 Connecting the servo controller to the BeagleBone Black
by Richard Grimmett, Rodolfo Giometti, Charles Hamilton
BeagleBone: Creative Projects for Hobbyists
Connecting the servo controller to the BeagleBone Black
by Richard Grimmett, Rodolfo Giometti, Charles Hamilton
BeagleBone: Creative Projects for Hobbyists
- BeagleBone: Creative Projects for Hobbyists
- Table of Contents
- BeagleBone: Creative Projects for Hobbyists
- Credits
- Preface
- 1. Module 1
- 1. Setting Up for the First Time
- Introduction
- First boot up
- Power requirements – basic guidelines
- Display
- Essential GNU/Linux commands – the command shell
- Essential GNU/Linux commands – typical commands
- Getting ready
- System navigational command – change your directory – cd
- How to do it…
- There's more…
- System navigational command – show your current directory – pwd
- How to do it…
- System navigational command – find a file – find
- How to do it…
- Device and system insight – shows what's inside a directory – ls
- How to do it…
- Device and system insight – find out what USB devices are connected – lsusb
- How to do it…
- Device and system insight – get information about connected devices – cat/proc/bus/input/devices
- How to do it…
- There's more…
- Device and system insight – get your version of Linux
- How to do it…
- Device and system insight – find out running processes – ps
- How to do it…
- Device and system insight – find out the resources used by running processes – top and htop
- How to do it…
- Device and system insight – quitting processes – kill
- How to do it…
- Device and system insight – message reports – dmesg
- How to do it…
- Device and system insight – shows disk space – df -h
- How to do it…
- Device and system insight – explore network – Ifconfig
- How to do it…
- Modify content / data commands – make a new directory – mkdir
- How to do it…
- Modify content/data commands – remove a file or directory – rm
- How to do it…
- Modify content / data commands – download files – wget
- How to do it…
- There's more…
- Modify content / data commands – open a tar file – tar [options]
- How to do it…
- There's more…
- Modify content / data commands – clean up files – autoclean
- How to do it…
- Modify content / data commands – purge a package – apt-get purge, apt-get remove --purge
- How to do it…
- Modify content/data commands – shutdown the system – [options]
- How to do it…
- See also
- Edit a text file from the command shell
- Connectivity
- Package management – Installing packages using apt-get
- SSH / Remote access
- System images
- 2. Basic Programming Recipes
- 3. Physical Computing Recipes Using JavaScript, the BoneScript Library, and Python
- 4. Exploring GNU/Linux Recipes Using Bash, Autotools, Debugger, and systemd
- Introduction
- The basic shell script
- Epoch Time shell script
- Compile and install
- Compile and install Git from source
- Debugging
- Debug a simple C-code application from the command line using GDB
- Debug an application remotely from Eclipse and GDB server
- systemd services
- Basic commands for systemd services
- Optimize boot time
- Create a systemd service to run at boot time
- 5. Basic Programming Recipes with the Linux Kernel
- Introduction
- Kernel application binary interface
- Installing the latest kernel image
- Installing and building a custom kernel
- Interactions with the kernel – sysfs entries and controlling the GPIOs
- Device Tree and its roots
- Device Tree / basic build
- Device Tree / advanced – adding DT overlay to run a custom cape
- Universal cape overlay
- Running a script to check DT usage on GPIO pins
- 6. Run Faster, Run Real Time
- 7. Applied Recipes – Sound, Picture, and Video
- 8. The Internet of Things
- 9. The Black in Outer Space
- Introduction
- Grabbing the International Space Station flyover data and visualizing it
- Tracking using RTL-SDR
- Airplane tracking with RTL-SDR
- Satellite tracking using GPredict and RTL-SDR
- Satellite tracking using the SatNogs Network client / ground station and RTL-SDR
- Adding other interfaces – ISS tracking and text to speech
- 1. Setting Up for the First Time
- 2. Module 2
- 1. Dangerous Gas Sensors
- 2. Ultrasonic Parking Assistant
- 3. Aquarium Monitor
- 4. Google Docs Weather Station
- 5. WhatsApp Laundry Room Monitor
- 6. Baby Room Sentinel
- 7. Facebook Plant Monitor
- 8. Intrusion Detection System
- 9. Twitter Access Control System with Smart Card and RFID
- 10. A Lights Manager with a TV Remote Controller
- 11. A Wireless Home Controller with Z-Wave
- 3. Module 3
- 1. Preparing the BeagleBone Black
- 2. Building a Basic Tracked Vehicle
- 3. Adding Sensors to Your Tracked Vehicle
- 4. Vision and Image Processing
- 5. Building a Robot that Can Walk
- Building robots that can walk
- Working of servomotors
- Building the quadruped platform
- Using a servo controller to control the servos
- Communicating with the servo controller via a PC
- Connecting the servo controller to the BeagleBone Black
- Creating a program on Linux to control your quadruped
- Issuing voice commands to your quadruped
- Summary
- 6. A Robot that Can Sail
- 7. Using GPS for Navigation
- 8. Measuring Wind Speed – Integrating Analog Sensors
- 9. An Underwater Remotely Operated Vehicle
- 10. A Quadcopter
- 11. An Autonomous Quadcopter
- Bibliography
- Index
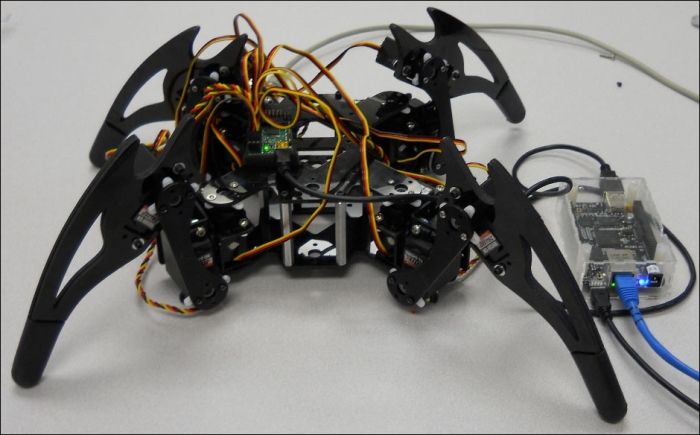
You've checked the servomotor controller and the servos. You'll now connect the motor controller to the BeagleBone Black and make sure you can control the servos from it. Remove the USB cable from the PC and connect it to the BeagleBone Black. The entire system will look like this:
Let's now talk to the motor controller by downloading the Linux code from Pololu at www.pololu.com/docs/0J40/3.b. Perhaps the best way is to log in to your BeagleBone Black using PuTTY, then type wget http://www.pololu.com/file/download/maestro-linux-100507.tar.gz?file_id=0J315. Then move the file by typing mv maestro-linux-100507.tar.gz?file_id=0J315 maestro-linux-100507.tar.gz. Unpack the file by typing tar –xzfv maestro_linux_011507.tar.gz. This will create a directory called maestro_linux. Go to that directory by typing cd maestro_linux and then type ls. You should see something like this:

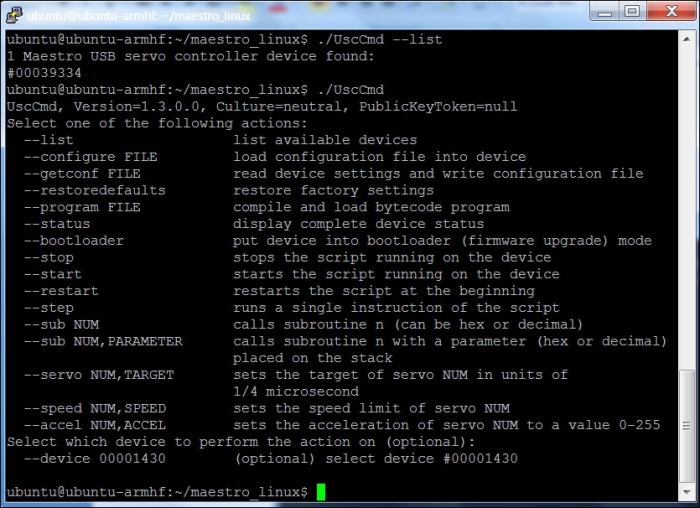
The README.txt document will give you explicit instructions on how to install the software. Unfortunately, you can't run MaestroControlCenter on your BeagleBone Black. Your version of Windows doesn't support the graphics, but you can control your servos using the UscCmd command-line application to ensure that they are connected and working correctly. First, type ./UscCmd --list and you should see something like the following screenshot:

The unit sees our servo controller. By just typing ./UscCmd, you can see all the commands that you can send to your controller, as shown in the following screenshot:
Note that although you can send a servo a specific target angle, the target is not in angle values, so it makes it a bit difficult to know where you are sending your servo. Try typing ./UscCmd --servo 0, 10. The servo will move to its maximum angle position. Type ./UscCmd – servo 0, 0 and it will prevent the servo from trying to move. In the next section, you'll write some Python code that will translate your angles to the commands that the servo controller will want to receive to move it to specific angle locations.
-
No Comment