Time is the extension of motion.
Faster networks depend on accurate timing. As the number of bits per second increases, the time in which to look for any particular bit decreases. Getting both sides to agree on timing becomes more difficult at higher speeds. Synchronous networking is largely about distribution of accurate timing relationships.
Synchronous communications do not
depend on start and stop flags to mark the beginning and end of
meaningful data. Instead, the network constantly transmits data and
uses a separate clock signal to determine when
to examine the incoming stream to extract a bit. Distributing clock
information to network nodes is one of the major challenges for
synchronous network designers. Three major types of timing are used
on networks: asynchronous, synchronous, and plesiochronous. All three
terms derive from the Greek word kronos, meaning
time. The three differ in how they distribute timing information
through the network.
Asynchronous
systems do not share or exchange timing
information. Each network element is timed from its own free-running
clock. Analog modems are asynchronous because timing is derived from
start and stop bits in the data stream. Free-running clocks are
adequate for dial-up communications because the time slots are much
longer than on higher-speed digital networks.
Synchronous
systems distribute timing
information from an extremely accurate primary system clock. Each
network element inherits its timing from the primary clock and can
trace its lineage to the common shared clock. When AT&T operated
the U.S. telephone network, the system derived its timing from the
primary reference source (PRS), a cluster of
cesium clocks located in Hillsboro, Missouri.
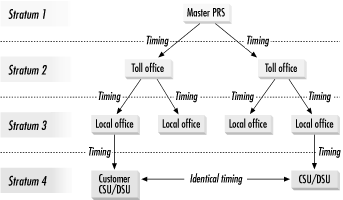
Synchronous networks may have several layers of accuracy, but the important feature is that each clock can trace timing to a single reference source. In the case of the Bell system, the primary source was labeled Stratum 1. Less-accurate devices were in higher-numbered strata. Tandem offices, also called toll offices, serviced the long-haul portions of the telephone network and were located in Stratum 2. Local switching offices were located in Stratum 3, with end-user devices such as CSU/DSUs in Stratum 4.
Figure 5-1 sketches the basic system, along with its end goal: distribution of accurate timing to peers at each stratum level. The master PRS at the top of the picture is the source of all timing goodness throughout the network. The network distributes timing information from the primary reference to the toll offices and from the toll offices to local switching offices. Customers attach to the local switching offices. Because timing information even at the lowly customer-equipment stratum is derived from the master clock, two pieces of customer equipment at the end of a T1 link between different local offices can operate within the strict timing tolerances required with 648-nanosecond bit times.
Maintaining a single network timing source is extremely expensive, and the timing distribution must be carefully engineered. Having only one timing source did not fit into the model of the post-divestiture telecommunications landscape in the U.S.
Plesiochronous
networks are networks in which the
elements are timed by separate clocks, which are very precise and
operate within narrow tolerances. Within one telco’s network,
there may be multiple “primary” (Stratum 1) clocks; each
telco maintains its own set of timing information.[11]
For this reason, the U.S.
telephone network is really a plesiochronous network. For contrast
with a synchronous network, Figure 5-2 illustrates
a plesiochronous network.
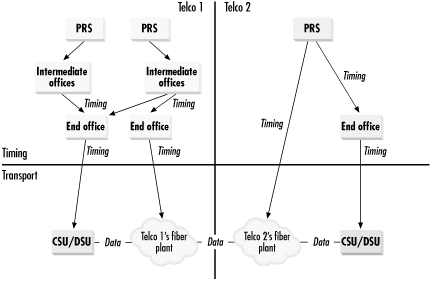
Figure 5-2 divides the network into its timing components on top and the data-transport facilities on the bottom. It also shows the facilities of two different carriers, one on the left and one on the right. A T1 transports data between the customer CSU/DSU on the left and the CSU/DSU on the right. Both telcos maintain their own primary reference sources to feed timing information to switching offices and to the devices making up the transport facilities. Even though the T1 is provided by two different carriers, precise timing tolerances allow them to cooperate in providing the T1 without needing a single shared (and trusted) source of timing information.
T-carrier systems are technically known as the plesiochronous digital hierarchy (PDH). In practice, though, the distinction between plesiochronous and synchronous is a hair-splitting one. “Synchronous” has acquired a connotation of describing any system that depends on extremely accurate timing, and the T-carrier system is occasionally referred to as the synchronous digital hierarchy (SDH). In mafsny cases, the two are combined into one acronym: PDH/SDH.
[11] Telcos may now use multiple primary reference sources for their networks. Navigational systems like the Global Positioning System (GPS) and the Long Range Navigation (LORAN) network depend on having extremely accurate timing, and it is now quite inexpensive to build specialized receivers to extract timing information from the radio signals at each office, instead of building a transnational timing network.