
4 Linear Induction Motors
Circuit Theories, Transients, and Control
4.1 Low-Speed/High-Speed Divide
Field theories presented in Chapter 3 proved static and dynamic end effects as the main differences between rotary and linear induction motors.
Other specific phenomena related to the conductive sheet (alone or one placed on solid iron) such as edge effects, besides skin effect, airgap fringing, and primary slot opening influence on performance, have been reduced to equivalent correction coefficients on airgap (ge) and on secondary sheet electrical conductivity σe.
The dynamic end effect divides the LIMs into high-speed (when this effect counts) and low-speed LIMs when the dynamic end effect is negligible. It is not so easy to hammer out a border between the two cases, but a first approximation would be to consider a LIM as of low speed if the exit end wave penetration depth along motion direction 1/γ2r (3.61–3.62) is less than 10% of primary length (2 · p · τ):
1γ2r<2⋅p⋅τ10(4.1)
As γ2r depends on the equivalent goodness factor Ge, slip S, and pole pitch τ [1],
γ2r=a12(1−√1+b12)(4.2)
a1=πτ⋅Ge⋅(1−S); b1=√1+16G2e⋅(1−S)4(4.3)
Condition (4.1) becomes
p⋅π⋅Ge⋅(1−S)⋅(1−√1+b12)>10(4.4)
As this condition depends only on equivalent goodness factor Ge, slip S, and number of poles 2p, it may be simply represented on a fairly general graph (Figure 4.1).
The intersection of continuous and interrupted lines in Figure 4.1 for a given slip S suggests compliance with condition (4.1).
For example, at S = 0.1, for 2p = 4, 6, 8, there is no low-speed solution but for 2p = 10 there is one with large Ge (and good performance): Ge = 21.
Also for 2p = 12, S = 0.05, there is a solution at Ge = 25; for S = 0.1 and for 2p = 12, a larger Ge is allowed (Ge = 35!). Values of Ge larger than 25 correspond in general to well-designed highspeed LIMs (100–110 m/s): the optimum goodness factor Ge for 2p = 12 is Ge0 = 27 in Figure 3.26.
FIGURE 4.1 Exit end effect wave (interrupted lines) penetration depth per pole pitch versus Ge for given p and S (slip). (After Boldea, I. and Nasar, S.A., Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001.)
Therefore, the optimal goodness factor is rather close to the condition that the penetration depth of exit end effect wave equals only 10% of primary length; this means that, grossly, the end effect influence on thrust reduction at rated slip is less than 10%.
Now we may proceed to the investigation of circuit models, transients, and control of low-speed LIMs as they resemble rotary IMs, though dedicated circuit parameter expressions for flat (and tubular) LIMs with Al-on-iron and for ladder secondary have to be derived.
4.2 Lim Circuit Models without Dynamic end Effect
There are a few basic topologies for low-speed LIMs:
Flat DLIMs with Al sheet secondary
Flat SLIMs with Al-on-iron secondary
Flat SLIMs with ladder secondary
Tubular SLIMs with cage secondary
We will derive the equivalent circuit model with its parameter expressions for all these configurations, one by one.
Note: Short secondary (mover) long primary (stator) LIMs are not considered here as their applications are still uncertain (due to strong competition from dc excited or PM linear synchronous machines).
4.2.1 Low-Speed Flat DLIMs
Double-sided LIMs use an aluminum sheet secondary with a thickness dAL and an equivalent electrical conductivity σAle, which accounts for transverse (edge) effect and skin effect:
σAle=σAlktr⋅kskin(4.5)
In addition, the equivalent magnetic airgap ge accounting for slot opening (by Carter coefficient kc), airgap fringing (kfg), and stator yoke magnetic saturation coefficient kss is
geAl=(2⋅g+dAL)⋅kc⋅kfg; kc>1,kfg≥1(4.6)
The equivalent goodness factor Ge is
Ge(ω1)=μ0⋅ω1⋅τ2π2⋅σAle(Sω1)⋅dAlgeAl⋅(1+kss)(4.7)
as the other definition of goodness factor is
Ge(ω1)=Xm(ω1)R′2; Xm=ω1⋅Lm(4.8)
But in the absence of end effects, the magnetization inductance Lm(ω1) is (as for rotary IMs)
Lm(ω1)=6⋅μ0⋅(2⋅ae)⋅(kw1⋅W1)2⋅τπ2⋅p⋅geAl⋅(1+kss)=kXm⋅W21(4.9)
where
2a is the stack width
ae ≈ a + geAl/2
2p is the pole count
W1 is the turns in series per phase
kw1 is the winding factor
Consequently, the secondary phase equivalent resistance (reduced to the primary) is from (4.7) through (4.9) (Figure 4.2):
R′2(sω1)=XmGe=12⋅ae⋅(kw1⋅W1)2dAL⋅τ⋅p⋅σeAl=kR′2⋅W21(4.10)
For the aluminum sheet, due to its small thickness (4–6 mm), the leakage inductance, skin [2], and transverse edge effects may be neglected for low speed (low goodness factor: SnGe ≪ 1).
FIGURE 4.2 DLIM: (a) longitudinal cross section and (b) transverse cross section.
FIGURE 4.3 LIM equivalent circuit.
As expected, the equivalent circuit (Figure 4.3) will be similar to that of rotary IMs, with the observation that Xm = ω1 · Lm and R′2 vary with slip frequency Sω1, with current I1 (through magnetic saturation), and with airgap geAL.
To complete the expressions of equivalent parameters, R1 and L1l are
R1≈1σco⋅(4⋅a+2⋅lec)W1⋅I1rated⋅W21⋅jc0rated=kR1⋅W21(4.11)
where
lec is the primary coil end connection length
jc0rated is the rated design current density
W1 · I1rated is the rated phase Ampere turns per phase (RMS)
σco is the copper electrical conductivity
L1l≈2⋅μ0p⋅q⋅[(λslot+λdiff)⋅2a+λend⋅lec]⋅W21=k1l⋅W21(4.12)
where
λslot is the slot nondimensional (specific) permeance λs = h1s/(3 · b1s) for open slots
λdif3f is the differential leakage specific nondimensional permeance (as the airgap ge/τ ratio is rather large, λdiff < 0.2–0.25)
λend is the coil end connection specific permeance: λe ≈ 0.66q, for single-layer windings (Figure 4.2), and λe ≈ 0.33q, for double-layer windings
Note: The 2p = 2 pole primitive LIM in Figure 4.1 is characterized by asymmetric phase currents when fed from symmetric ac phase voltages, due to the fact that phase C is in a different position with respect to primary core ends. To calculate more correctly the behavior of such a LIM, the self and mutual inductances between primary phases and primary/secondary have to be calculated based on field theories. The equivalent circuit in Figure 4.2 would produce good results only for the positive symmetric component of the currents. From 2p = 6 onward, this static end effect becomes negligible.
We may advance the circuit theory by calculating the thrust Fx, efficiency (η1), power factor (cos φ1), and normal force (Fn). Based on the electromagnetic power definition,
Fx=3⋅(I′2)2⋅R′22⋅τ⋅f1⋅S=3⋅π⋅Lm⋅I21⋅S⋅Geτ⋅(1+S2⋅G2e)(4.13)
η1=Fx⋅2⋅τ⋅f1⋅(1−S)Fx⋅2⋅τ⋅f1+3⋅R1⋅I21+3⋅Rcores⋅I2m(4.14)
Rcores represents the primary core losses (as in rotary IMs) and is to be calculated in the design stage or measured in adequate tests:
cosφ1=Fx⋅2⋅τ⋅f1+3⋅R1⋅I21+3⋅Rcores⋅I2m3⋅V1⋅I1(4.15)
The large airgap/pole pitch ratio (ge/τ) leads to rather low primary power factor (cos φ1 = 0.4–0.55). The normal force Fn, between primaries and secondary in DLIM has two components:
An attraction force, Fna, between the two primary magnetic cores
A repulsion force, Fnr, between primary and secondary mmfs
In the absence of end effects, Fna is simply
Fna=(2⋅ae)⋅B2g1⋅(2⋅p⋅τ)2⋅μ0(4.16)
Bg1 (3.65) is the airgap flux density peak value under load:
Bg1=μ0⋅τ⋅J1mπ⋅geAL⋅(1+kss)⋅(1+j⋅sGe); J1m=3√2⋅(W1⋅km1)⋅I1p⋅τ(4.17)
Fna=ae⋅2⋅p⋅τ3⋅μ0⋅J21mπ2⋅g2eAL⋅(1+kss)2⋅(1+S2⋅G2e)(4.18)
To calculate Fnr, the repulsion force, we need the tangential component of airgap flux magnetic field Hx on the primary surface:
Hx=J1m; Bx=μ0⋅J1m(4.19)
Fnr≈4⋅μ0⋅ae2.τ⋅p⋅dAL⋅Re[J¯*2J1m](4.20)
J2 is the secondary current density:
J¯2=S⋅ω1⋅σeAL⋅τπ⋅B¯g1(4.21)
Fnr≈2⋅ae⋅τ⋅S⋅ω1⋅σeAL⋅dAL⋅(τπ)2⋅(μ0⋅J1m)2⋅S⋅GegeAL⋅(1+kss)⋅(1+S2⋅G2e)(4.22)
Finally,
Fn≈2ae⋅p⋅μ0⋅J21m⋅τ3π2⋅g2e⋅(1+kss)2⋅(1+S2⋅G2)⋅(1−π2⋅g2eAL⋅(1+kss)2⋅S2⋅G2eτ2)(4.23)
As visible in (4.23), in the low slip region the normal force is of attraction character (positive) while it becomes repulsive (negative) at large slip values.
In low-speed LIMs, in general at rated slip (S = 0.1–0.15), the normal force is of attraction type. The zero net normal force occurs at a rather large S*f1 = f2 (secondary frequency), which leads to lower efficiency.
As in general the maximum thrust per given mmf (J1m, linear current sheet)—I1 is obtained from (4.13):
∂Fx∂S=0; Sk⋅Ge=1.(4.24)
Condition (4.24) for a low-speed LIM with low end effect (Figure 4.1) is not easy to reach and, for example, for Ge = 10, Sk = 0.1, it implies 2p = 8.
Now for Ge = 10, τ = 0.2 m, dAL = 8 mm, ge = 20 mm, σe = 2.7 · 107 (Ω m)–1, and kss = 0,1, it would mean f1 (from (4.7)) is 29 Hz. This would lead to a synchronous speed Us = 2 · τ ·f1 = 2 × 0.2 × 29 = 11.6 m/s and the LIM speed U = Us · (1 – Sk) = 11.6 · (1–0.1) = 10.49 m/s.
As evident in this numerical example, condition (4.24) at S = 0.1 implies a fairly large LIM (1.6 m) and a notable speed (10 m/s), to secure low (negligible) end effect. In low-speed (<3 m/s) applications, the maximum thrust/current should be placed at large Sk to fulfill condition (4.24) Sk = (0.5–1).
As expected, both motoring and regenerative braking operation modes are feasible. As variable frequency supply is a must in LIM drives, to secure variable speed, the control of slip frequency S · ω1 and of the primary current offers the first option for thrust (or speed) control of LIMs (Figure 4.4).
FIGURE 4.4 Repulsion Fx and normal Fn forces of DLIM.
Note: When the secondary is placed asymmetrically in the airgap (closer to one of the two primaries), the self-aligning character of repulsive force centralizing component (Chapter 3) becomes visible (for details see (3.8)). Also, when the primary is placed laterally asymmetric in the airgap, a decentralizing force is developed by the interaction of longitudinal secondary current density and the airgap flux density (Figure 3.8c).
4.3 Flat SLIMs with Al-On-Iron Long (Fix) Secondary
As shown in Chapter 3, the presence of the solid back iron (made of 1 or 2 or 3 “laminations” in SLIMs (Figure 4.5)), in order to reduce eddy currents and increase the field penetration depth, may be treated as a modification of aluminum sheet electric conductivity, the occurrence of a magnetic reluctance of iron, and, eventually, of a small leakage inductance of secondary eddy currents paths. Other than that, the equivalent circuit theory of SLIM resembles that of DLIM.
Basically,
σeAL=σALkTRkskim→σeALi=σeAL⋅(1+ki)(4.25)
gea=g⋅kc⋅kFg→geai=gea⋅(1+kss)(4.26)
kss=2τ2π2⋅μ02⋅(g+hAL)⋅δi⋅μirom; ki=σiσAL⋅δikti⋅ktrAl(4.27)

FIGURE 4.5 SLIM transverse cross section: equivalent cross section with ideal secondary back iron.
If the redistribution due to limited primary length is considered, the back-iron flux is
Bti⋅δi=Bg1⋅τπ⋅(1+krd); krd=(1−1.5)(4.28)
with
δi≈1Re[π2τ2+j⋅μiron⋅(σi/kti)⋅S⋅ω1]1/2(4.29)
The iron magnetization curve is accounted for Bti = μiron · Hti, by the B(H) curve on the secondary iron surface. Approximately (for low-S · Ge LIMs), the transverse edge effect coefficients (for Al and iron), ktrAL and kti, are (3.40) and (3.42):
ktrAL≈11−tanh(πτ⋅ae)(πτ⋅ae)⋅[1+tanh(πτ⋅ae)⋅tanhπτ(c−ae)]−1>1(4.30)
kti=11−tanh(πτ⋅aei)πτ⋅aei>1; i=1,2,3(4.31)
The equivalent goodness factor GeALi becomes
GeALi=μ0⋅ω1⋅τ2⋅dALπ2⋅geai⋅σeAli(4.32)
For reasonably small ktrAL, c = τ/π.
These expressions allow for SLIM circuit model following the same routine as for DLIM in the previous paragraph. But the secondary back-iron current density variation along penetration depth produces a leakage inductance L′2l, which may be approximated as (from eddy current theories [3])
L′2l≈R′2iS⋅ω1=R′2|S⋅ω1|⋅σi⋅δiσAL⋅dAL⋅ktrAlkti⋅kskin; |S⋅ω1|>2π×1[rad/s](4.33)
So the equivalent circuit for SLIMs has to be completed with the secondary back-iron leakage inductance (Figure 4.6).
As evident in Figure 4.6, the magnetization inductance Lm, secondary resistance R′2, and the secondary iron leakage inductance L′2l (reduced to primary) depend on the primary mmf (or on linear current sheet J1(I1)) and on slip frequency S · ω1. Moreover, the mechanical airgap g varies due to secondary (track) irregularities and on the primary on vehicle framing, light but inevitable, vibrations. To illustrate the magnitude of secondary solid iron influence on SLIM performance, let us consider the numerical results for a LIM with the data: τ = 0.084 m, 2a = 0.08 m, back-iron laminations count i = 3, number of poles 2p = 6, W1(turns per phase) = 480, mechanical gap g + hAL = 0.012 m, dAL = 0.06 m, aluminum sheet overhang width 2c = 0.12 m, σAL = 3.5 × 107 (Ω m)–1, σi = 3.55 × 106 (Ω m)–1; stator slot depth hs = 0.045 m, open slot width bs = 0.009 m, y/τ = 5/6 (chorded coils).
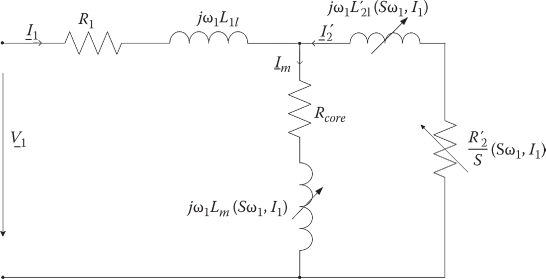
FIGURE 4.6 SLIM equivalent circuit.
The influence of iron on equivalent secondary conductivity accounts both for edge and for skin effects; this explains why σeALi/σAL < 1 and the presence of a minimum point (Figure 4.7a).

FIGURE 4.7 SLIM characteristics at standstill (a) iron magnetization curve, (b) equivalent airgap and electrical conductivity versus frequency, and (c) thrust and equivalent goodness factor versus frequency, at constant current. (After Boldea, I. and Nasar, S.A., Linear Motion Electromagnetic Systems, John Wiley, New York, 1985.)
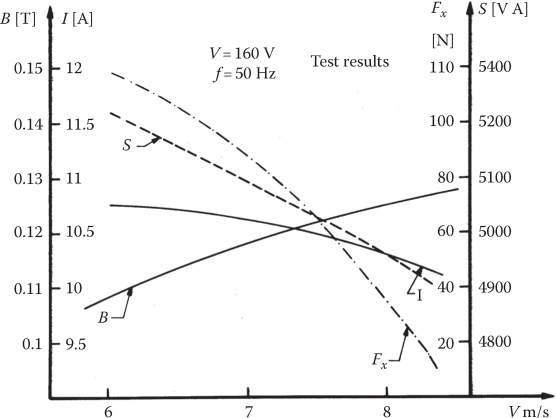
FIGURE 4.8 SLIM running test results (synchronous speed US = 2 · τ · f = 8.4 m/s). (After Boldea, I. and Nasar, S.A., Linear Motion Electromagnetic Systems, John Wiley, New York, 1985.)
A few remarks related to the results in Figures 4.7 and 4.8 are in order:
The airgap flux density of SLIMs for low-speed applications is rather low, and thus the thrust density is low, so are efficiency and power factor.
The case in point suggests to use, for same synchronous speed, a higher pole pitch τ = 2 · 0.084 = 0.168 m and 2p = 4 poles, to somehow alleviate the performance.
For short travels (a few meters), ladder secondary flat SLIM should be used for speeds below 10 m/s.
4.4 Flat SLIMs with Ladder Secondary
Low-speed flat SLIMs with ladder secondary (Figure 4.9) have been proposed (and used) for short travel (less than 3–4 m) applications (machining tables) for thrusts up to a few kN.
In such applications, the mechanical airgap may be as low as 1–2 mm. This is the whole magnetic airgap. For small airgap, at least the primary slots have to be semiclosed with openings (bs1) up to 4–6 mm, while the secondary ladder may be placed in a laminated core with slot openings bs2 of 2–3 mm. This way the Carter coefficient, due to double slotting, KC <1.3–1.4 and the airgap fringing coefficient kFg ≈ 1.
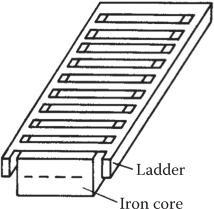
FIGURE 4.9 Ladder secondary of SLIM.
The airgap flux density at rated thrust may now be chosen as high as 0.65–0.7 T because the back iron in the secondary is laminated. The secondary ladder, made of aluminum, may be die casted in sections as for rotary IMs.
The parameters of the equivalent circuit have expressions similar to those of rotary cage rotor IMs:
R′2=2⋅a⋅(W1⋅kW1)2p⋅τ⋅dAL⋅bs2τs2⋅(σAL/kskin)⋅(1+kend); kend=Rr2⋅Rb⋅sin2(π⋅p/Ns2)(4.34)
kend accounts for end-bars resistance in the ladder of secondary:
L′2l=2⋅μ0⋅2⋅a⋅12⋅(W1⋅kw1)2Ns2⋅(λs2+λdiff2+λend2)(4.35)
Lm=6μ0π2⋅(W1⋅kw1)2⋅τ⋅2ag⋅kc⋅(1+kss); λs2≈1−2; λdiff2=0.3−0.4; λend=0.7−1.5≈0.6(lec2a)(4.36)
where
Ns2 is the number of secondary slots per primary length
λs2, λdiff2, λend2 are the geometric specific (nondimensional) permeances for secondary leakage field.
kss is the total (primary and secondary) core magnetic saturation coefficient (kss ≈ 0.3–0.6, in general)
bs2, τs2 are the secondary slot opening and slot pitch (bs2/τs2 ≈ 1/2)
Rr is the ladder end-bar section resistance
Rb is the secondary in-slot bar resistance
Let us consider a numerical example with τ = 0.1 m, 2p = 10, g = 1.5 mm, dAL = 16 mm, bs2/τs2 ≈ 1/2; kend2 = 0.3, 2a = 0.2 m, kc = 1.3, kskin = 1.25, σAL = 3.5 × 107 (Ω m)–1, kss = 0.1.
The goodness factor Ge, for Us = 4 m/s (f1 = 20 Hz) is
(Ge)20 Hz=μ0⋅ω1⋅τ2⋅(σAL/kskin)π2⋅g⋅kc⋅dAL⋅(bsτs1+kend) =1.256⋅10−6⋅2π⋅20⋅0.12⋅(3.5⋅107/1.2)⋅1.6⋅10−2⋅12π2⋅1.5⋅1.3⋅10−3⋅1.1⋅1.3=13.38
This rather high value would allow for maximum thrust (skGe = 1), the slip sk = 0.0747, to provide for a good power factor (above 0.75), besides a good efficiency (above 0.75); the rated slip may be even larger than Sk for SmtedGe = 1.3, for PWM vector control.
The ladder secondary thus seems capable of producing notable performance even for low-speed, low travel (3–4 m) and also for higher speeds (higher Ge ≤ Ge0(2p)). The value of Ge = 13.38 < 20 (the optimum goodness factor for 2p = 10). Also, even at S = 0.1, the dynamic end effect is negligible as seen in Figure 4.1.
Note: As seen here, the dynamic end effect may be present even at small speeds (see in the previous example for 2p = 4, 6) – U = Us*(1 – S) = 4*(1 – 0.1) = 3.6 m/s—if the goodness factor is high. In the earlier example, for 2p = 6, for example, it suffices to increase the airgap from 1.5 mm to 1.5* 10/6 = 2.5 mm to reduce Ge to Ge ≈ 8 and thus reduce the dynamic end effect to negligible influence, at the price of also reducing the conventional performance. In some small-speed applications, it may be thus preferable to allow for some dynamic longitudinal end effect for (2p = 4, 6) but still secure good performance due to higher Ge.
4.5 Tubular SLIM with Ladder Secondary
Tubular SLIM may be favored in short length (less than 2.5 m) travel applications due to zero net radial force between primary and secondary (for symmetric mover position in the airgap) and practically zero end connections of short-primary circular coils (Figure 4.10). Also, the stator is to be made of disk-shape laminations, with open slots (inevitably so) to cut the material and manufacturing costs; to reduce eddy current iron losses in the back iron (where the magnetic field goes perpendicular to lamination plane), thin radial slits are cut in the back-iron laminations (Figure 4.10b); the same is valid for the secondary core; the secondary ladder is made of aluminum rings or short-circuited circular-shape coils in open slots; the slot opening should not surpass 3 airgap lengths in the secondary and 4–5 airgaps in the primary, to limit Carter coefficient. This way, with an airgap of 1–1.5 mm, good results are expected in terms of performance/cost, with respect to tubular linear permanent magnet synchronous motors, which represent such a strong competition that the Al-on-iron secondary was discarded here for tubular SLIMs (Figure 4.10). Only the ladder secondary is considered.
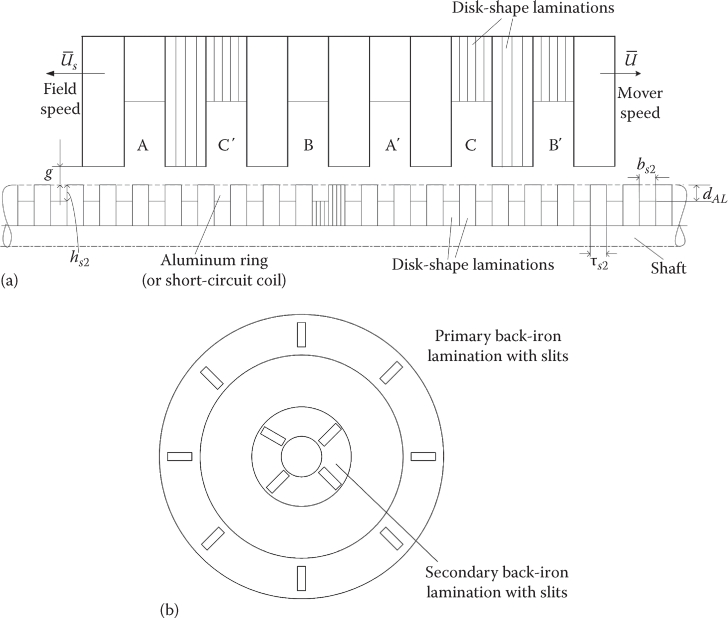
FIGURE 4.10 Tubular SLIM with ladder secondary: (a) longitudinal cross section, (b) back-iron laminations with slits.
Note: For very short travels (less than 0.4–0.5 m) and long (fix) primary with short mover secondary, to reduce the mover weight and avoid a flexible power cable, a dual airgap structure, with an aluminum cylinder with embedded Somaloy inserts (as teeth), which reduces the magnetic airgap to the mechanical dual one, is proposed. As linear PM synchronous motors represent a strong contender for such applications, this solution is not pursued here further.
The tubular SLIMs with ladder secondary parameters have expressions similar to flat SLIMs, but the primary and secondary coils are circular and only slot and differential leakage inductances exist; the stack width now becomes π · Dis (Dis, secondary outer diameter); so no secondary transverse edge effect occurs; skin effect in the secondary remains present and is treated as for rotary cage rotor IMs:
R1t=ρcoπ⋅Dav1⋅jcor⋅W21I1r⋅w1=kR1t⋅W21; X1l=2μ0⋅π⋅Dav1p⋅q⋅(λslot1+λdiff1)⋅W21=k1lt⋅W21Lm=6μ0π2⋅(W1⋅kW1)⋅τ⋅π⋅Disp⋅g⋅kcL′2l=2μ0⋅π⋅Dav2⋅12⋅(W1⋅kW1)2Ns2⋅(λs2+λdiff2)=k2lt⋅ω21R′2=ρALπ⋅Dav2⋅12⋅(W1⋅kW1)2Aring⋅Ns2=kR2t⋅W21=kLm⋅W21; Aring=bs2⋅hs2⋅kfill2(4.37)
With the given rated phase mmf W1 · I1n and rated current density jcor, all parameters of the equivalent circuit (as for flat LIMs) are proportional to the number of turns/phase squared. This peculiarity will help notably in the design process as evident in the next chapter.
Also, the reasonably small airgap (1–1.5 mm) for short travel (0.3–1.5 m), though larger than that in rotary IMs, provides for acceptable performance/cost and reliability in applications where PMs are to be avoided.
4.6 Circuit Models of High-Speed (High Goodness Factor) SLIMs
By high-speed LIMs, we mean LIMs where dynamic end effects have to be considered; as already explained in this chapter, the dynamic end effect can occur in ladder secondary LIMs of small airgap (short travels) even at low speeds (4–5 m/s), at large goodness factor (Ge > 8) values, for a small number of poles (2p = 2, 4). So we might as well use the term high goodness factor or large dynamic end effect LIMs, instead of high-speed LIMs.
Accounting for dynamic end effect in the circuit model would mean introducing its influence on the conventional circuit parameters and adding new ones.
The first attempt [4] relied on the idea that the end effect reduces the thrust and consequently reduces the emf ke times. This effect may be translated into an additional parallel term in the equivalent circuit Ze:
Z¯e=j⋅Xm⋅(R′2/s+j⋅X′2l)R′2s+j⋅(Xm+X′2l)⋅1−keke(4.38)
with
Ese≈Ems⋅(1−ke); Ems=Xm⋅Im
ke=kwe1kw1π⋅τeτ2γ22r+(πτe)2⋅f(δ)⋅e−p⋅τe|γ2r|⋅sinh(p⋅τe⋅γ2r)p⋅sinh(τe⋅γ2r); f(δ)≈γ2r⋅sinδ+πτe⋅cos δ
δ=δ0+c1⋅U; δ0≈3π4
kwe1=sin(ττe⋅π6)q1⋅sin(ττe⋅π6⋅q1)⋅sin(ττe⋅π6⋅yτ); γ2r from (4.2)
with kwe1, τe winding factor and pole pitch for the exit end wave (3.67); U is the LIM speed and c1 is [4]
C1≈1Usmax⋅tan(π⋅τeτ)U=Us max/2(4.39)
The equivalent circuit in Figure 4.11 has been checked against two LIMs one of medium speed and one of high speed, with good agreement in terms of thrust versus speed for given phase current (Figures 4.12 and 4.13) [4].
As the verifications of active, reactive powers and secondary losses agreement of equivalent circuit in Figure 4.11 with field theory results (Chapter 3) have not been performed, subsequently, starting from the same idea of emf reduction by end effect, modifications in all components of the standard circuit model have also been added (Figure 4.14) [5].
The end effect impedance Ze in Figure 4.14 [5] is the same as in Figure 4.11 [4] but, in addition, the coefficients kxe and kRe are calculated from the single dimensional field theory (see Chapter 3) by airgap reactive and active secondary power balance. The thrust and power factor agreement of this circuit with experiments on a 6 pole LIM with τ = 0.2868 m, aluminum (6 mm) on iron secondary, with 10 mm airgap, have proved very good at synchronous speeds of up to 28.68 m/s (140 kW SLIM for urban transportation).
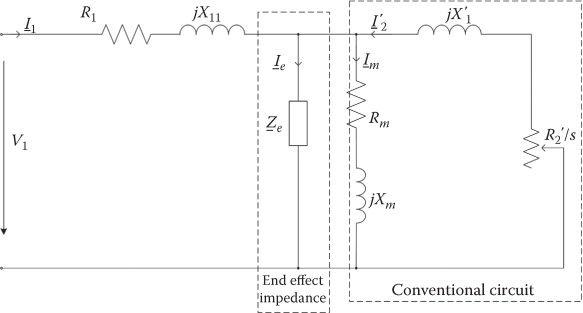
FIGURE 4.11 LIM equivalent circuit with simplified end effect impedance Ze.
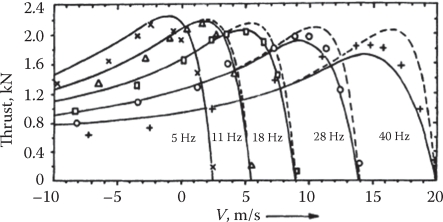
FIGURE 4.12 Thrust/speed curves for constant current: theory versus experiments—CIGGT-LIM. (After Gieras, J.F. et al., IEEE Trans., EC-2(1), 152, 1987.)
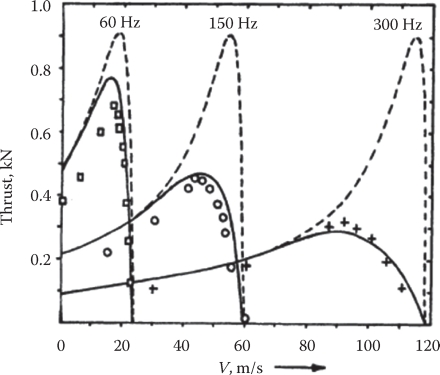
FIGURE 4.13 Thrust/speed curves for constant current: GEC–LIM. (After Gieras, J.F. et al., IEEE Trans., EC-2(1), 152, 1987.)
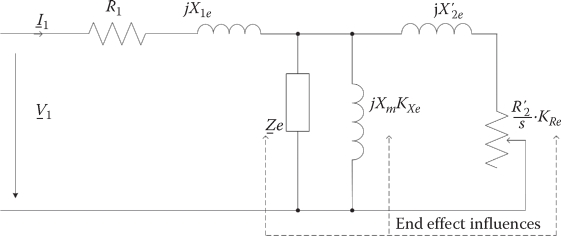
FIGURE 4.14 More complete equivalent circuit of LIM with end effect. (After Cabral, C.M.A.R., Analysis of LIMs using new longitudinal end effect factors, Record of LDIA-2003, Birmingham, U.K., pp. 291–294, 2003.)
An experimentally based method that measures the LIM equivalent impedance at a few representative speeds, slip frequencies, and primary currents may also be used to identify the equivalent circuit curve fitting, to estimate the equivalent circuit parameters.
Both constant current and constant voltage (with variable frequency) tests may be performed for the scope.
The equivalent circuit models so far have integrated rather well all end effect influences, but at the price of variable parameters (with speed and current); in essence, only Lm and R′2 vary with speed and current; and an additional end effect impedance (resistance, even) Ze(ke) is added; ke is variable with speed. Even linear variations (Lm and R′2 increase with speed) would suffice at a first approximation to be used in circuit models for transients and control.
4.7 Low-Speed Lim Transients and Control
The circuit models of low-speed LIMs, which are in general single sided, with aluminum-iron secondary for longer travel (above 3–4 m), have parameters variable with slip frequency (due to skin and/or edge effects) and magnetization current Im (or primary current) due to magnetic saturation.
In short, the LIM is like a rotary equivalent induction machine with variable parameters. Magnetic saturation or airgap influence on magnetization inductance may be (and is) handled by Lm(Im) to investigate transients by the d–q model, which may be used for low-speed (low end effect) LIMs, with small adaptations.
Moreover, the secondary resistance variations with slip frequency may be small as the slip frequency is controlled in inverter-fed (all) LIM drives.
But the presence of solid back iron behind the aluminum sheet of LIM secondary leads to a variation of R′2 with Im also: this is unknown in regular cage rotor rotary IMs (but known to solid rotor high-speed rotary IMs).
Let us consider R′2 (Im) only in such SLIMs.
Now it becomes evident that we may use the d–q model for low-speed LIM transients and control.
4.7.1 Space–Phasor (DQ) Model
The rotary IM space–phasor model can be adapted rather easily for low-speed LIMs; in general coordinates,
ˉV1=R1⋅ˉi1+dˉψ1dt+jωbˉλ1; ˉV1=Vd+jVq; ˉi1=jiq; ωb=ω1 V′2=0=R′2⋅ˉi′2+dˉψ′2dt+j⋅(ωb−ωr)⋅ˉψ′2; i′2=iD+jiQFx=−32⋅πτ⋅(ˉψ1ˉi*1); ˉψ1=L1⋅i1+Lm⋅i′2; ˉψ′2=L′2⋅i′2+Lm⋅i1L1=L1l+Lm; L′2=L′2l+Lm; im=i1+i′2; ω1=Us⋅πτ(4.40)
Fna≈32⋅Lm⋅i2mge; θ = ∫ω1dt=−∫(S⋅ω1+ωr)dt(4.41)
A few remarks are in order:
The equations are similar to those of single-cage rotary IMs (in the absence of end effects).
The thrust, Fx, equation has the sign (–) because the primary is the mover.
ωb is the speed of the reference system ωb = ω1 for synchronous coordinates.
The sign (–) in the reference system angle θb is due to the fact that the primary is the mover.
The normal attraction force (total normal force for cage secondary LIM) Fna is obtained here as the derivative of magnetic energy in the airgap with respect to airgap ge.
Apparently, the number of pole pairs p does not occur in thrust Fx, but, in fact, it is involved implicitly by the flux ˉΨ1 expression. The space–phasor diagrams for steady state (d/dt = 0) in synchronous coordinates (ωb = ω1) are shown in Figure 4.15 for motoring and generating (regenerative braking).
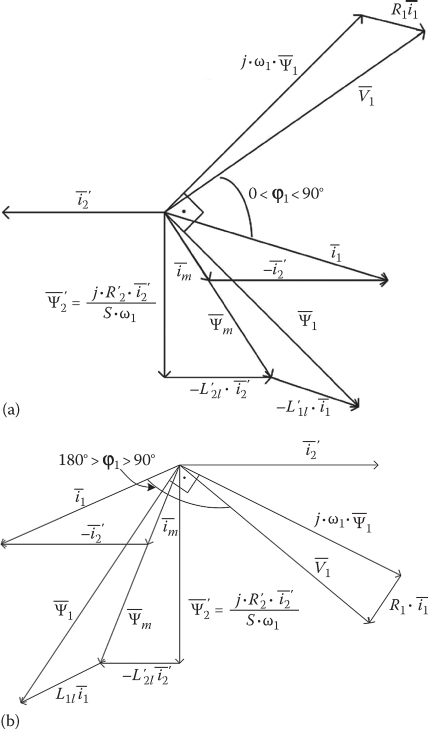
FIGURE 4.15 The space–phasor diagram of low-speed LIMs for steady state: (a) motoring, (b) generating.
The investigation of transients may be approached directly by Equation 4.40, say, in synchronous coordinates ωb = ω1 with the d/dt replaced by s (Laplace operator):
V1(s)=R1⋅i1(s)+s⋅Ψ1(s)+j⋅ω1⋅Ψ1(s)0=R′2⋅i′2(s)+s⋅Ψ′2(s)+j⋅ω1⋅Ψ′2(s)(4.42)
Apparently, we do have four variables and two equations, but the flux/current relationships reduce the number of complex variables to two. To include the wound secondary case V′2 ≠ 0 in (4.40) and for more generality we adopt this case.
Three types of controls seem practical:
I1 – f1 (scalar control)
Secondary (“rotor”) vector control (ˉΨ′2,ˉi1): FOC
Direct thrust and flux control (Fx, Ψ1): DTFC
The earlier control methods introduce constraints and thus reduce the order of the system (4.41), which still needs the motion equations:
msU=mdUdt=Fx−Fload; s⋅θb=dθbdt=−S⋅ω1−Uτ⋅π(4.43)
Also, the primary voltage vector ˉV is
ˉV1=23⋅(Va+Vb⋅ej2π3+Vc⋅e−j2π3)⋅e−jθb(4.44)
For constant speed (U = ct) transients equations (4.41) suffice and, after eliminating the currents ˉi and ˉi′, we are left with two equations with primary and secondary flux vectors as variables [6]:
τ′s⋅s⋅Ψ1+(1+j⋅ω1⋅τ′s)⋅Ψ1=τ′s⋅V1+kr⋅Ψ′2; τs=L1R1τ′r⋅s⋅Ψ′2+(1+j⋅s⋅ω1⋅τ′r)⋅Ψ′2=τ′r⋅V′2+ks⋅Ψ1; τr=L′2R′2ks=LmL1; kr=LmL′2;τ′s=τs⋅σ; τ′r=τr=τr⋅σ; σ=1−L2mL′2×L1(4.45)
It is now evident that the eigen values of the system (4.45) are obtained by solving the characteristic equation:
1+(s+j⋅ω1)⋅τ′s−kr−ks1+(s+j⋅S⋅ω1)⋅τ′r|=0(4.46)
It may be proved that the real part of γ1,2 eigen values is negative, for the stable part of the mechanical curve Fx(U), for given V1 and V′2 = 0 as known from the critical slip frequency of rotary IMs:
(S⋅ω1)k≈R′2L1l+L′2l(4.47)
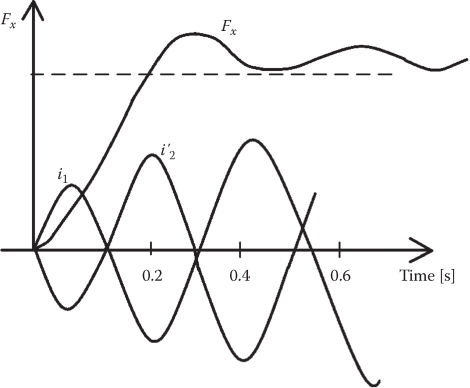
FIGURE 4.16 Typical sudden ac symmetrical input at standstill, from zero current.
In essence, however, there are two complex eigen values and two rather fast time constants for LIM transients τ′s and τ′r; one inflicted by the primary (τ′s) and the other by the secondary (τ′r). As the solutions of (4.46) are analytical, the LIM transients at constant speed are straightforward. Also, as the LIM mover mass is rather large, the mechanical transients are notably slower than electromagnetic transients, so that they can be solved separately by inserting the flux and current instantaneous values in the thrust expression present in the motion equation.
A typical qualitative response, at standstill, with sudden sinusoidal voltages (of given frequency) application and zero initial current, is shown in Figure 4.16.
The sum of two currents i1 + i′2 is the magnetization current im, and the thrust builds up after some time because it takes time to install the magnetic flux in the machine, to interact with current for thrust production.
Much faster thrust response is obtained with the flux already installed in the machine, even if a single voltage vector is preapplied to produce a dc field (with fixed position) in the LIM, before starting.
4.8 Control of Low-Speed LIMs
As already stated in this chapter, scalar (SC), vector (FOC), and direct torque and flux control (DTFC) seem [6] the most practical solutions.
Let us start with scalar I1 - Sf1 close-loop control.
4.8.1 Scalar I1 – Sf1 Close-Loop Control
As shown in the circuit model of LIMs, the thrust is
Fx=3⋅I21⋅R′22⋅τ⋅f1⋅S⋅(1+(1S⋅Ge)2);Ge≈ω1⋅LmR′2(4.48)
with current and slip frequency as controlled variables, a simple control strategy may be developed with and without a speed control loop.
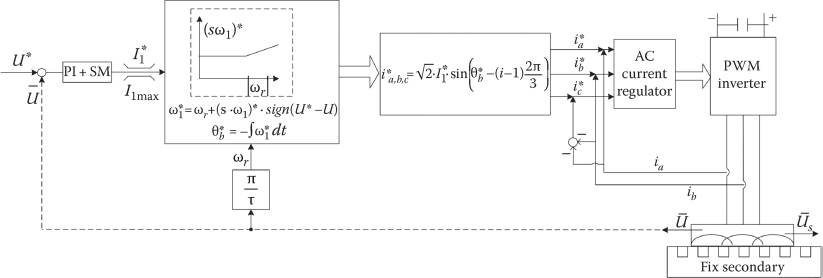
FIGURE 4.17 I–f close-loop control of LIMs.
The maximum thrust/current is obtained for
(S⋅ω1)k=R′2Lm(4.49)
The slip frequency may be kept constant, up to base speed obtained at full voltage, for sustained full load and then increased a little for flux weakening.
Increasing S · ω1 over (S · ω1)k means reducing the efficiency, but still allowing higher speed/thrust envelope.
A generic block diagram is shown in Figure 4.17.
A few notes on Figure 4.17 are in order:
Motoring and regenerative braking may be provided and the slip frequency is feed forwarded.
The speed controller (illustrated here by a PI plus sliding mode implementation—for robustness) outputs the stator phase current RMS value which is limited, for protection.
With measured LIM speed, the primary frequency ω∗1 is feed forwarded via the current angle θ∗b for the three reference currents i∗a, i∗b, i∗c.
AC current regulators (individual or current vector error or predictive regulators) are used to control the PWM inverter.
An outer position close loop may be added if position control action is targeted.
Though called scalar control, the scheme in Figure 4.17 is almost equivalent with indirect current vector control (used for rotary IMs).
As the parameters (Lm, R2) may vary with current I1 and slip frequency, Sω1, the control is not fully robust, but the PI + SM speed regulator compensates for this drawback notably, despite the apparent simplicity of the control scheme.
4.8.2 Vector Control of Low-Speed LIMs
Vector control means independent flux and thrust control in LIMs. It may be primary flux ˉΨ1, airgap flux ˉΨm, or secondary flux ˉΨ′2. The implementation of vector control (FOC) relates to separate control of the primary-flux current iM and thrust current iT components in synchronous coordinates (ωb = ω1; dc in steady state).
While FOC can be performed for all the defined fluxes, only with constant secondary flux Ψ′2 amplitude the thrust/speed curves are linear; that is ideal for control purposes (as in dc brush PM motors!). So, returning to the space–phasor model (4.32 through 4.42), we may eliminate secondary current I′2 and primary flux ˉΨ1 to obtain
ˉV1(R1+(S+j⋅ω1)⋅LSC)⋅ˉi1+(s+j⋅ω1)⋅LmL′2⋅Ψ′2(4.50)
If the secondary flux is kept constant, in synchronous coordinates, it means s Ψ′2 = 0 in the two equations mentioned previously.
So the system becomes a first-order one:
0=R′2⋅i′2(s)+j⋅S⋅ω1⋅Ψ′2(s)ˉV1=(R1+(s+j⋅ω1)⋅Lsc)⋅ˉi1+j⋅ω1⋅LmL′2⋅ˉΨ′2ˉis=¯Ψ′2Lm+j⋅S⋅ω1¯Ψ′2Lm⋅L′2R′2=iM+j⋅tTiM=¯Ψ′2Lm; iT=iM⋅S⋅ω1⋅L′2R′2(4.51)
Also,
ˉΨ1=L1⋅iM+j⋅Lsc⋅iT(4.52)
Finally, the thrust is simply
Fx=−32⋅πτ⋅Imag(ˉΨ1*ˉi1)=−32⋅πτ⋅(L1−Lsc)⋅IM⋅IT(4.53)
where
Lsc=L1−L2mL′2(4.54)
With (4.51), Fx becomes
Fx=−32⋅πτ⋅(L1−Lsc)⋅(ˉΨ′2Lm)2⋅L′2R′2⋅S⋅ω1=−32⋅πτ⋅(Ψ′2)R′2⋅(ω1−ωr)(4.55)
Equation 4.55 suggests a straight-line Fx(U) curve for constant secondary flux amplitude Ψ′2. By varying the frequency at constant Ψ′2, a family of Fx(U) straight lines are obtained (Figure 4.18).
Now the voltage vector components under steady state are
VM=R1⋅IM−ω1⋅Lsc⋅ITVT=R1⋅IT+ω1⋅L1⋅IM(4.56)
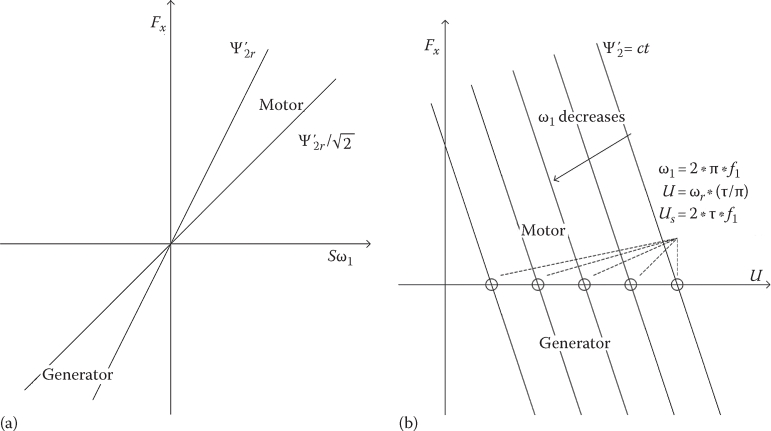
FIGURE 4.18 Mechanical characteristics at constant secondary flux Ψ′2: (a) Fx(Sω1), (b) Fx(U).
Example 4.1
Let us consider a SLIM with the data: R1 = 1 ω, R2 = 2 ω, Ψ′2 = 1 w b, Lm = 0.1 H, L1l = 0.03 H, L′21 = 0 01H, τ = 0, 1 m, which works at f2 = S · f1 = 4 Hz, at a primary frequency of 40 Hz.
Calculate:
The speed
IM, IT, and thrust
VM, VT, V1 (RMS per phase), I1 (RMS per phase), the efficiency and power factor (η1, cos φ1)
Solution
The synchronous speed Us = 2 · τ · f1 = 2 · 0.1 · 40 = 8 m/s, while the LIM speed U = 2 · τ · (f1 – f2) = 2 · 0.1 · (40 – 4) = 7.2 m/s.
From (4.51),IM=ˉΨ′2Lm=10.1=10A, IT=iM⋅L′2R′2⋅S⋅ω1=10⋅0.112⋅2⋅π⋅4=13.81 A(L′2=Lm+L′2I=0.1+0.1=0.11H)
The short circuit inductance Lsc (4.54) is Lsc = L1 – L2m/L′2 = 0.13 – 0.12/0.11 = 0.0391H. So the thrust (4.53) is
Fx=−32⋅πτ⋅(L1−Lsc)⋅IM⋅IT=−π0.1⋅32⋅(0.13−0.0391)⋅10⋅13.816=−591.5 N
VM and VT from (4.56) are
VM=1⋅10−2⋅π⋅40⋅0.0394⋅13.816=−126 VVT=1⋅13.816+2⋅π⋅40⋅0.13⋅10=340.37 V
V1=√V2M+V2T2=256 V (RM S perphase)I1=√I2M+I2T2=12.06 A (RM S perphase)
The η1 cos φ1 (with zero core losses and mechanical losses) is
η1cosφ1=FX⋅U3⋅V1⋅I1=591.5×7.23×256×12.06=0.4598
And efficiency η1:
η1=Fx⋅UFx⋅U+3⋅R′2⋅I′22+3⋅R1⋅I21I′2√2=−Lm⋅ITL′2(ˉΨ′2T=0) and thus I′2=0.10.11⋅13.816√2=8.907 A (RM S/phase).
So
η1=591.5⋅7.2591.5⋅7.2+3⋅2⋅8.9072+3⋅1⋅13.8162=0.8
Finally, the power factor cos φ1 = 0.4598/0.8 = 0.573.
Note: The results show acceptable efficiency but rather low power factor; only with a cage secondary and rather small airgap (1–1.5 mm), power factor values above 0.7 can be hoped for.
As for a vector control (FOC), there are quite a few options; we will illustrate an indirect combined current and voltage vector control as it is rather robust, except for very low speeds (Figure 4.19). For another FOC of LIMs, see Ref. [7].
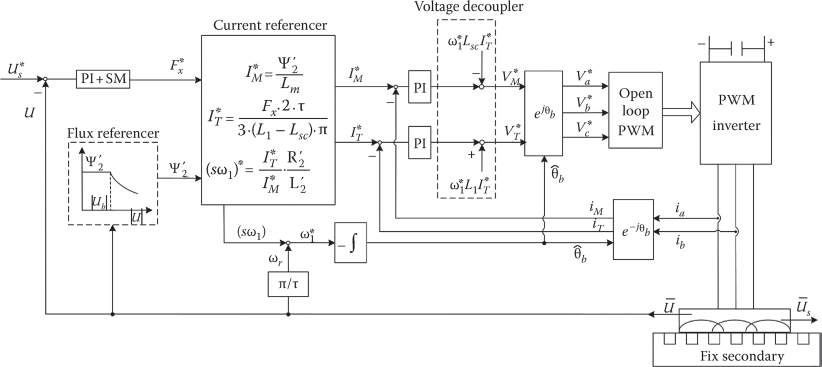
FIGURE 4.19 Field-oriented LIM control.
The control block in Figure 4.19 is characterized by
A secondary-flux referencer where the secondary-flux amplitude stays constant up to base speed, and then, for flux weakening, it decreases with speed
A current referencer that calculates online flux and thrust current components iM and iT in synchronous coordinates
A slip frequency (Sω1) and rotation angle θ*b online calculator
PI dc current controllers
A voltage decoupler
An open-loop PWM method that “copies” the sinusoidal symmetric reference voltages V*a, V*b, V*c in the inverter
4.8.3 Sensorless Direct Thrust and Flux Control of Low-Speed LIMs
In an attempt to condense the presentation of an implemented sensorless direct thrust and flux control (DTFC) system for low-speed LIMs, a motion-sensorless solution is presented [7].
DTFC is in fact the equivalent of a direct primary-flux-oriented combined vector current and voltage control system. As primary-flux orientation control is targeted, the Fx(U) curves are not any more straight lines, but they show up for voltage-source supply, those known maximums (for motoring and generating). To secure stability, the slip frequency has to be limited:
(S⋅ω1)Ψs≤R′2Lsc(4.57)
In DTFC, the primary-flux amplitude and thrust errors (ΔΨ1, ΔFx), corroborated with the position of the primary-flux vector in one of the six 60° wide sectors, starting with the magnetic axis of phase A, lead to a planned combination of neighboring nonzero and zero voltage vectors in the inverter. In effect, we provoke a primary-flux vector accelerating or decelerating (for motoring and generating) and the adjustment of flux amplitude.
So there should be two internal closed loops, one for primary flux and one for thrust, besides the speed control loop that outputs the reference thrust F*x.
The primary-flux amplitude may be constant up to base speed and then decrease with speed to allow additional speed range for maximum inverter voltage Vmax.
DTFC presupposes, then, a primary-flux observer and a thrust estimator.
Speed sensorless control requires a speed observer additionally.
A primary-flux observer based on the primary voltage model is represented by the equation
d⌢Ψ1dt=−R1⋅ˉi1+ˉV1+(kp+ki/S)⋅sgn(ˉi1−⌢i1)(4.58)
⌢i is the estimated stator current vector; for its estimation, we first need an estimation of secondary flux:
d⌢Ψ2rdt+R′2L1l⋅L1Lm⋅⌢Ψ′2r=R′2L1l⋅⌢Ψ1r+k2⋅sgn(i1−⌢i1)(4.59)
In (4.59) for simplification L′2l = 0, which is a realistic assumption.
The secondary flux in primary coordinates ⌢Ψ′2 is
ˆΨ′2=⌢Ψ1−L1l⋅ˉi1; ⌢θΨ2=tan−1⌢Ψ2β/⌢Ψ2α(4.60)
θΨ2 is the estimated position of the secondary flux with respect to primary. The adopted sliding mode functional SS=sgn(i1−⌢i1).
To reduce the chattering, the sgn function is replaced by sat(x):
sat(x)={sgn(x),for |x|>hx/h,for |x|≤h(4.61)
The block diagram for the primary- and secondary-flux observers based on these equations is shown in Figure 4.20.
The thrust estimation is
⌢Fx=−πτ⋅32⋅Imag(⌢Ψ1*i1)=πτ⋅32⋅⌢Ψ′2*⌢i′2(4.62)
From (4.62), the secondary current is estimated:
|⌢i′2|=|Imag(⌢Ψ1*i1)||⌢Ψ′2|(4.63)
Equation 4.63 is strictly valid for constant secondary flux.
Thus, with ⌢ˉΨ′2 and ⌢i estimated, we may even estimate the magnetization inductance ⌢Lm:
⌢Lm=|⌢Ψ′2||⌢Im|; Im≈√|i21|−|i22|(4.64)
The secondary resistance estimation may also be accomplished:
⌢R′2=R′2+⌢ΔR′2=R′2+kR2⋅Imag[⌢ˉΨ′2⋅(ˉi1−⌢ˉi1)](4.65)
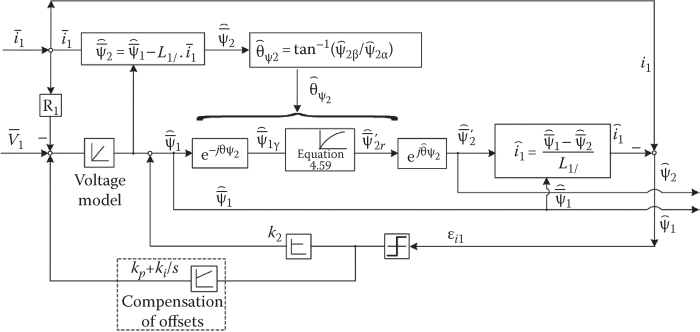
FIGURE 4.20 Observers for primary and secondary flux linkages ⌢Ψ1, ⌢Ψ′2 of LIMs.
Approximately, the secondary and primary resistance variations are proportional to each other as long as the LIM is loaded:
⌢ΔR1=kR⋅⌢ΔR′2(4.66)
What still remains is to estimate on line the LIM speed ⌢U:
⌢U≈πτ⋅(⌢ωΨ′2−(S⋅⌢ω1)); ⌢ωΨ2=d⌢θΨ2dt(4.67)
S⋅⌢ω1=23⋅τπ⋅⌢Fx⋅⌢R′2|⌢Ψ′2|2(4.68)
The emf compensation (voltage decoupling) is applied after the primary flux and thrust PI plus sliding mode close loops:
V*1d=(kpΨ+kIΨ⋅1s)⋅sgn(SΨs)V*1q=(kpF+kIF⋅1s)⋅sgn(SFx)+⌢ωΨ1⋅⌢Ψ1SΨs=εΨ+cΨ⋅dωΨdtSFx=εFx+cFx⋅dεFxdt(4.69)
The block diagram of the whole control system is shown in Figure 4.21.
For a SLIM with the data in Tables 4.1 through 4.3, sample test results are shown in Figure 4.22: the stator current ia, ib, the primary flux, and the fast response of thrust [8].
The fast response of thrust, with sensorless control, in Figure 4.22, suggests robust state observers. At the same time, the notable thrust pulsations may be partly due to the asymmetry of stator currents (Figure 4.22), associated to static end effect caused by the small number of poles (2p = 4), via the backward primary mmf wave interaction with the secondary (as in rotary IMs with asymmetric stator currents due to the asymmetric input voltages).
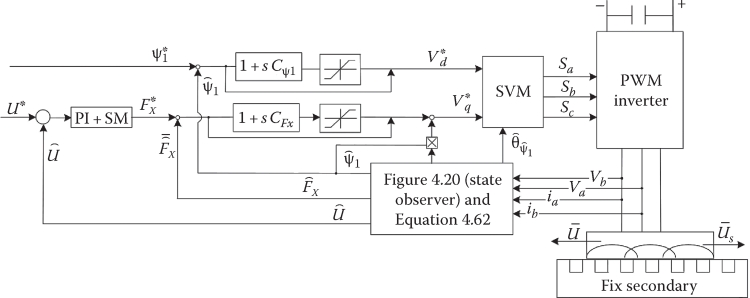
FIGURE 4.21 DTFC sensorless control of LIM.
TABLE 4.1
Motor Parameter
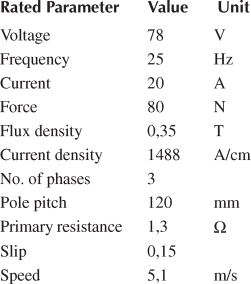
TABLE 4.2
Control Parameters
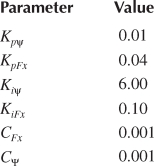
TABLE 4.3
Observer Parameters
Parameter |
Value |
Kp |
40 + j0.10 |
KI |
0.005 + j0.001 |
K2 |
–20 + j0.10 |
4.9 High-Speed Lim Transients and Control
An exhaustive solution for high-speed LIM transients would imply using the 3D-FE coupled field/circuit method. While such an enterprise can be profitable in special situations (though it requires prohibitive computation time), it is not for extensive studies or for the design of the control system.
For such purposes, we may start from the equivalent circuit in Figure 4.14, where Lm decreases, R′2 increases with speed, and an additional resistance Re is added, all these in relation to the dynamic end effect [9].
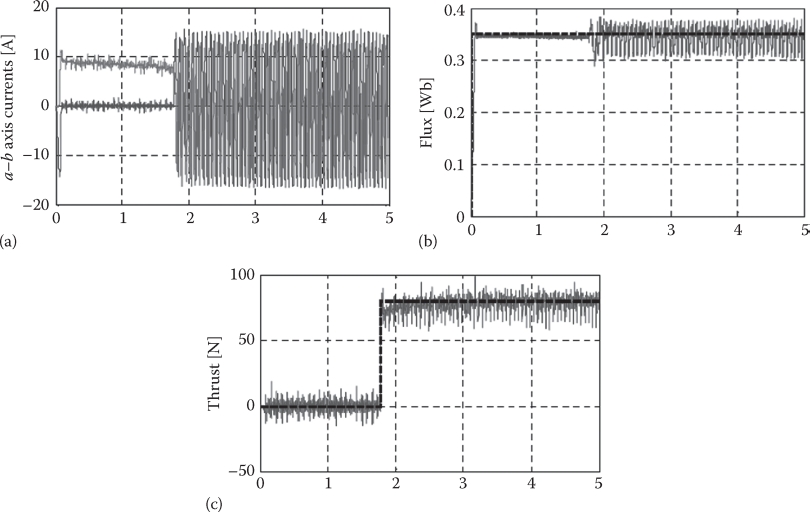
FIGURE 4.22 (a) Stator currents ia, ib, (b) primary flux, and (c) thrust. (After Cancelliere, P. et al., Sliding mode speed sensorless control of LIM drives, Record of LDIA-2003, Birmingham, U.K., 2003.)
Lm=Lm0⋅gg0⋅(1−ke(u))R′2≈R′20=constL′2l=L′2l0=constRe≈1−keke⋅R′2s(4.70)
These changes may be applied by including the previously mentioned variable parameters and the paralleled resistance Re by additional equations, which have to reflect the thrust reduction due to end effect:
ˉV1=R1⋅ˉi1+s⋅ˉΨ10=R′2⋅ˉi′2+s⋅ˉΨ′2+j⋅τ⋅Uπ⋅ˉΨ′20=Re⋅ie−s⋅ˉΨm;⌢Fx=32⋅πτ⋅Imag[(ˉΨ1*i1)−(Ψm*ie)]ˉΨ1=L1l⋅ˉi1+Lm⋅(1−ke)⋅ˉim(4.71)
ˉΨ′2=L′2l⋅i′2+Lm⋅(1−ke)⋅ˉimˉΨm=Lm⋅(1−ke)⋅ˉimˉie+ˉim=ˉi1+ˉi′2
The last term in the thrust Fx expression relates to thrust reduction due to end effect, characteristic only to small slip frequency operation, a practical constraint met in PWM inverter supplied variable-speed LIMs.
An approximative function of speed, stator current, and slip frequency may be used to calculate ke; as a first approximation, a linear increase of ke with speed may be adopted in the presence of a robust DTFC or vector control system.
4.10 DTFC of High-Speed LIMs
In a simplified DTFC application, we need only a state observer to yield ⌢Ψ1 and ⌢Fx, in the presence of a vehicle speed sensor.
Using the voltage model in primary coordinates,
⌢Ψ1=∫(ˉV*1−R1⋅ˉi1)dt≈Te1+sTe⋅(ˉV*1−R1⋅ˉi1)(4.72)
where V1* is the reference voltage vector; the low-pass filter deals with the offsets, but still, this simple and fast estimator is not suitable for low speeds (low-frequency ω1, when an I–f starting strategy may be used). To calculate the thrust, ⌢ˉΨm and ⌢ˉie (end effect current) have to be estimated.
From (4.72),
⌢ˉΨm=⌢ˉΨ1−L1l⋅ˉi1(4.73)
⌢ˉie=R′2⋅(ˉis−⌢Ψm/Lm)−j⋅τπ⋅U⋅ˉΨmR′2+Re; Re≈1−keke⋅R′2s(4.74)
Also,
⌢Fx=−32⋅πτ⋅Imag[(⌢ˉΨ1*ˉi1)−⌢ˉΨm*⌢ˉie](4.75)
For thrust and primary-flux control, a block diagram as in Figure 4.23 [9] is thus obtained.
The end effect factor ke, which increases with speed and depends also on Sω1 and, for SLIMs, on Al-on-iron secondary, also on primary current, may be calculated by 1D analytical or 2(3)D FEM field theories of LIMs.
A linear variation of ke with speed would be a first approximation.
Simulation results on an urban LIM with the data in Table 4.4 are given in Figure 4.24 [10].
Step increase of ke in Figure 4.24d is due to the decrease in slip frequency when the thrust reference is reduced. In addition, Figure 4.24f reflects the necessity to consider Re, as the estimated thrust is smaller than the actual thrust. Other pertinent LIM control systems are introduced in Refs. [10–14]].
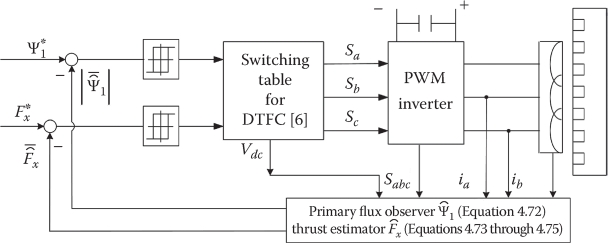
FIGURE 4.23 DTFC of high-speed LIM.
TABLE 4.4
Urban LIM Data
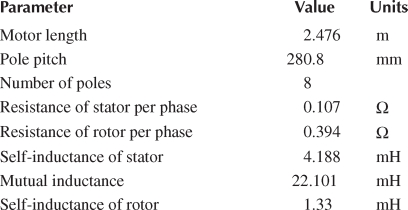
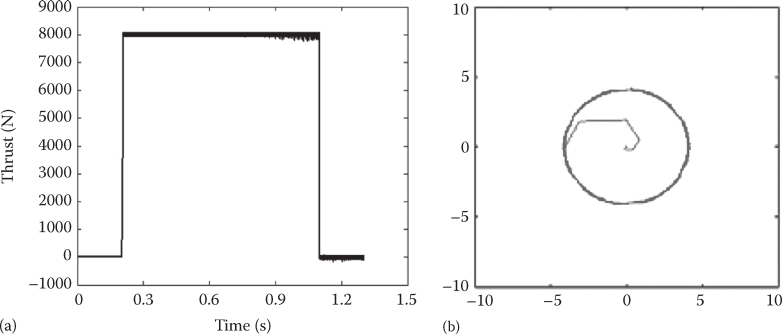
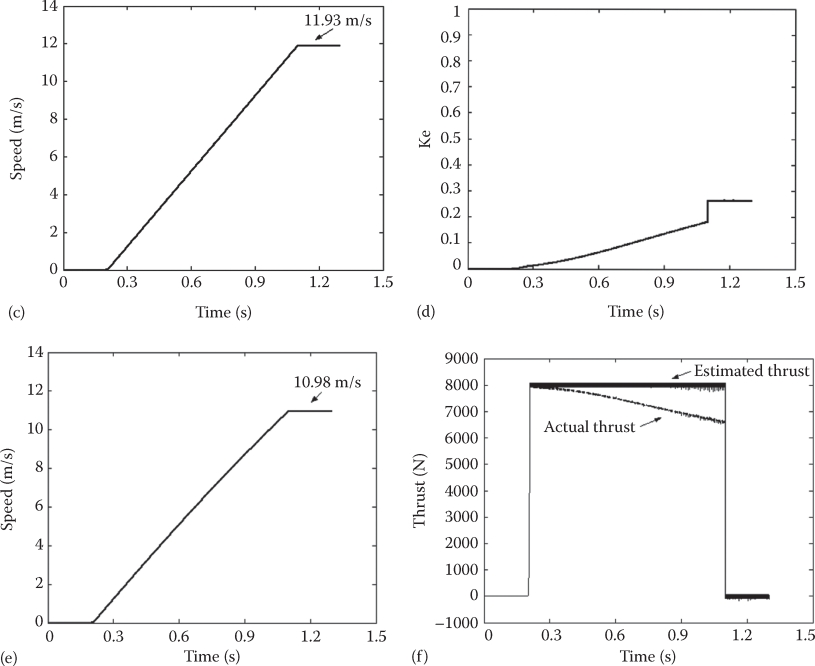
FIGURE 4.24 Urban SLIM thrust control response: (a) thrust response and (b) primary-flux response. Urban SLIM thrust control response: (c) speed response, (d) end effect factor ke, (e) actual speed response with end effect, and (f) estimated thrust and actual thrust with Re neglected. (After Wang, K. et al., Direct thrust control of LIM considering end effects, Record of LDIA-2007, 2007; Takahashi, I. and Ide, Y., IEEE Trans., IA-29(1), 161, 1993.)
4.11 Summary
Circuit models for LIMs needed to investigate transients and control and design stem from the equivalent circuit of rotary IM, with adequate modifications.
To simplify the control of low-speed (or short travel) LIMs, they are kept in the negligible dynamic end effect conditions.
The divide between low or high speed (low or notable dynamic end effect) is settled in this chapter by the condition that the exit end effect wave depth of penetration within LIM primary from the entry end is less than 10% of primary length. It turns out that this condition depends only on the number of poles 2p, equivalent goodness factor Ge, and slip S. The equivalent goodness factor included edge effect, skin effect, slot opening, airgap fringing, and magnetic saturation (for SLIMs with Al-on-iron secondary)
The low-speed LIM equivalent circuit parameters are then calculated for
Flat DLIM
Flat SLIM with Al-on-iron secondary
Flat SLIM with ladder secondary
Tubular SLIM with cage secondary
The parameters of the equivalent circuit, mainly Lm, R′2, L′2l (for Al-on-iron secondary), depend on slip frequency Sω1, airgap variation (Lm), and on the stator mmf (current)—due to magnetic saturation.
Equivalent (fictitious) double cage (ladder) may represent such variations based on frequency response tests applied to curve fitting of field theory results:
For constant stator current, a maximum thrust/current slip frequency is obtained (Sω1)k; this is notably lower than the one for which the net normal force (in SLIM) passes through zero (an idea used for some LIM-propulsed urban MAGLEVs); consequently, lower efficiency is expected for zero net normal force.
In flat SLIMs with Al-on-iron secondary, the contribution of the solid back iron of secondary (even if divided transversally into three slabs (“laminations”)) to total thrust and to the equivalent airgap is notable. Running such LIMs at constant slip frequency Sω1 would render the parameters variable only with stator current (due to magnetic saturation) and thus easier to use in assessing thoroughly the steady-state performance of LIM.
To limit the influence of transverse edge effect on secondary resistance, the overhangs of aluminum (or end slabs in ladder secondaries) should not be shorter than τ/π (c – a ≈ τ/π).
The flat SLIM with ladder secondary, for short travel (when its cost is acceptable), is shown capable, with good performance and thrust density (η ≥ 0.8, cos ϕ > 0.65) (Bg1 ≈ 0.6–0.7 T) for airgaps of 1.0–2.0 mm at maximum speeds below 10 m/s.
As the normal force in SLIM is unilateral, and large for ladder secondary, it may be used for mover (vehicle) suspension (partial or total).
The tubular LIM with cage secondary, adequate for very short travel (less than 1.5–2 m in general) and airgap of 1–1.5 mm, is credited with even better thrust density, efficiency, and power factor, due to the absence of radial force and stator end coils and edge effect, despite lower speeds (less than 6 m/s maximum speed).
Circuit models for high speed introduce a reduction by (1 – ke) of emf and then a new end effect impedance Ze in parallel with jω1Lm: Ze = ((1 – ke)/ke)Z′2c is added.
Z′2c is the conventional airgap plus secondary part of the equivalent circuit, typical to low-speed LIMs:
The end effect factor ke increases with speed, for a given high-speed LIM geometry, but it also increases when slip frequency decreases; a linear increase of ke with speed is acceptable at given slip S.
The equivalent circuits with end effects have been verified in experiments enquiring thrust reduction and then efficiency and power factor reduction and finally for secondary Joule losses [14].
Identifying the equivalent circuit parameters with dynamic end effect, for a given LIM, may also be done by processing key running tests (at key speed and loads) by regressive methods of curve fitting.
Also, simplified analytical expressions for ke(U), derived from 1D field theories, are given and checked against two representative SLIMs.
The separate treatment of transients for low- and high-speed LIMs (low or notable dynamic end effect) by space vector models is then approached.
The similarity of low dynamic end effect (low-speed) LIM space vector models with those of rotary IMs is striking: thrust instead of torque, linear speed versus angular speed, and no number of pole pairs p but τ (pole pitch) present in the thrust expression.
Motoring and generating vector (space–phasor) diagrams are presented to illustrate that, in both operation modes, the amplitude of stator flux vector ˉΨ1 is greater than that of secondary flux ˉΨ′2|:(|ˉΨ1|>|ˉΨ′2|)|.
The equations of low-speed LIMs in space phasor for constant speed may be solved analytically and reveal two complex eigen values γ1,2; the real parts of γ1,2 are negative at less than critical slip frequencies (Sω1 < (Sω1)k); (Sω1)k corresponds to maximum thrust.
As the flux initiation in LIMs is not very fast, it is good to have it first “installed” even if as a single voltage vector (say ˉΨ1 aligned to phase a axis), before activating the speed control.
Three control techniques, one scalar (I–Sf1 close-loop control), two vectorial (one secondary-flux orientation control-FOC), and one direct thrust and primary-flux control DTFC.
The simplicity and robustness of I–Sf1 scalar control are notable, if PI plus sliding mode speed control is provided, but fast thrust transient response is not guaranteed.
FOC of LIMs reveals the linear thrust/speed, Fx(U), curves, typical for rotor flux orientation control in rotary IMs.
A combined indirect vector current and voltage control FOC is described, to secure fast thrust response and increased stability and dynamic robustness, especially if a position sensor (with speed calculation) is available for positioning applications.
To illustrate DTFC of low-speed LIMs, a motion-sensorless speed control system with space vector modulation and PI + SM primary- and secondary-flux observer and thrust and speed estimators has been introduced; corrections for secondary (and primary) resistances are introduced together with magnetization inductance Lm and Lm(Im) curve online adjustment. Lm varies not only due to magnetic saturation but also due to airgap inevitable fluctuation; this justifies its online correction. The response in thrust and flux step variation are remarkably fast and stable in experiments.
For high-speed (large end effect) LIMs’ transients and control, simplified corrections of Lm (it becomes (1 – ke) · Lm) and addition of a parallel resistive circuit Re = ((1 – ke)/ke)R′2/s are introduced in the space–phasor model equations to model dynamic end effects. The dynamic end effect factor ke (which decreases the emf and the thrust and causes additional secondary Joule losses) has to be calculated (or calibrated upon commissioning the LIM drive), but it may also be considered to increase linearly with speed increase and with slip decrease; an inferior limit for |S·f1| might keep ke just linearly varying with speed for a given LIM.
An implementation of a DTFC of an existing urban LIM shows notable end effect (ke goes up to 0.3) with a step increase for a step thrust reference reduction. Again, it is Ge, 2p and S that influence ke (end effect influence, with speed implicit by frequency f1 (in Ge) and slip, with the given pole pitch of primary winding).
Short (mover) secondary and long (fix) primary LIMs have not been investigated in this chapter, even in the form of wound secondary on board of mover with energy “induction” on the vehicle, without power collection; it will be treated shortly only in the chapter on MAGLEV, as they did not reach markets yet and are heavily in competition with PMs or dc excited long primary stator linear synchronous motors.
Proposed decades ago for oscillators, short secondary long primary LIMs have been since outperformed by PM linear synchronous resonant single-phase oscillators; this is the reason why they have not been treated here in any detail (see [3] for a field theory of short secondary long primary LIMs).
Now that we have elucidated field theories, circuit models, the transients and control of LIMs, the design of LIMs will be approached separately for low-speed (low end effect) LIMs and for high-speed (notable end effect) LIMs.
References
1. I. Boldea and S.A. Nasar, Linear Motion Electromagnetic Devices, Taylor & Francis, New York, 2001.
2. A. Krawczyk and J. Tegopoulous, Numerical Modelling of Eddy Currents, Oxford University Press, New York, 1993.
3. I. Boldea and S.A. Nasar, Linear Motion Electromagnetic Systems, John Wiley, New York, 1985 (Chapter 4).
4. J.F. Gieras, G.E. Dawson, and A.R. Eastham, A new longitudinal end factor for LIMs, IEEE Trans., EC-2(1), 1987, 152–159.
5. C.M.A.R. Cabral, Analysis of LIMs using new longitudinal end effect factors, Record of LDIA-2003, Birmingham, U.K., pp. 291–294.
6. I. Boldea and S.A. Nasar, Electric Drives, 2nd edn., CRC Press, Taylor & Francis, New York, 2006.
7. G. Bucci, S. Meo, A. Ometo, and S. Scarano, The control of LIM by a generalization of standard vector techniques, IEEE—IAS Annual Meeting Conference, Bologna, Italy, 1995.
8. P. Cancelliere, V. Delli Colli, F. Marignetti, and I. Boldea, Sliding mode speed sensorless control of LIM drives, Record of LDIA-2003, Birmingham, U.K.
9. K. Wang, L. Shi, and Y. Li, Direct thrust control of LIM considering end effects, Record of LDIA-2007.
10. I. Takahashi and Y. Ide, Decoupling thrust and attractive forces of LIM using space vector control inverter, IEEE Trans., IA-29(1), 1993, 161–167.
11. B.-I. Kwon, K.-I. Woo, and S. Kim, Finite element analysis of direct thrust—Controlled LIM, IEEE Trans., MAG-35(3), 1999, 1306–1309.
12. M. Abbasian, Adaptive input—Output control of linear induction motor considering the end effect, Record of ICEM, 2010, Rome, Italy.
13. A. Gastli, Improved field oriented control of a LIM having joints in its secondary conductors, IEEE Trans., EC-17(3), 2002, 349–355.
14. W. Xu, J. G. Zhu, Y. Zhang, Z. Li, Y. Wung, Y. Guo, and Y. Li, Equivalent circuits for single—Sided linear induction motors, IEEE Trans., IA-46(6), 2010, 2410–2423.