveling primary mmf. Speed (Us = 2+τ.f1) (Figure 3.11). The phase shifting of eddy current in secondary iron may be considered through a leakage reactance equal to its resistance: S • ω1 • L2li = R′2i • R′2i is related to total secondary resistance as in (3.46) by the coefficient kiσ. Also notice that the lateral force (Figure 3.8c) jx × By by aluminum currents becomes decentralizing when the secondary is placed asymmetrically in the lateral direction (0y): For SLIM the solid back iron adds two lateral forces, one decentralizing (due to its eddy currents) and one centralizing (due to iron).
The contour c0(t0) of secondary is in time in positions c1(t1), c2(t2), c3(t3), c4(t4), with respect to the moving primary.
In position c0, there is no magnetic flux and so no induced voltage or current occurs.
When we consider contour c2, there is a strong variation of magnetic flux in it and thus additional currents occur along the contour (secondary). As the primary moves and contour c2 position is reached, the current induced in position c1 has already decreased by the secondary electrical time constant (calculated as for a rotary IM) Te2:
Te2≈Lm(gm)R′2=Geω1(3.53)
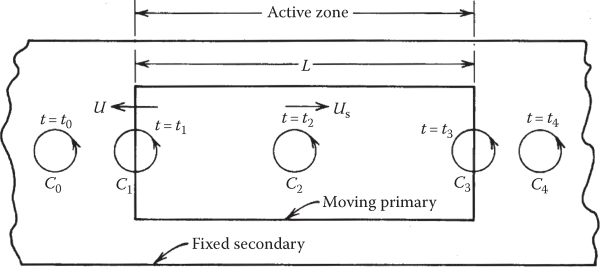
FIGURE 3.11 Dynamic end effect. (After Nasar, S.A. and Boldea, I., Linear Motion Electric Machines, John Wiley & Sons, New York, 1976.)
where
Lm is the magnetization inductance (the secondary leakage inductance is almost zero for aluminum sheet secondary once the airgap fringing effect has been considered).
R′2 is the secondary equivalent resistance reduced to the primary; the expressions of Lm and R′2 are calculated as if the machine were rotary with 2p poles but identical geometry of primary and secondary.
It is a known fact that if the speed is high, Urated > 20 m/s (100 m/s, for a 360 km/h in highspeed trains), the mechanical and the magnetic airgap gm is large, but still the conventional performance (without dynamic end effect) increases with higher goodness factor (Ge)—as in rotary IMs. A Ge ≥ 20 at f1 = 175 Hz (τ = 0.35 m, 2p = 10) should be typical for a high-speed application.
But in this case, 3Te2 = (3 × 20)/(2 •π•175) = 0.055 s. For a slip S = 0.08, the LIM speed would be
U=2τf1(1−S)=2⋅0.35⋅175⋅(1−0.08)=112.7m/s(3.54)
The length traveled during three time constants (3Te2) would be Llef = U × 3Te2 = 112.7 × 0.055 = 6. 198 m; the length of the primary L = 2pτ = 10 × 0.35 = 3.5 m. Consequently, the additional (dynamic end-effect-produced) entry secondary currents would not die out before, but rather after, the LIM primary exit end. It means a notable dynamic end effect or a high-speed LIM. But in the position of exit-end c3, new additional dynamic end-effect currents occur. However, these currents would die out with a different (much smaller) time constant introduced here as Texit:
Texit=Lm exit(τ/π)R′2=GexitR′2; gm exit=τ/π(3.55)
The equivalent airgap behind the primary (Figure 3.11) corresponds to an average flux line length in air, which is approximately τ/π, because the current periodicity is still τ at initiation (there are two primaries in DLIMs); for a SLIM gm exit= τ/π, still, as half the travel of flux lines is considered to take place in the back iron.
For the same example (with gm = 37.5 mm), the new time constant is 3 • Texit = 3 • Te2 • (gm • π)/τ = 0.055•37.5/(2•350)×π = 0.00925s; the corresponding exit field “tail” length would be Lexit ≈ 3Texit•U = 0.0925 × 112.7 = 1.0425 m.
Now these additional secondary currents are due to the motion of a short primary in front of a long secondary, and thus the dynamic end effects manifest themselves as follows:
The existence of additional secondary current density components both within the active zone (decaying with the Te2 time constant) and in the primary tail (x > 2pτ, decaying with Texit < 3 •Te2 in general).
Consequently, considering the primary core to be infinitely long would exaggerate grossly the exit dynamic end effect, though most 1–2 DLIM field theories rely on it [4,7–9]. It may be safe to say that this exit-end part of dynamic end effect (in the tail of LIM primary) produces only additional secondary losses (besides a small reluctance braking force [3]).
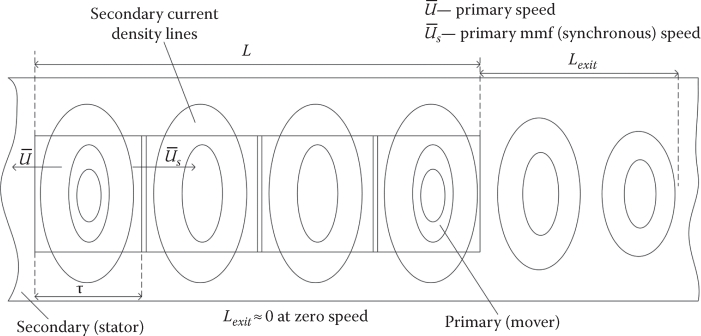
FIGURE 3.12 Secondary current density lines in a high-speed LIM (Lexit ≫ τ).
The dynamic end effect in the entry zone (x < 0) may be considered zero (Figure 3.11).
The dynamic end effect in active zone (0 ≤ x ≤ 2pτ) is the most important, and, as expected, it produces additional secondary current losses, demagnetization of the machine (a reduction of secondary power factor), and a dynamic end-effect force Fx end, which at zero slip may be propulsive (in lower goodness factor LIMs) or braking (for large dynamic end effect: high speed) (Figure 3.12).
Though there are two main types of primary windings, 2p pole single layer and 2p + 1 double layer (with half-filled end slots); they behave very similarly with respect to dynamic end effect. The two-step increase in primary mmf in the half-filled slots of entry end pole does not reduce the dynamic end effect if its attenuation length Lef is larger than a pole pitch τ. It suffices to consider, in a first approximation, not 2p + 1 poles but approximately L = 2pτ if p > 4.
Only the fundamental of primary mmf θ1(x, t) traveling wave is considered here (or its primary linear current sheet J1(x, t)); also, all variables vary sinusoidally in time.
The other effects, typical to a sheet secondary and large airgap, are lumped into the equivalent goodness factor Ge.
Other more subtle consequences of dynamic end effect will surface on the way of unfolding the quasi 1D field theory of LIMs in the following sections. We will call this a technical theory as it is suitable for design and for defining the circuit model parameters (with dynamic end effect) in the next chapter.
Let us consider the DLIM with the increased airgap in the primary core extended to infinity (Figure 3.13) but at larger airgap (τ/π).
Because we are dealing with a sinusoidal time and space variation of primary current sheet J1, complex variables may be used:
J¯1=Jm⋅ej⋅(ω1⋅t−πτx)(3.56)
Equation 3.56 is written in primary coordinates. We split the infinite-length model in three regions and apply Maxwell equations with a normal (single) airgap flux density component (along 0y) and a single variation, along the direction of motion x. The secondary current density has only one component Jz(x); the sinusoidal time variations are well understood.
The active zone (0 < x < 2pτ).

FIGURE 3.13 LIM model for technical field theory.
Ampere’s law along contour a1b1c1d1 in Figure 3.13 leads to
ge⋅∂H∂x=Jm⋅ej⋅(ω1t−πτx)+J2⋅dAL(3.57)
From Faraday’s law,
∂J2∂x=jω1⋅μ0⋅σe⋅dALge⋅Hy+μ0⋅U⋅σe⋅dALge⋅∂Hy∂x(3.58)
where
U is the relative speed of primary with respect to secondary
Hy is the resultant magnetic field in the airgap
From (3.57) through (3.58) we obtain
∂2Hy∂x2−μ0⋅σe⋅dALge⋅U⋅∂Hy∂x−j⋅ω1⋅μ0⋅U⋅σe⋅dALge=−j⋅πτ⋅ge⋅Jm⋅e−jπτx(3.59)
The characteristic equation of (3.59) is
γ2−μ0⋅σe⋅dALge⋅U⋅γ−j⋅ω1⋅μ0⋅σe⋅dALge=0(3.60)
with the roots
γ¯1,2=a12⋅(±√b1+12+1)±a12⋅j⋅√b1−12=γ1,2r±j⋅γr(3.61)
where
a1=μ0⋅σe⋅dALge⋅U=πτ⋅Ge⋅(1−S)(3.62)
b1=√1+(4Ge⋅(1−S)2)2(3.63)
The complete solution of (3.60) is
Ha=A⋅eγ1⋅x+B⋅eγ2⋅x+Bm⋅e−j⋅πτ⋅x(3.64)
Bn=j⋅τ⋅Jmπ⋅ge⋅(1+j⋅S⋅Ge)(3.65)
Entry zone (x ≤ 0) and exit zone (x ≥ 2pτ).
With no primary currents in these zones and an equivalent airgap gexit = τ/π (Gexit ≪ Ge),
Hentry=C⋅eγ1 exit, for x≤0(3.66)
Hexit=D⋅eγ2 exit⋅(x−2⋅p⋅τ) for x≥2pτ(3.67)
γ¯1 exit=(γ¯1)ge=τπGexit; γ¯2 exit=(γ¯2)ge=τπGexit(3.68)
The continuity conditions of magnetic field and current density at entry and exit ends (x = 0, 2pτ) yield
(Hentry)x=0=(Ha)x=0; (Hexit)x=2 pτ=(Ha)x=2 pτ(∂Hentry∂x)x=0=(J2)x=0; (∂Hexit∂x)x=2 pτ=(J2)x=2 pτ(3.69)
We may replace the second boundary condition in (3.69) by
∞∫−∞Hdx=0(3.70)
to get more realistic results.
However, using γ¯1
A=−j⋅JmΔ⋅(γ2β+S⋅Ge)⋅e−2p⋅τ⋅γ1B=j⋅JmΔ⋅(γ1β+S⋅Ge)
Δ=ge⋅(γ2−γ1)⋅(1+j⋅S⋅Ge) C=A⋅(1−e−2 p⋅τ⋅γ1) D=B⋅(1−e2 p⋅τ⋅γ2)(3.71)
To make a technical compromise, we may use the value of C and D from (3.71) into (3.66) through (3.67) and then calculate Jexit(x, t) (with Jentry ≈ 0) and the corresponding exit end secondary Joule losses at a more realistic value.
3.3.1 Dynamic End-Effect Waves
The airgap flux density in the airgap (active zone) Bag (μ0 • Ha in Equation 3.64) has a first conventional term (typical to rotary IMs: or for LIMs with “infinite length”) and two additional terms known as end-effect waves [1]: one forward wave µ0 • A • e2pτ−γ1 x and one backward wave (μ0·B·eγ¯2·x)
B¯end−=μ0⋅A⋅eγ1⋅x=−j⋅μ0⋅J1mΔ⋅(γ2β+S⋅Ge)⋅e(γ1r+j⋅γi)⋅(x−2pτ)(3.72)
B¯end+=μ0⋅B⋅eγ¯2⋅x(3.73)
B¯end+=j⋅μ0⋅J1mΔ⋅(γ1β+j⋅S⋅Ge)⋅eγ2r⋅x⋅e−j⋅γi⋅x(3.74)
They are also called entry end and exit end waves [1].
Both waves are characterized by the same pole pitch τe=1/γi, but they are attenuated along the direction of motion differently as |γ1r| ≫ γ2r (Equation 3.61). Typical values of 1/γ1r • τ and 1/γ2r • τ for a DLIM, as a function of goodness factor for two typical slip values (S = 0 and S = 0.08), are given in Figure 3.14 (based on Equation 3.61).
It is obvious that the entry end wave (Figure 3.14a) is penetrating a very short length (less than 10% of a pole pitch), and thus its effects may be neglected. In contrast, the exit-end wave penetration depth (Figure 3.14b) may be large and increases almost linearly with goodness factor.
For a DLIM, at 100 m/s and τ = 0.35 m and Ge ≈ 24–28, the exit end wave penetration depth would be about 6 pole pitches (2.1 m), not far away from the approximate prediction made earlier in this paragraph. For an urban LIM transport system U ≈ 30 m/s and τ = 0.25–0.3 m, still Ge ≈ 15–20 and thus the attenuation length of exit-end wave would be 4–5 pole pitches; consequently a LIM with 7–9 poles would experience a notable but perhaps still reasonable dynamic end effect.
Let us now explore the pole pitch of the exit-end wave τe/τ = 1/γi at S = 0 and 0.08 versus goodness factor (Figure 3.15, from (3.61)):
τeτ≈UseU=2Ge⋅(√1+16G2e⋅(1−S)−12)1/2(3.75)

FIGURE 3.14 Relative penetration depths of end-effect waves: (a) entry end wave and (b) exit end wave.
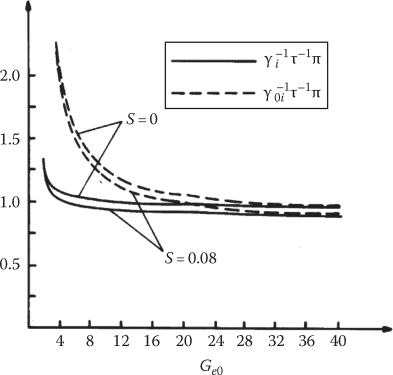
FIGURE 3.15 Relative pole pitch (τe/τ) of end-effect waves versus goodness factor for slip S = 0, 0.08. (After Nasar, S.A. and Boldea, I., Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001.)
It is very evident that, at small values of goodness factor (when the dynamic end (dynamic) effect is smaller anyway), the speed of end-effect waves is larger than the synchronous speed; so, as expected, at S = 0, the end-effect force has a braking character, thus reducing the mechanical power produced by the high-speed LIM.
As the LIM length for a vehicle may not go over 2–4 m due to necessity to negotiate tight curves, it seems that with Ge = 10–25 for LIMs from 30 to 120 m/s, the dynamic end effect will always be present. To improve performance, efficiency means to reduce end effects, and (or) optimal design methods should be used, as both conventional and end effects increase with the goodness factor.
3.3.2 Dynamic End-Effect Consequences in a DLIM
The main consequences of dynamic end effect are
Reduction of thrust
Higher secondary Joule losses (lower efficiency)
Higher absorbed reactive power (lower power factor)
Nonuniform airgap flux density, thrust, normal force along DLIM length
The thrust is composed of two components (conventional Fxc and end-effect force Fxe):
Fxc=μ0⋅a⋅J1⋅Re(2pτ∫0B*ndx)(3.76)
Fxe=μ0⋅a⋅J1⋅Re(2pτ∫0B*⋅eγ*2⋅x⋅e−j⋅β⋅xdx)(3.77)
The ratio of the two force components fe is
fe=FxeFxc=Re[B*⋅(−1+exp2p⋅τ⋅(y*2−j⋅β)y*2−j⋅β)]Re(B*n⋅2p⋅τ) =(1+S2⋅G2e)⋅Re[j⋅(γ1β+S⋅Ge)⋅(exp(2p⋅π⋅(γ*2β−j))−1)S⋅Ge⋅1β⋅(γ*2−γ*1)⋅(1−j⋅S⋅Ge)⋅2p⋅π⋅(γ*2β−j)](3.78)
Equation 3.78 is fairly general in the sense that the relative influence of dynamic end effect is dependent only on the number of poles 2p, slip S, and on the equivalent goodness factor Ge (which includes slot opening, airgap fringing, skin and edge effects, by correction coefficients). If we add the primary stack length transversally 2a and the primary electric current sheet Jn as variables, we see that the DLIM thrust is dependent only on five variables and only one of them, Ge, depends on secondary frequency, magnetic saturation, and other geometrical data of DLIM.
The end-effect force at zero slip switches from propulsion to braking mode with increasing Ge and decreasing number of poles (Figure 3.16).
For 2p = 8 poles, and different goodness factors, the dynamic end effect at small slips (Figure 3.17) shows how severely the end-effect braking character increases with the goodness factor Ge (implicitly with speed).
At low goodness factor values, the dynamic end-effect force changes from braking to propulsion mode once at small slip values, while for high goodness factors (high speed in general), it oscillates from propulsion to braking mode a few times (at a few slip values). As shown in a later chapter on LIM design, it is very tempting to choose as optimum goodness factor Ge0 its values for which the dynamic end-effect force at zero slip is zero [10]. Reasonable performance, without dynamic end-effect compensation, may be obtained this way, even for speeds up to 120 m/s. As Equation 3.61 shows, the airgap flux density (μ0 • Ha) amplitude varies along the DLIM primary length (Figure 3.18a):

FIGURE 3.16 Normalized dynamic end-effect force versus goodness factor at zero slip. (After Nasar, S.A. and Boldea, I., Linear Motion Electric Machines, John Wiley & Sons, New York, 1976.)
Ba=μ0⋅Bn⋅e−j⋅πτ⋅x+μ0⋅B⋅eγ2⋅x+μ0⋅A⋅eγ1⋅x(3.79)
Similarly, the secondary current density J2 amplitude will vary along primary length:
J2=gedAL⋅[γ1⋅A⋅eγ1⋅x+γ2⋅B⋅eγ2⋅x−j⋅S⋅Ge⋅e−j⋅β⋅x⋅J1ge⋅(1+j⋅S⋅Ge)](3.80)
Consequently, the thrust will vary along primary length due to dynamic end effect:
Fx=a⋅Re[2 pτ∫0(J2⋅B*a)dx](3.81)
This is illustrated in Figure 3.18b for an unusually large pole pitch τ (τ = 1 m, but for 2p = 6) and a reasonably low goodness factor Ge = 15.
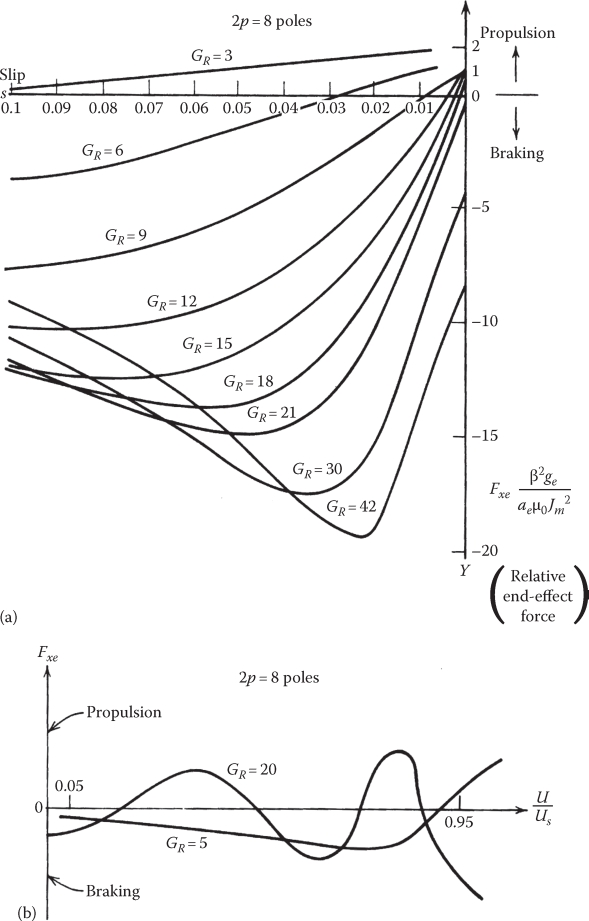
FIGURE 3.17 Normalized dynamic end-effect force versus slip for 2p = 8 poles and a few values of equivalent goodness factor values, (a), and the same force versus speed for low (Ge = 5) and high (Ge = 20 goodness factor and 2p = 8 poles), (b). (After Nasar, S.A. and Boldea, I., Linear Motion Electric Machines, John Wiley & Sons, New York, 1976.)
With an increased airgap in the primary tail, the decrease in the flux density after the end of primary core is much faster, as expected. We may now calculate the secondary power losses p2 and the reactive power (Q2):
p2=a⋅d2σe⋅ge⋅2 pτ+Lexit∫0(J2⋅J*2)dx(3.82)

FIGURE 3.18 Airgap flux density and thrust density along the primary length. (After Nasar, S.A. and Boldea, I., Linear Motion Electric Machines, John Wiley & Sons, New York, 1976.)
The secondary losses in the “tail” of primary (x > 2p • τ) are considered here, as introduced earlier in this paragraph:
Q2≈a⋅ω1⋅μ0⋅ge⋅2 pτ∫0(Ha⋅H*a)dx(3.83)
We may define a secondary (or airgap) efficiency η2 and power factor cos φ2 to emphasize the dynamic end effects on them; the primary losses are added to yield the total efficiency:
η2=Fx⋅UFx⋅U+p2; cos φ2=Fx⋅U+p2√(Fx⋅U+p2)2+Q22(3.84)
In the absence of dynamic end effect, η2i = 1 − S.
A typical example of η2 and cos φ2 results for a high-speed LIM (Us ≈ 120 m/s) with 2p = 12 and Ge = 31 shows acceptably good performance (Figure 3.19).
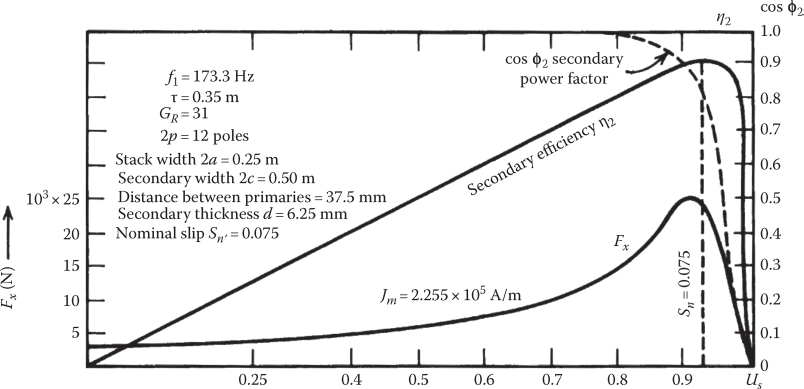
FIGURE 3.19 Secondary efficiency and power factor versus speed (p.u.) for a high-speed LIM (Us ≈ 120 m/s).
In addition, the dynamic end effect leads to a gradual increase in core flux density along primary length. Also, the nonuniformity of the secondary current density produces two nonuniformly distributed normal forces: an attraction force Fna
Fna≈μ0⋅a⋅2 pτ∫0|Ha|2dx(3.85)
and a repulsive one between one primary and the secondary
Fnr1≈μ0⋅a⋅d⋅Re[2 pτ∫02 pτ∫0Jm2⋅e−jβ⋅x1⋅J2(x)dxdx1⋅Δ1Δ21+(x−x1)2](3.86)
Δ1, Δ2 = g1, g2—the distances between the aluminum plate and the two primaries of a DLIM.
For the second primary,
Fnr2≈Fnr1Δ2Δ1(3.87)
After some approximations,
Fnr1≈2p⋅τΔ⋅π⋅μ0⋅a⋅Jm2⋅Re{γ*2⋅B*⋅[exp(γ*2−j⋅β)⋅2p⋅τ−1]γ*2−j⋅β+j⋅S⋅Ge⋅Jm⋅2p⋅τge⋅(1−j⋅S⋅Ge)}(3.88)
In a DLIM, the repulsive normal force acts as a spring trying to keep the secondary in the middle of the airgap (Δ2 = Δ1); it also has a small damping effect on this “normal” motion.
Now adding the attraction and repulsive force Fna and Fnr, we may get in a high-speed DLIM, a resultant repulsive force in the first half of primary with an attraction total force in the second part of primary length (the so-called “dolphin” effect [7]).
In a SLIM, this latter effect also exists, and in Equation 3.80 we have to use twice Jm (total primary current sheet) and ge in place of Δ.
If used for MAGLEVs, the SLIM normal forces, altered by the dynamic end effect, have to be considered in detail.
3.3.3 Dynamic End Effect in SLIMs
The technical theory of dynamic end effect applies in a similar way to SLIMs as it was developed in terms of equivalent airgap (ge) and goodness factor Ge, with the amendment that the latter depends heavily on speed and primary mmf (on magnetic saturation, in fact). The contribution of solid back iron of secondary (made of 1, 2, 3 “solid” laminations) is to be considered by the inclusion of skin and edge effects as marked by magnetic saturation. Only some final results [11] are given here for a high-speed SLIM with fn = 210 Hz, τ = 0.25 m, 2p + 1 = 13 poles (half-filled end slots), primary stack width 2a = 0.24 m, dAL = 4 mm, mechanical gap g = 12 mm, σAL = 2.16 × 107 Ω−1m−1, σi = 3.52 × 106 Ω−1m−1 turns per phase: W1 = 72, y/τ = 10/12 (chorded coils), primary current sheet amplitude J1 = 1.5 × 105 A turns/m.
Figure 3.20 shows the equivalent airgap and electric conductivity ratio for the three cases illustrating the influence of skin and edge effects and of secondary iron as additional conductive plate, versus slip; Figure 3.20b shows the secondary back-iron contribution to airgap increase (due to its magnetic reluctance).
The secondary back-iron penetration depth δi, the tangential flux density on its upper surface, and the equivalent goodness factor Ge versus slip at 400 A phase current J1 = 1.55 × 105 A turns/m are shown in Figure 3.21.
Finally, the thrust and normal forces (Fx, Fn) versus slip are illustrated in Figure 3.22a and the secondary efficiency and power factor in Figure 3.22b.
Airgap flux density, secondary current density, and the variation along primary length as influenced by dynamic end effect are similar to those presented for DLIM [11].
The SLIM and DLIM numerical examples related to dynamic end-effect technical (1D) field theory revealed results, which can be summarized as follows:
A quasi 1D theory of DLIM (and SLIM) may be developed simultaneously if the concept of equivalent airgap ge and equivalent goodness factor Ge are used to lump the slot opening, airgap fringing, and skin and edge effects.
The 2p • τ primary winding type of DLIM is not crucial in influencing the dynamic end-effect consequences of airgap flux, secondary current density, and force density distribution along primary length.
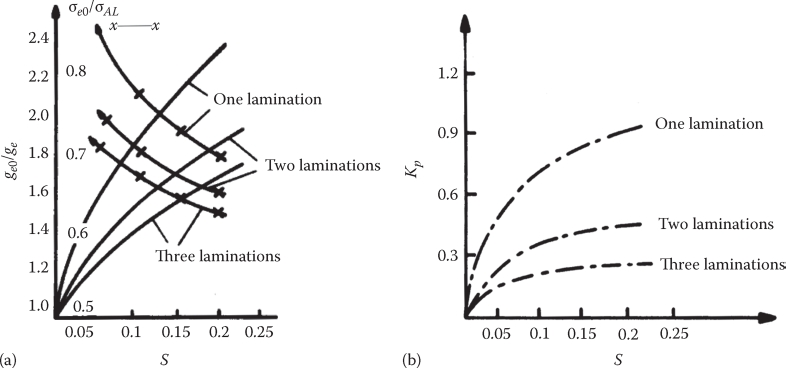
FIGURE 3.20 Equivalent airgap conductivity, (a), and p.u. secondary back-iron reluctance Kp versus slip for a high-speed SLIM with 1, 2, 3 “solid” lamination secondary back iron, (b). (After Nasar, S.A. and Boldea, I., Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001.)

FIGURE 3.21 Secondary back-iron penetration depth (δi) and surface-tangential flux density (Bxi), (a); equivalent goodness factor Ge versus slip (at 210 Hz and J1 = 1.55 × 105 A turns/m), (b). (After Nasar, S.A. and Boldea, I., Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001.)
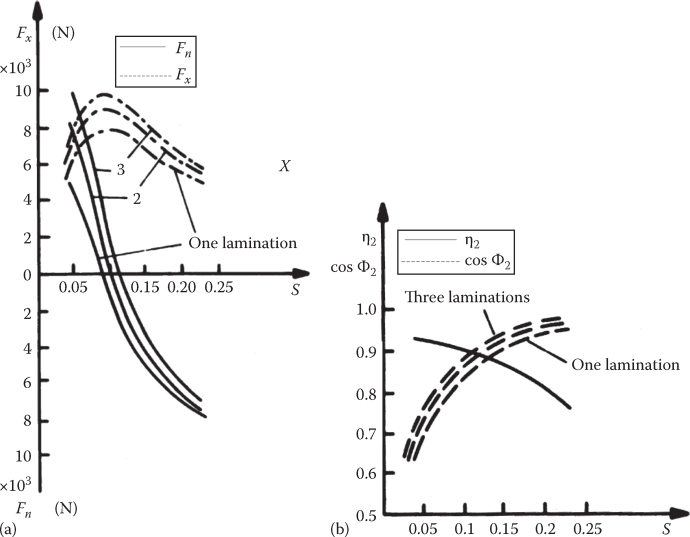
FIGURE 3.22 Secondary efficiency and power factor, (a); forces Fx, Fn versus slip for a high-speed SLIM, (b). (After Nasar, S.A. and Boldea, I., Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001.)
The dynamic end-effect force, produced by the forward (exit-end) or end-effect wave, is motoring at low Ge (low-speed) LIMs and braking in character at high Ge (high speed) at zero slip, indicating the great divide between low-speed and high-speed LIMs.
As the technical theory uses only five variables to characterize LIMs, with given slip S and geometry (Ge, ge, 2a (stack width) and primary electric current sheet Jm), it is fairly general and may be used in preliminary and optimal designs, as demonstrated indirectly in latter studies on LIMs for urban and interurban applications [12].
3.4 Summary of Analytical Field Theories of LIMs
As discussed in previous paragraphs, a complete analytical field theory of LIMs should account simultaneously for airgap slotting, airgap fringing, and skin and edge effect for the finite length of primary mmf distribution and of core length along the direction of motion.
Theoretically, such a theory was developed by using double Fourier decomposition of primary mmf along longitudinal (x) and transverse (z) directions and by variables separation; the magnetic field variation along airgap depth (y) may be thus calculated. To account for magnetic saturation and skin effect, the secondary for SLIM is decomposed into numerous layers of equivalent (but iteratively calculated) unique magnetic permeability. Also, the secondary back-iron length should be equal to aluminum sheet length to simplify the Fourier analysis along transverse direction, though it is feasible by proper boundary conditions to handle any back-iron width and also a secondary placed asymmetrically with respect to primary in the transverse direction.
For details see Ref. [13] (for DLIM) and [14, 15] (for SLIMs).
The Fourier series [16, 17] methods have been proposed for single-dimensional theories in third-order models [7] to deal with longitudinal end effect in DLIMs and SLIMs (with Al sheet on iron secondary [17] and with ladder winding [18, 19]).
On the other hand, Ref. [20] introduced a pole by pole unidimensional theory of dynamic end effect in DLIMs with remarkable insight into phenomena. However, for Fourier transform methods, the difficulty in calculating the self and mutual inductances and resistances of various fictitious secondary circuits (even in the absence of magnetic saturation) makes the method not easy to apply. Measuring these secondary–secondary and secondary–primary loops inductances by search coils may be a more practical way to get the circuit parameters required for the pole-by-pole method.
More recently, the wavelet analysis of LIM dynamic end effect was proposed [20] but apparently with no strong conclusion, yet, in terms of its practicality for LIM design or control.
Dynamic end effect in short-secondary (mover) and long-primary LIMs has also been studied [4,7,21] by analytical field theories but their applications are scarce. Wound-secondary doubly fed LIMs have also been investigated for short excursion (a few meters) transport applications, but their more practical theories are of circuit type and will be investigated in Chapter 4.
3.5 Finite Element Field Analysis of LIMs
The 3D nature of magnetic field distribution in LIMs with aluminum sheet on iron secondary, which experiences (in general) 2D current density trajectories, seems to suggest that the way to go is 3D-FEM. True, but from the start we need to mention that a complete analysis with thrust, normal force decentralizing lateral force, losses, efficiency, power factor, etc., versus speed characteristics would need, even today, tens of hours of computer time (Table 3.1, [22]), while the 3D analytical multiple-layer theory [14] would take a few minutes.
2D-FEM studies, one accounting for transverse (along 0z) and one accounting for slot opening, airgap fringing, and skin effect (along 0y), may be used to check (or duplicate) analytical results of equivalent airgap ge and secondary conductivities σe, σi with which a second 2D-FEM (in x,y plane) would include magnetic saturation in the primary and secondary back iron and the dynamic end effect. Such a study may reduce to hours (from tens of hours for 3D-FEM) the total computation time of main LIM curves discussed earlier.
To illustrate the FEM, as applied to LIMs in terms of computation effort, a dual flat 2p = 4 poles primary SLIM with aluminum sheet-on-iron secondary was investigated by 3D-FEM (Figure 3.23) [22]:
The computation time is very large and thus, its use is, still, advisable only for special cases (situations).
TABLE 3.1
Discretization Data and CPU Time


FIGURE 3.23 3D-FE mesh of LIM, (a); secondary eddy current density vectors, (b); thrust, (c); discretization data and computation time. (After Yamaguchi, T. et al., 3D FE analysis of a LIM with two armatures, Record of LDIA-2001, Nagano, Japan, pp. 300–303, 2001.)
A 2D-FEM investigation of a cage-secondary LIM is illustrated in Figure 3.24 [23].
As the amplitude of secondary depends on the contact resistance between the secondary bars and the sidebar (Rc), the normal force increases, the flux density distribution is perturbed, and the thrust decreases. The computation time is reasonable, and thus the 2D-FEM coupled circuit approach may be used extensively in LIM analysis.
3.6 Dynamic End-Effect Compensation
Though the dynamic end effect leads to a notable reduction of efficiency and power factor, the reduction of thrust in LIMs for transportation (urban at 20–30 m/s and interurban at up to 100–120 m/s) is a strong enough indicator expressing the ratio of end-effect thrust Fxe to conventional thrust (Fxe/Fxc(3.78)).
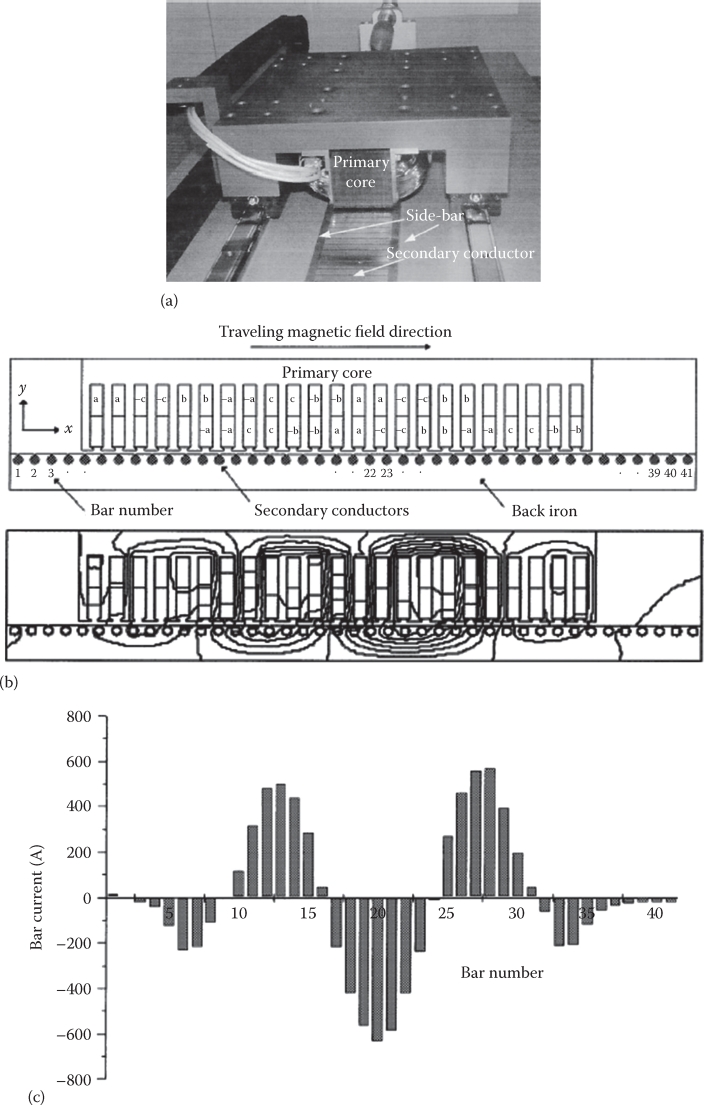
FIGURE 3.24 2D-FEM analysis of ladder cage-secondary SLIM: the lab model, (a), 2D model, (b), flux lines, (c), bar currents (Rc/Re = 0.5; Rc, Re—contact and side-bar segment resistances). (After Poloujadoff, M. and El Khashab, H., Eigen values and eigen functions: A tool to synthesize different models of LIMs, Record of LDIA-2001, Nagano, Japan, pp. 78–83, 2001.)
For the 30–120 m/s, at S = 0.1 the ratio Fxe/Fxc—dependent on Ge, 2p, S—varies in general in well-designed SLIMs in the interval of 0.2–0.6. This means a significant reduction of performance for high speed.
3.6.1 Designing at Optimum Goodness Factor
As both dynamic end effects and conventional performance grow with speed (with Ge increasing, for given 2p and S), it seems reasonable to assume that there is an optimum goodness factor Ge0. The criterion to calculate it depends on the objective function (max. thrust/primary weight, max thrust/Joule losses, max thrust per kVA at rated speed, etc.).
To simplify the problem and strike a compromise between criteria as mentioned previously, we use here the condition of zero end-effect force Fxe at S = 0 [10]:
(Fxe)S=0=0⇒Ge(2p)(3.89)
Solving Equation 3.78 iteratively, we get Ge(2p), illustrated in Figure 3.25.
As expected, the optimum goodness factor Ge0, which includes quite a few parameters such as pole pitch (τ), primary frequency (ω1), secondary equivalent conductivity (including skin effect and edge effect), and equivalent airgap (which includes slot opening, airgap fringing, secondary back-iron magnetic saturation), increases with the number of poles.
In general, designing at equivalent optimum goodness factor may reduce the end effect influence on total thrust at rated slip to 10%–15% at 30 m/s and 20%–25% at 120 m/s, under the condition that the maximum primary length is about 2.5 m for urban transportation and about 3.5 m for interurban vehicles, to facilitate negotiating tight curves. With pole pitches of 0.25–0.35 m, such conditions can be met.
3.6.2 LIMs in Row and Connected in Series
If further improvements are needed, a few SLIMs may be placed in row at a distance Lexit between each other (Figure 3.26a) [24].
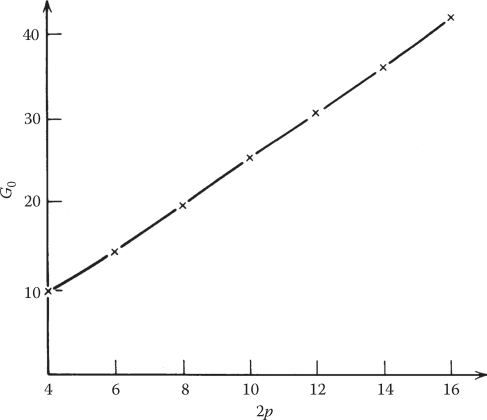
FIGURE 3.25 Optimum equivalent goodness factor Ge versus number of poles ((Fxe)S=0 = 0).
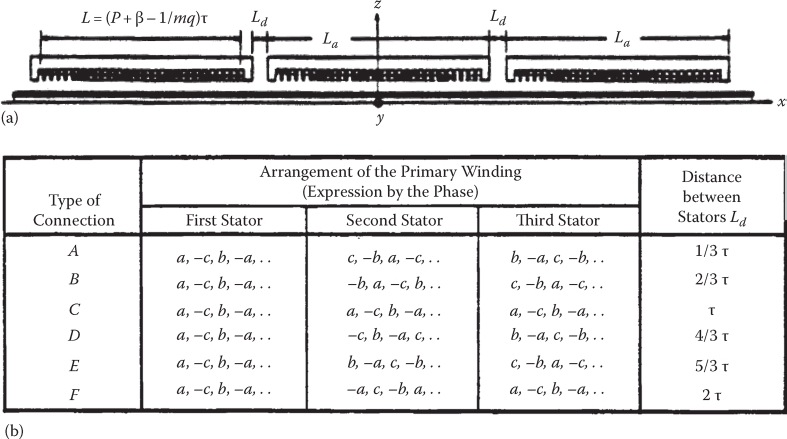
FIGURE 3.26 Series connection of SLIMs (a) 3 LIMs in series, (b) border of phases in 3 SLIMs in series.
The distance Lexit between the SLIMs in row is such that, at rated speed (slip), the exit end-effect magnetic flux density of first SLIM reaches the entry end of the next LIM at such an amplitude and phase that it reduces drastically the end-effect airgap flux density in the second SLIM. With Lexit= (1, 2, 3, 4, 5, 6) τ/3 and a certain sequence of phases (as in Figure 3.26b), such conditions can be met.
As illustrated in Ref. [24], the influence of dynamic end effect on thrust is thus reduced to, perhaps, 10% at 300 km/h for 3 SLIMs in row, 8 poles each, pole pitch τ = 0.3 m.
Besides these solutions, already in Refs. [1, 3], compensation windings in front of LIM have been proposed to reduce the dynamic end effects. But though the thrust has been increased, with slightly lower efficiency, there is apparently no progress in terms of total thrust/weight, which is essential in transportation.
3.6.3 PM Wheel for End-Effect Compensation
Quite a different dynamic end-effect compensation based on a PM wheel rotating at a speed slightly higher than SLIM speed and a pole pitch close to SLIM pole pitch has been proposed [25]—Figure 3.27.
At a certain core radius of PM wheel compensator (rc = 75 mm [25]), the torque (Figure 3.27d) would be zero. In such conditions, the improvement in thrust (Figure 3.27b), in power factor (Figure 3.27c), and in efficiency (Figure 3.27c) is evident and effective.
But the cost of the PM wheels and their drive (one for each SLIM on a vehicle) is not trivial (the PMs are very thick), and it is not yet proven whether using the optimum goodness factor design and placing of SLIMs in row is not less costly for equivalent performance. So the jury is still out on this issue of dynamic end-effect compensation (reduction).
3.7 Summary
LIMs are counterparts of rotary IMs.
To reduce the cost of the long secondary extended over the entire excursion length, the latter is made of an aluminum sheet on solid back iron (for SLIMs) or solely an aluminum sheet in DLIMs.
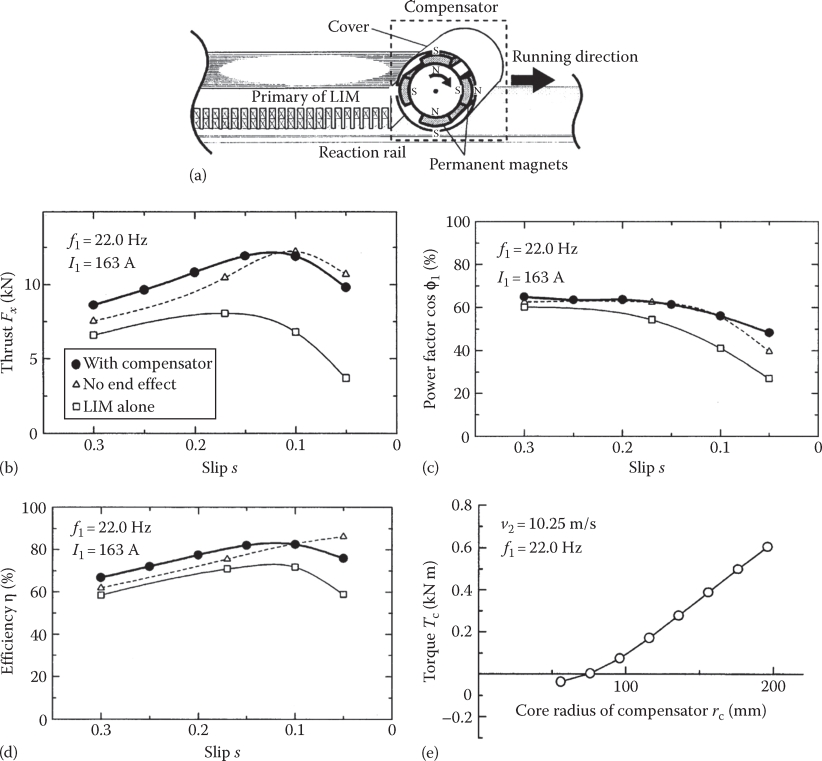
FIGURE 3.27 PM wheel for dynamic end-effect compensation; (a) the topology (2p = 8, τ = 0.28 m, f1 = 22 Hz, Sn = 0.17, v = 10 m/s); (b) thrust; (c) power factor; (d) efficiency; (e) torque of the PM wheel. (After Fuji, N. et al., End effect compensator based on new concept for LIM, Record of LDIA-2001, Nagano, Japan, pp. 102–106, 2001.)
The SLIM is favored since the secondary is more rugged and less costly in general.
Besides the thrust, the LIM also produces normal force, which in a SLIM is repulsive at high secondary (slip) frequency S*f1 and attraction in character for small slip frequency S*f1 values.
In SLIMs with ladder (cage) secondary, placed in a laminated (or even solid) core, however, the resultant normal force is of attraction character and, at Bg = 0.6 T in the airgap, it may produce a normal force Fn ≥ 6Fxn (thrust) and thus “cover” a good part of vehicle weight; a few additional controlled electromagnets would provide the rest of the normal force for a MAGLEV operation.
Single-layer 2p (even) pole-count or double-layer 2p + 1 (odd) pole-count three-phase windings are the most practical solutions for flat LIMs. Tubular LIM will be discussed in a later chapter dedicated to low-speed, low-excursion length (less than 2 m) applications.
Simplified three-phase windings may be used in some applications; among them typical 12 slot/10 pole modules (or other combinations) are good candidates for low-thrust, low-speed, low-excursion length (copper losses are reduced) applications.
Due to the open character of LIM magnetic circuit along 0x (direction of motion) in the presence of Gauss flux law, the back-iron flux (in primary and secondary) is not 50% of airgap pole flux, as in rotary IMs, but it has points, one pole pitch apart, where full airgap flux is reached; this is in fact so for 2p < 10; to avoid heavy saturation of back iron, the later has to be designed with adequate depth (and limited pole pitch).
In LIMs with 2p < 6 (2p + 1 < 7), the self and mutual inductances between the three phases of primary are different from each other, and thus the phase currents are not symmetric; this is called the static end effect and should be accounted for in LIM control, to avoid thrust pulsations.
Skin effect is present in the LIM secondary (at frequency f2 = S*f1); a decrease in aluminum equivalent conductivity due to skin effect by a coefficient KR skin > 1 is used for a practical design.
Skin effect is also manifest in the secondary solid back iron of SLIM, but here the magnetic saturation makes it more difficult to ascertain; for a given airgap flux density, tangential flux density Btmax and the depth of field penetration δiron may be found iteratively, based on the B(H) curve of mild solid iron.
As the ratio of magnetic airgap gm= gair+ gAL to pole pitch τ may reach 0.1, there is notable flux fringing (by 2D field distribution in the airgap “in the absence” of secondary conductivity) in the airgap, and a correction coefficient kFg > 1 increases gm to account approximately for this phenomenon.
Though the magnetic airgap gm (or gm/2 in DLIMs) is rather large, the stator slot opening may be large enough (open slots for preformed primary coils) to produce a few percent of airgap pole flux reduction, and the Carter coefficient Kc > 1 (in a recent formulation) may be used to account for it (ge= Kcgm).
So the slot opening and airgap fringing lead to an increased equivalent airgap ge = kckFggm.
Similarly, the equivalent secondary conductivity is decreased by skin effect σAlc = σAL/Kskin.
With ge and σAlc, the transverse edge effect is approached; the transverse edge effect reflects the existence of two components Jz, Jx of secondary current density in the active zone (under LIM primary). The consequence is a nonuniform distribution of normal flux density along the transverse direction and additional Joule losses in secondary. In essence, two correction coefficients may account for this effect: the further reduction of secondary conductivity σe= σeA/kTR and an increase in the airgap get= ge/kx (kx ≤ 1, kTR > 1).
For SLIMs, the equivalent airgap will further increase due to magnetic saturation: gete= get (1 + ks), and the equivalent aluminum conductivity will increase to σse (3.46), to account for secondary solid iron conductivity and magnetic reluctance, approximately. When the secondary is placed asymmetrically (in the transverse direction), a decentralizing lateral force occurs due to transverse edge effect.
With the equivalent airgap and secondary conductivity, the dynamic end effect may be approached in a 1D field (technical) theory.
The dynamic end effect occurs as new secondary sections enter the airgap magnetic field zones. Thus, additional secondary currents are induced at LIM primary entry.
These additional secondary currents “born” at entry end decay toward the LIM primary end with the secondary electric time constant Te ≈ Ge/ω1, Ge = µ0 (τ2ω1/π2) (σtedAL/gte).
Ge is the goodness factor or the Reynolds magnetic number; it may be shown that Ge is equal to Xm/R′2 with Xm—magnetization reaction, R′2—secondary resistance.
It has been demonstrated that the influence of dynamic end effect depends essentially on Ge, S, 2p, 2a (stack width). Ge is a key variable, whose influence on performance is very strong.
The influence of dynamic end effect on airgap flux distribution (which becomes more and more nonuniform as the speed (or Ge) increases, for low slip values and ae given and for given number of poles of primary). The end effect is basically portrayed by the so-called exit-end forward wave Bexit, which decays slowly (with Te time constant), along primary length.
The pole pitch of Bexit, τe at S = 0 is larger than the primary mmf wave pole pitch τ for low values of Ge, and thus the end-effect thrust is motoring: for larger Ge, τe ≤ τ and thus the end-effect thrust is braking.
So, in high-speed LIMs (with high dynamic end effect), the end-effect thrust at S = 0 (or for S < 0.1) is braking.
Additionally, the dynamic end effect produces a reduction in power factor, efficiency, and thrust (power) in large speed (large Ge) LIMs.
To reduce the dynamic end effect, an optimal goodness factor Ge would be a reasonable compromise because both longitudinal end-effect intensity and conventional performance increase with Ge.
A Ge defined simply as corresponding to zero end-effect force at S = 0 seems a reasonable compromise [10]. Ge depends solely on 2p (pole counts) and increases rather linearly with 2p (Ge = 10 for 2p = 4 and Ge = 30 for 2p = 10).
Placing 2–3 LIMs in row at a precalculated distance (in between) and connected in series may produce further reduction in dynamic end effects.
Compensation windings have been proposed at the entry end of LIM [25, 26] to reduce the dynamic end effect in the main LIM; still no such solutions have been applied as they are not clearly superior in global performance/cost terms.
A PM wheel speeding above LIM speed and placed in front of LIM primary [27] was shown to produce better overall performance at zero torque of the wheel; still, the additional cost of the PM wheel makes the solution application at best a future goal.
As the LIM field analysis [28], a must for design, has been approached in this chapter, the circuit model, needed for dynamics and control, is the aim of the next chapter.
References
1. S. Yamamura, Theory of Linear Induction Motors, John Wiley & Sons, New York, 1972.
2. I. Boldea and L. Tutelea, Electric Machines, CRC Press, Taylor & Francis, New York, 2009.
3. S.A. Nasar and I. Boldea, Linear Motion Electric Machines, John Wiley & Sons, New York, 1976, Chapter 1.
4. S.A. Nasar and I. Boldea, Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001, Chapter 3.
5. E. Matagne, Slot effect on the airgap reluctance Carter-like calculation suitable for electric machines with large air-gap or surface mounted permanent magnet, Electromotion, 15(4), 2008, 171–176.
6. H. Bolton, Transverse edge effect in sheet rotor induction machines, Proc. IEE, 116, 1969, 725–739.
7. E.R. Laithwaite, Induction Machines for Special Purposes, G. Newness, London, U.K., 1966.
8. M. Poloujadoff, The Theory of Linear Induction Motors, Clarendon Press, Oxford, U.K., 1980.
9. J.F. Gieras, Linear Induction Drives, Oxford University Press, Oxford, U.K., 1992.
10. I. Boldea and S.A. Nasar, Optimum goodness criterion for linear induction motor design, Proc. IEE, 123(1), 1976, 89–92.
11. I. Boldea and S.A. Nasar, Improved performance of high speed single-sided LIMs: A theoretical study; EMELDG International Quarterly (now EPCS Taylor & Francis), 2(2), 1978, 155–166.
12. I. Boldea and S.A. Nasar, Optical design criterion for linear induction motors, Proc. IEEE, 123(1), 1976, 89–92.
13. K. Oberretl, Three dimensional analysis of the linear motor taking into account edge effects and winding distribution, Arch. Electrotech., 55, 1973, 181–190.
14. I. Boldea and M. Babescu, Multilayer approach to the analysis of single-sided linear induction motors, Proc. IEE, 125(4), 1978, 283–285.
15. I. Boldea and M. Babescu, Multilayer approach of d.c. linear brakes with solid iron secondary, Proc. IEE, 123(3), 1976, 220–222.
16. K. Budig, Linear A.C. Electric Motors, VEB Verlag, Berlin, Germany, 1974 (in German).
17. S. Nonaka, Simplified Fourier transform method of LIM analysis based on space harmonic method, Record of LDIA-1998, Tokyo, Japan, 1998, pp. 187–190.
18. K. Oberretl, Single sided linear motor with ladder type secondary, Archiv fur Electrotechnik, 56, 1974, 305–319 (in German).
19. M. Fujii, Analysis of cage type LIM with ladder shaped pole pitch conductors, Record of LDIA-1998, Tokyo, Japan, 1998, pp. 191–194.
20. T. Sugixama and S. Torii, An establishment of the wavelet analysis of LIM aimed at analyzing end effect, Record of LDIA-2001, Nagano, Japan, 2001, pp. 310–314.
21. T. Onuki, K. Yoshihida, K. Yushi, and H. Forekmasa, An approach to a suitable secondary shape for improving the end effect of a short rotor DLIM, LDIA-1995, Nagasaki, Japan, 1995, pp. 369–372.
22. T. Yamaguchi, Y. Kawase, M. Yoshida, M. Nagai, Y. Ohdachi, and Y. Saito, 3D FE analysis of a LIM with two armatures, Record of LDIA-2001, Nagano, Japan, 2001, pp. 300–303.
23. M. Poloujadoff and H. El Khashab, Eigen values and eigen functions: A tool to synthesize different models of LIMs, Record of LDIA-2001, Nagano, Japan, 2001, pp. 78–83.
24. S. Nonaka and M. Fuji, The series connection of short stator LIMs for intercity transit, Record of International Conference on MAGLEV and Linear Devices, Las Vegas, NV, 1987, pp. 23–29.
25. N. Fuji, Y. Sakumoto, and T. Kayasuga, End effect compensator based on new concept for LIM, Record of LDIA-2001, Nagano, Japan, 2001, pp. 102–106.
26. T. Kaseki and R. Mano, Flux synthesis of a LIM for compensating end effect based on insight of a control engineer, Record of LDIA-2003, Birmingham, U.K., 2003, pp. 359–362.
27. N. Fujii, T. Hashi, and Y. Tanabe, Characteristics of two types of end effect compensators for LIM, Record of LDIA-2003, Birmingham, U.K., 2003, pp. 73–76.
28. J.L. Gong, F. Gillon, and P. Brochet, Linear induction modeling with 2D and 3D finite elements, Record of ICEM 2010, Rome, Italy, 2010.