Addenda A
Some Concepts and Properties of Point Set Topology
A.1. Relation and Mapping
A.1.1. Relation
Definition 1.1.1
Definition 1.1.2
Assume that R is a relation from X to Y. If  , then x and y are
, then x and y are  relevant, denoted by
relevant, denoted by  .
.
Set  is called the domain of R, denoted by
is called the domain of R, denoted by  .
.
Set  is called the range of R, denoted by
is called the range of R, denoted by  .
.
For  , letting
, letting  ,
,  is called a set of images (or image) of A.
is called a set of images (or image) of A.
For  , letting
, letting  ,
,  is called the preimage of B.
is called the preimage of B.
Definition 1.1.3
For  , letting
, letting  , T is called the composition of R and S, denoted by
, T is called the composition of R and S, denoted by  .
.
For  , letting
, letting  ,
,  is called the inverse of R.
is called the inverse of R.
A.1.2. Equivalence Relation
Definition 1.2.1
Assume that R is a relation from X to X (or a relation on X) and satisfies
(1)  (Reflexivity)
(Reflexivity)
(2)  (Symmetry)
(Symmetry)
(3)  (Transitivity)
(Transitivity)
R is called an equivalence relation on X.
Assume that R is an equivalence relation on X. For  , letting
, letting  ,
,  is an equivalent set of x.
is an equivalent set of x.
Definition 1.2.2
For  , if
, if  and
and  , then
, then  is a partition of x.
is a partition of x.
Proposition 1.2.1
R is an equivalence relation on X. Then,  is a partition of X.
is a partition of X.
A.1.3. Mapping and One–One Mapping
Definition 1.3.1
F is a relation from X to Y. For , if there exists a unique  such that
such that  , then F is called a mapping from X to Y, denoted by
, then F is called a mapping from X to Y, denoted by  .
.
If  , F is called surjective, where
, F is called surjective, where  is the range of F.
is the range of F.
For  , if
, if  , F is called 1-1 mapping.
, F is called 1-1 mapping.
Proposition 1.3.1
f : is a mapping. For
is a mapping. For  , we have
, we have
![]()
![]()
![]()
If  , then
, then  .
.
For  , we have
, we have
![]()
![]()
![]()
If , then  .
.
If f is surjective, then  ,
,  .
.
If f is a 1-1 mapping, then  .
.
Where,  is the complement of A.
is the complement of A.  is the inverse of f.
is the inverse of f.
If f is surjective and 1-1 mapping, then  and
and  .
.
Definition 1.3.2
Assume that X is a Cartesian product of  . Let
. Let  . Define
. Define  .
.  is the projection of X on
is the projection of X on  , or a set of the i-th coordinates.
, or a set of the i-th coordinates.
A.1.4. Finite Set, Countable Set and Uncountable Set
Definition 1.4.1
A and B are two sets. If there exists a 1-1 surjective mapping from A to B, A and B are called equinumerous.
Any set that is not equinumerous to its proper subsets is a finite set.
A set that is equinumerous to the set N of all natural numbers is a countable set.
An infinite set that is not equinumerous to the set N of all natural numbers is an uncountable set.
Theorem 1.4.1 (Bernstein)
If A and the subset of B are equinumerous, and B and the subset of A are also equinumerous, A and B are equinumerous.
A.2. Topology Space
A.2.1. Metric Space
X is a non-empty set.  is a mapping, where R is a real set.
is a mapping, where R is a real set.  , d satisfies:
, d satisfies:
(2) 
(3) 
Then, d is a distance function on X and  is a metric space.
is a metric space.
Definition 2.1.2
Proposition 2.1.1
(1) , there is one neighborhood at least.  , have
, have  .
.
(2)  , for any two spherical neighborhoods
, for any two spherical neighborhoods  and
and  , there exists
, there exists  such that
such that  .
.
(3) If  , then there exists
, then there exists  .
.
A.2.2. Topological Space
Definition 2.2.1
X is a non-empty set.  is a family of subsets of X. If satisfies the following conditions
is a family of subsets of X. If satisfies the following conditions
(1) 
(2)  ,
, 
(3)  ,
, 
then Definition 2.2.2
For , the set of all neighborhoods of  is called a system of neighborhoods of x, denoted by
is called a system of neighborhoods of x, denoted by  .
.
A.2.3. Induced Set, Close Set and Closure
Definition 2.3.1
For  , if
, if  ,
,  , then x is called an accumulation (limit) point of A.
, then x is called an accumulation (limit) point of A.
Set  of all accumulation points of A is called an induced set of A.
of all accumulation points of A is called an induced set of A.
Proposition 2.3.1
For  , we have
, we have
(1) 
(2) 
(3) 
(4) 
Definition 2.3.2
For  , if all accumulation points of A belong to A, then A is a close set.
, if all accumulation points of A belong to A, then A is a close set.
Proposition 2.3.2
A is close  is open.
is open.
Proposition 2.3.3
Assume that  is a family of all close sets on
is a family of all close sets on  . We have
. We have
(1) 
(2) If  , then
, then  .
.
(3) If 1 , then
, then  .
.
Definition 2.3.3
For , letting  ,
,  is called a closure of A.
is called a closure of A.
Definition 2.3.4
For  , define
, define  .
.
Proposition 2.3.5
For  , we have
, we have
(1) 
(2) 
A.2.4. Interior and Boundary
Definition 2.4.1
For , letting  ,
,  is called the interior (core) of A.
is called the interior (core) of A.
Proposition 2.4.1
For , we have
(1) A is open 
(2) 
(3) 
(4) 
(5) 
(6) 
Definition 2.4.2
For , if ,  and
and  , x is called a boundary point of A. The set of all boundary points of A is called boundary of A, denoted by
, x is called a boundary point of A. The set of all boundary points of A is called boundary of A, denoted by  .
.
A.2.5. Topological Base and Subbase
Definition 2.5.1
Proposition 2.5.1
Proposition 2.5.2
Proposition 2.5.3
(1) 
(2) If  , for
, for  , there exists
, there exists  such that
such that  .
.
Then, let  be a topology of X and
be a topology of X and  be a base of .
be a base of .
Definition 2.5.2
A.2.6. Continuous Mapping and Homeomorphism
Definition 2.6.1
If ,  and
and  , have
, have  , then f is continuous at x.
, then f is continuous at x.
Proposition 2.6.1
For  , the following statements are equivalent.
, the following statements are equivalent.
(1) f is a continuous mapping
(2) If is a base of Y, then  ,
,  .
.
(4)  is a subbase of Y;
is a subbase of Y;  , have
, have  .
.
(5) , have  .
.
(6)  , have
, have  .
.
Proposition 2.6.2
For  , the following statements are equivalent.
, the following statements are equivalent.
(1) f is continuous at x.
(2) For all neighborhoods  of
of  , there exists
, there exists  such that
such that  .
.
Proposition 2.6.3
If  and
and  are continuous, then
are continuous, then  is continuous.
is continuous.
Definition 2.6.3
A.2.7. Product Space and Quotient Space
Definition 2.7.1
Similarly, we may define the concept of the largest (finest) topology.
Proposition 2.7.1
Assume that  ,
,  . There exists the smallest (coarsest) topology among topologies on X that make each
. There exists the smallest (coarsest) topology among topologies on X that make each  continuous.
continuous.
Proposition 2.7.2
Assume that , . There exists the largest (finest) topology among topologies on X that make each continuous.
Corollary 2.7.2
Assume that  . There exists the largest (finest) topology among topologies on
. There exists the largest (finest) topology among topologies on  that make
that make  continuous. The topology is called the quotient topology with respect to
continuous. The topology is called the quotient topology with respect to  and .
and .
Definition 2.7.2
For  , letting
, letting  ,
,  is called the subspace of
is called the subspace of  .
.
Definition 2.7.3
Assume that  , where
, where  indicates the product set.
indicates the product set.  is a family of topologic spaces. Let
is a family of topologic spaces. Let  be a projection. is the smallest topology among topologies on
be a projection. is the smallest topology among topologies on  that make
that make  continuous. is called the product topologic space of
continuous. is called the product topologic space of  , denoted by
, denoted by  .
.
Proposition 2.7.3
Assume that is a product topologic space of . Letting  ,
,  is a subbase of .
is a subbase of .
Proposition 2.7.4
Assume that is a product topologic space of .  is continuous
is continuous  ,
,  is continuous.
is continuous.
Proposition 2.7.5
Assume that is a product topologic space of . Then, series  on X converges to
on X converges to  , series
, series  on
on  converges to
converges to  .
.
Where, the definition of convergence is that for  , if , there exists
, if , there exists  such that when
such that when  ,
,  . Then is called to be converging to , denoted by
. Then is called to be converging to , denoted by  .
.
Definition 2.7.4
Proposition 2.7.6
Assume that  is a quotient topologic space of with respect to R. Then,
is a quotient topologic space of with respect to R. Then,  .
.
Definition 2.7.5
For , letting  ,
,  is called the quotient topology of with respect to f. We have a topologic space
is called the quotient topology of with respect to f. We have a topologic space  and is a congruence space of and f.
and is a congruence space of and f.
Proposition 2.7.7
Proposition 2.7.8
A.3. Separability Axiom
A.3.1.  ,
,  ,
,  Spaces
Spaces
Definition 3.1.1
Definition 3.1.2
Definition 3.1.3
Proposition 3.1.1
X is a space  ,
,  , where
, where  is the closure of singleton
is the closure of singleton  . It means that the closures of any two different singletons are different.
. It means that the closures of any two different singletons are different.
Proposition 3.1.2
(1) X is a space.
(2) Each singleton on X is a close set.
(3) Each finite set on X is a close set.
Proposition 3.1.3
Proposition 3.1.5
Proposition 3.1.6
3.2.  ,
,  , Regular and Normal Space
, Regular and Normal Space
Definition 3.2.1
In space ,, A is close. For  , if there exist open sets
, if there exist open sets  and
and  ,
,  , such that
, such that  , then X is called a space.
, then X is called a space.
Definition 3.2.2
In space , for , if there exist open sets and such that  , then X is called a space.
, then X is called a space.
Proposition 3.2.1
Proposition 3.2.2
Proposition 3.2.3
Proposition 3.2.4 (Tietz Theorem)
Definition 3.2.3
If is a and space, then X is called a regular space.
Definition 3.2.4
If is a and spaces, then X is called a normal space.
A.4. Countability Axiom
A.4.1. The First and Second Countability Axioms
Definition 4.1.1
If has countable base, then X is said to satisfy the second countability axiom.
Definition 4.1.2
If in , for , there exists countable local base, then X is said to satisfy the first countability axiom.
Proposition 4.1.1
Real space R satisfies the second countability axiom.
Proposition 4.1.2
If is a metric space, then X satisfies the first countability axiom.
Proposition 4.1.3
If satisfies the second countability axiom, then X satisfies the first countability axiom.
Proposition 4.1.4
Definition 4.1.3
If has property P and any sub-space of X also has the property P, property P is called having heredity.
If for  has property P and their product space
has property P and their product space  also has property P, then P is called having integrability.
also has property P, then P is called having integrability.
The relation among separation axiom, countability axiom, heredity and integrability is shown in Table 4.1.1.
Table 4.1.1
| Separable | Distance | ||||||||
| heredity | √ | √ | √ | √ | × | √ | √ | × | √ |
| integrability | √ | √ | √ | √ | × | √ | √ | √ | √(countable) |

Where, ![]() and
and ![]() are the first and second countability axioms, respectively.
are the first and second countability axioms, respectively.
√ (countable) means that the product space of the countable number of metric spaces is metrizable.
Proposition 4.1.5
For , if X is countable, then f is continuous at  , have
, have  .
.
A.4.2. Separable Space
Definition 4.2.1
If  and
and  , then D is called dense in X, or D is a dense subset of X.
, then D is called dense in X, or D is a dense subset of X.
Proposition 4.2.1
Assume that D is a dense subset in .  and
and  are two continuous mappings. Then,
are two continuous mappings. Then, 
 on D.
on D.
Definition 4.2.2
If has dense countable subsets, X is called a separable space.
Proposition 4.2.1
If satisfies  , then X is separable.
, then X is separable.
Proposition 4.2.2
If a separable metric space satisfies , then it must be  .
.
The relation among , and metric spaces is shown below.
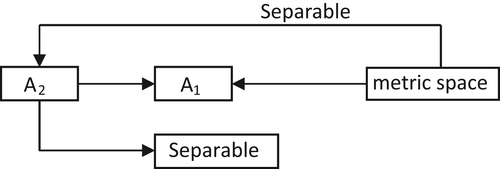
Where, A  C indicates that property A with the addition of property B infers property C.
C indicates that property A with the addition of property B infers property C.
A.4.3. Lindelof Space
Definition 4.3.1
If a family  of sets covers B and sub-family
of sets covers B and sub-family  of also covers B, then is called a sub-cover of .
of also covers B, then is called a sub-cover of .
If each set of cover is open (closed), then is called an open (closed) cover.
Definition 4.3.2
In , for any open cover of X, there exists countable sub-cover, X is called a Lindelof space.
Proposition 4.3.1
If satisfies , then X is a Lindelof space.
Corollary 4.3.1
An n-dimensional Euclidean space  is a Lindelof space.
is a Lindelof space.
Proposition 4.3.2
If is a Lindelof space, then X satisfies .
Proposition 4.3.3
If any sub-space in is a Lindelof space, then each uncountable subset A of X must have accumulation points of A.
A.5. Compactness
A.5.1. Compact Space
Definition 5.1.1
In , if each open cover of X has its finite sub-covers, then X is called a compact space.
Definition 5.1.2
Assume that is a family of sets. If each finite sub-family in has non-empty intersection, then is said to have the finite intersection property.
Proposition 5.1.1
Proposition 5.1.2
Proposition 5.1.4
If  , is compact, then their product space is compact as well.
, is compact, then their product space is compact as well.
A.5.2. Relation between Compactness and Separability Axiom
Proposition 5.2.1
A compact subset in is close.
Proposition 5.2.2
A compact space is a normal space.
Proposition 5.2.3
Proposition 5.3.4
Proposition 5.2.5
If  and is an n-dimensional Euclidean space, then A is compact
and is an n-dimensional Euclidean space, then A is compact  A is a bounded close set.
A is a bounded close set.
Proposition 5.2.6
A.5.3. Some Relations in Compactness
Definition 5.3.1
A topological space is countably compact if every countable open cover has a finite subcover.
Definition 5.3.2
A topological space is said to be limit point compact if every infinite subset has a limit point.
Definition 5.3.3
A topological space is sequentially compact if every infinite sequence has a convergent subsequence.
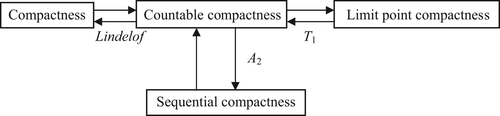
In metric space, especially in n-dimensional Euclidean space, the four concepts of compactness, limit point compactness, countable compactness, and sequential compactness are equivalent.
A.5.4. Local Compact and Paracompact
Definition 5.4.1
In , for each point on X there exists a compact neighborhood, and X is called a local compact space.
Definition 5.4.2
Assume that and  are two covers of X. If each member of is contained by some member of , then is called the refinement of .
are two covers of X. If each member of is contained by some member of , then is called the refinement of .
Definition 5.4.3
In , is a cover of subset A. If  , there exists such that
, there exists such that  only intersects with the finite number of members in , then is called a the local finite cover of A.
only intersects with the finite number of members in , then is called a the local finite cover of A.
Definition 5.4.4
In , for each open cover of on X, there exists local finite cover , where is the refinement of , then X is called a paracompact space.
Proposition 5.4.1
Each locally compact and space are normal spaces.

A.6. Connectedness
A.6.1. Connected Space
Definition 6.1.1
Assume that  . If
. If  , then
, then  and
and  are separate subsets.
are separate subsets.
Definition 6.1.2
In , if there exist non-empty separate subsets and on X such that  , then X is said to be disconnected. Non-disconnected spaces are called connected spaces.
, then X is said to be disconnected. Non-disconnected spaces are called connected spaces.
Proposition 6.1.1
In , the following conditions are equivalent.
(1) X is disconnected
(2) X can be represented by the union of two non-empty and mutually disjoint close sets, i.e., ,  , where and are non-empty close sets
, where and are non-empty close sets
(3) X can be represented by the union of two non-empty and mutually disjoint open sets.
(4) There exists non-empty both open and close proper subset on X.
Definition 6.1.3
For , if A is regarded as a sub-space of X, then it’s connected; A is called a connected subset of X.
Proposition 6.1.2
Proposition 6.1.3
Assume that Y is a connected subset on . If and are separate subsets on X, , then
, then  or
or  .
.
Proposition 6.1.4
Assume that is a connected subset. Let  . Then, B is a connected subset, especially
. Then, B is a connected subset, especially  is connected.
is connected.
Proposition 6.1.6
Proposition 6.1.7
If  are connected spaces, then their product space
are connected spaces, then their product space  is also connected.
is also connected.
From  is connected, is connected.
is connected, is connected.
Proposition 6.1.8
If  is continuous, X is connected, and there exist
is continuous, X is connected, and there exist  such that
such that  , then for
, then for  , there must have
, there must have  such that
such that  .
.
Proposition 6.1.9
If  is a continuous mapping, where
is a continuous mapping, where  is a unit circle, then there exists
is a unit circle, then there exists  such that
such that  , where
, where  .
.
A.6.2. Connected Component and Local Connectedness
Definition 6.2.1
Assume that and  are two points on topologic space . If there exists a connected set such that
are two points on topologic space . If there exists a connected set such that  , then and are called connected.
, then and are called connected.
The connected relation among points on is an equivalence relation.
Definition 6.2.2
Each equivalent class with respect to connected relations on is called a connected component of X.
Definition 6.2.3
For , if A is regarded as a sub-space, its connected component is called a connected component of subset A of X.
Definition 6.2.4
In , for each neighborhood u of , there exist connected neighborhood such that  , then X is called local connected at point x. If for is local connected at x, then X is called a local connected space.
, then X is called local connected at point x. If for is local connected at x, then X is called a local connected space.
Proposition 6.2.1
(1) If Y is a connected subset on X and  , then
, then  .
.
(2) C is a connected subset.
(3) C is a close set on X.
Proposition 6.2.2
In , the following statements are equivalent.
(1) X is a local connected space.
(2) Any connected component of any open set of X is open.
(3) There exists a base on X such that its each member is connected.
Proposition 6.2.3
Proposition 6.2.4
If are local connected spaces, then their product space is also local connected.
Proposition 6.2.5
If is a connected open set, then A must be a connected component of  .
.
A.6.3. Arcwise Connected Space
Definition 6.3.1
If f is an arc on X, then  is called a curve on X.
is called a curve on X.
For  , if there exists an arc
, if there exists an arc  such that
such that  and
and  , then X is an arcwise connected space.
, then X is an arcwise connected space.
For , regarding A as a sub-space, if A is arcwise connected, then A is an arcwise connected subset of X.
Definition 6.3.2
For  , if there is an arc on X that connects and , then and are arcwise connected.
, if there is an arc on X that connects and , then and are arcwise connected.
All points on X are an equivalent relation with respect to arcwise connected relations.
Definition 6.3.3
The points on that belong to an equivalent class with respect to arcwise connected relations are called an arcwise connected component of X.
Proposition 6.3.1
If is arcwise connected, then X is connected.
Proposition 6.3.2
Proposition 6.3.3
If are arcwise connected spaces, then their product space is also an arcwise connected space.
Corollary 6.3.3
Proposition 6.3.4 (Bond Lemma)
Assume that are close sets and .  and
and  are continuous mappings.
are continuous mappings.  , i.e.,
, i.e.,  and
and  are the same on
are the same on  . Let
. Let  . Then, is continuous.
. Then, is continuous.
Proposition 6.3.5
For , if A is an open connected set, then A is arcwise connected.
Definition 6.3.4
In , for any neighborhood of x, if there exists a connected neighborhood  such that
such that  , then X is called local arcwise connected.
, then X is called local arcwise connected.
Proposition 6.3.6
If is local arcwise connected and A is connected, then A is arcwise connected.
Proposition 6.3.7
If is local arcwise connected and is an open connected subset, then A is arcwise connected.
Proposition 6.3.8
The continuous image of a local arcwise connected space is also local arcwise connected.
Proposition 6.3.9
If are local arcwise connected, then their product space is also local arcwise connected.
Definition 6.3.5
The above materials are from [Xio81]. The interested readers can also refer to [Eis74].
A.7. Order-Relation, Galois Connected and Closure Space
A.7.1. Order-Relation and Galois Connected
Definition 7.1.1
Assume that ‘ ’ is a binary relation on
’ is a binary relation on  and satisfies reflexivity and transitivity properties, i.e.,
and satisfies reflexivity and transitivity properties, i.e., ,
,  and
and  , if
, if  and
and  , then
, then  , ‘ ’ is called a pre-order or quasi-order on .
, ‘ ’ is called a pre-order or quasi-order on .
Especially, if ‘ ’ satisfies transitivity and anti-reflexivity, i.e., for , does not hold, then ‘ ’ is a strict pre-order on denoted by ‘ ’ generally.
’ generally.
Definition 7.1.2
If a pre-order relation satisfies anti-symmetry, i.e.,  ,
,  , then is called a partial order relation on .
, then is called a partial order relation on .  is called a partial ordered set.
is called a partial ordered set.
If a pre-order relationsatisfies symmetry, i.e.,,  , thenis called an equivalence relation on . Symbolis not used to denote equivalence relations generally.
, thenis called an equivalence relation on . Symbolis not used to denote equivalence relations generally.
Definition 7.1.3
Assume thatis a semi-order (partial-order) relation on . For any two elements  , if their supremum
, if their supremum  and infimum
and infimum  exist, then is a lattice. For a lattice ,
exist, then is a lattice. For a lattice ,  and
and  are used to represent the supremum and infimum of two elements and generally.
are used to represent the supremum and infimum of two elements and generally.
Especially, if for any  ,
,  and
and  exist, then is called a complete lattice.
exist, then is called a complete lattice.
Definition 7.1.4
(1)  (increasing property)
(increasing property)
(2)  (order-preserving)
(order-preserving)
(3)  (idempotent)
(idempotent)
Then, is a closure operator on . Correspondingly, if a self-mapping  on satisfies order-preserving, idempotent and decreasing property, i.e.,
on satisfies order-preserving, idempotent and decreasing property, i.e.,  , then
, then  is called an interior operator on .
is called an interior operator on .
Note 7.1.1
Note 7.1.2
Assume that is a closure operator on a complete lattice  , where is any given set and
, where is any given set and  is a power set of . Then, uniquely corresponds to a family
is a power set of . Then, uniquely corresponds to a family  of subsets of and
of subsets of and  satisfies (1)
satisfies (1)  , (2)
, (2)  ,
,  , is called a Moore family on , and two-tuple
, is called a Moore family on , and two-tuple  is a closure system.
is a closure system.
Please refer to Davey and Priestley (1992) for more details.
Galois Connection (Davey and Priestley, 1992)
Definition 7.1.5
Assume that  and
and  are a pair of semi-order structures.
are a pair of semi-order structures.  and
and  are a pair of mappings. The domains of and
are a pair of mappings. The domains of and  are and
are and  , respectively. If and satisfy
, respectively. If and satisfy
For and  ,
,  .
.
Then,  is called a Galois connection between and as shown below,
is called a Galois connection between and as shown below,
![]()
Proposition 7.1.1
(1) 
(3) 
Conversely, assume that and are a pair of mappings between and . For  and
and  , the above two conditions (1) and (2) hold. Then, and are a Galois connection between and .
, the above two conditions (1) and (2) hold. Then, and are a Galois connection between and .
Proposition 7.1.2
Assume that is a Galois connection between and  , where and . Then the combination mapping
, where and . Then the combination mapping  is a closure operator on , and
is a closure operator on , and  is an interior operator on .
is an interior operator on .
A.7.2. Closure Operation and Closure Space
The concept of closure operation that we previously introduced is under the order theory sense. The terms of closure operation, closure space and related properties that we will introduce below have the topologic sense, especially under E. Cech sense, i.e., based on set theory and always assuming that there does not appear paradox (Cech, 1966).
Definition 7.2.1
(cl1) 
(cl2)  ,
, 
(cl3) and  ,
, 
then, Proposition 7.2.1
If  is a closure space, then
is a closure space, then
(1) 
(2) For and , if  , then
, then 
(3) For any family  of subsets of , have
of subsets of , have 
Definition 7.2.2
![]()
If  holds, then closure operation
holds, then closure operation  is said to be coarser than
is said to be coarser than  . Equivalently, is said to be finer than .
. Equivalently, is said to be finer than .
Theorem 7.2.1
Binary relationis a semi-order relation on  .
.  has a greatest element
has a greatest element  and a least element
and a least element  . That is, for
. That is, for  , if
, if  , then
, then  , otherwise
, otherwise  ; and
; and  . Furthermore, for any subset
. Furthermore, for any subset  of
of  and , we have
and , we have  , i.e., is order complete with respect to.
, i.e., is order complete with respect to.
Definition 7.2.2
![]()
Correspondingly,  is called
is called  interior of , or simply interior.
interior of , or simply interior.
Proposition 7.2.3
Assume that 
 satisfies axioms int1∼ int3. Define an operation
satisfies axioms int1∼ int3. Define an operation  as follows
as follows
![]()
It can be proved that is a closure operation on and  . If
. If  is a set of mappings on that satisfy axioms int1∼ int3, then there exists one-one correspondence between and . Or a closure operation and an interior operation are dual.
is a set of mappings on that satisfy axioms int1∼ int3, then there exists one-one correspondence between and . Or a closure operation and an interior operation are dual.
Definition 7.2.3
Proposition 7.2.4
(2) For and , if , then  .
.
(3) For any family of subsets of , have 
Definition 7.2.4
A topological closure operation on is a closure operation that satisfies the following condition
![]()
If is a topological closure operation, then closure space is a topological space.
Proposition 7.2.5
If is a closure space, then each condition shown below is the necessary and sufficient condition that is a topological space.
(1) The closure of each subset is a close set
(2) The interior of each subset is an open set
(3) The closure of each subset equals to the intersection of all close sets that include the subset
(4) The interior of each subset equals to the union of all open sets that include the subset.
Theorem 7.2.2
Assume that  is a family of subsets of set that satisfies the following conditions
is a family of subsets of set that satisfies the following conditions
(o1)  ,
, 
(o2)  ,
,  , i.e., is closed for any union operation
, i.e., is closed for any union operation
(o3)  ,
,  , i.e., is closed for finite intersection operation.
, i.e., is closed for finite intersection operation.
Let  is a closure operation on and the set composed by all open sets of is just
is a closure operation on and the set composed by all open sets of is just  .
.
Then, there just exists a topological closure operation  on
on  such that is the roughest element on .
such that is the roughest element on .
Theorem 7.2.3
Assume that  is a family of subsets of set that satisfies the following conditions
is a family of subsets of set that satisfies the following conditions
(c1)  ,
, 
(c2)  ,
,  , i.e., is closed for any union operation
, i.e., is closed for any union operation
(c3)  ,
,  , i.e., is closed for finite intersection operation.
, i.e., is closed for finite intersection operation.
Then, there just exists a topological closure operation on such that is just a set that composed by all close sets on  .
.
Using open set as a language to describe topology, axioms (o1) ∼ (o3) are used. However, conditions (cl1) ∼ (cl4) are called axioms of Kuratowski closure operator. Kuratowski closure operator, interior operator that satisfies axioms (int1) ∼ (int3) and (int4):  , open set and neighborhood system are equivalent tools for describing topology. For describing non-topologic closure spaces, only closure operations, interior operations and neighborhood systems can be used, but open set or close set cannot be used as a language directly. In some sense, closure spaces are more common than topologic spaces. We will discuss continuity, connectivity and how to construct a new closure space from a known one below.
, open set and neighborhood system are equivalent tools for describing topology. For describing non-topologic closure spaces, only closure operations, interior operations and neighborhood systems can be used, but open set or close set cannot be used as a language directly. In some sense, closure spaces are more common than topologic spaces. We will discuss continuity, connectivity and how to construct a new closure space from a known one below.
A closure operation on a domain set is defined as a mapping from to itself, where domain  and codomain
and codomain  . Closure operation is completely defined by binary relation
. Closure operation is completely defined by binary relation  , i.e., and ,
, i.e., and ,  . Obviously, we have
. Obviously, we have  .
.
Compared to , relation  more clearly embodies the intuitive meaning of closure operation, i.e., what points are proximal to what sets. Naturally, the intuitive meaning of continuous mappings is the mapping that remains the ‘ is proximal to subset ’ relation.
more clearly embodies the intuitive meaning of closure operation, i.e., what points are proximal to what sets. Naturally, the intuitive meaning of continuous mappings is the mapping that remains the ‘ is proximal to subset ’ relation.
Definition 7.2.5
Theorem 7.2.4
(1) f is a continuous mapping
(2) For ,  holds.
holds.
(3) For  ,
,  holds.
holds.
Definition 7.2.6
Definition 7.2.7
If there exists a homeomorphous mapping from closure space to , then and are called homeomorphous closure spaces.
Definition 7.2.8
If a closure space has property  such that all spaces that homeomorphous to have the property, then is called the topological property.
such that all spaces that homeomorphous to have the property, then is called the topological property.
Obviously, the homeomorphous relation is an equivalent relation on the set composed by all closure spaces.
Definition 7.2.9
Definition 7.2.10
Below we will discuss how to generate a new closure operation from a known closure operation, or a set of closure operations. Two generated approaches are discussed, the generated projectively and generated inductively. The product topology and quotient topology discussed in point topology are special cases of the above two generated approaches in closure operation.
Definition 7.2.11
![]()
The above closure operation is the finest one among all closure operations that make  continuous.
continuous.
The closure operation on generated inductively by a set  of mappings is defined as follows
of mappings is defined as follows
![]()
The above closure operation is the finest one among all closure operations that make each ,  continuous.
continuous.
Proposition 7.2.6
Definition 7.2.12
![]()
The above closure operation is the coarsest one among all closure operations that make continuous. The closure operation on generated projectively by a set of mappings is defined by  . It is the coarsest one among all closure operations that make each , continuous.
. It is the coarsest one among all closure operations that make each , continuous.
Note that  is not necessarily the
is not necessarily the  . And the latter is not necessarily a closure operation, unless a set
. And the latter is not necessarily a closure operation, unless a set  of closure spaces satisfies a certain condition (Cech, 1966).
of closure spaces satisfies a certain condition (Cech, 1966).
A.7.3. Closure Operations Defined by Different Axioms
Two forms of closure that we mentioned previously are denotes by closure operator and closure operation, respectively. The former is under order theory sense and the latter is under topologic sense. In fact, the term of closure does not have a uniform definition. In different documents it might have different meanings. We introduce different definitions of closure, quasi-discrete closure space, Allexandroff topology, etc. below.
Table 7.3.1
| (CL0) | (CL1) | (CL2) | (CL3) | (CL4) | (CL5) | |
| Neighborhood space | ♦ | ♦ | ♦ | |||
| Closure space | ♦ | ♦ | ♦ | ♦ | ||
| Smith space | ♦ | ♦ | ♦ | |||
| Cech closure space | ♦ | ♦ | ♦ | ♦ | ||
| Topological space | ♦ | ◊ | ♦ | ♦ | ♦ | |
| Alexandroff space | ♦ | ◊ | ♦ | ◊ | ♦ | |
| Alexandroff topology | ♦ | ◊ | ♦ | ◊ | ♦ | ♦ |
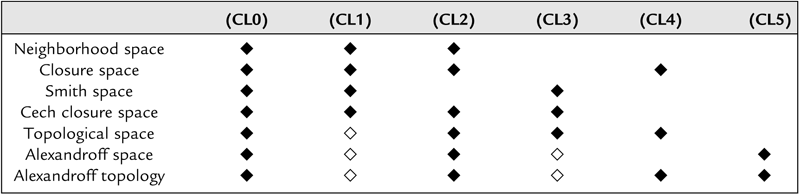
♦: the axiom satisfied by definition ◊: the property induced by definition.
Using the dual interior operation  of
of  , we have the following equivalent axioms (CL0)∼(CL5). For
, we have the following equivalent axioms (CL0)∼(CL5). For  , we have
, we have
Note 7.3.1
Under the general order theory sense, the closure space is defined by axioms (CL1), (CL2) and (CL4). For example, the closure operation defined by Definition 7.1.4 is called closure operator. When considering the inclusion relation between a power set and a subset, the axiom (CL0) may be or may not be satisfied.
Note 7.3.2
Under the Cech’s sense, the closure space is called pre-topology and is defined by axioms (CL0)∼(CL3). In Definition 7.1.4, axioms (CL0) and (CL3) are replaced by (CL3)’. The topology described by the Kuratowski closure operator that satisfies axioms (CL0), (CL2), (CL3)’ and (CL4) is equivalent to the above description, since axiom (CL3)’ may induce axiom (CL3), and (CL4)+(CL3) may induce (CL3)’. The distinction between the closure space in the Cech’s sense and the topologic space in general sense is the satisfaction of the idempotent axiom or not. So the former is the extension of the latter.
Note 7.3.3
Axiom (CL5) is called Alexandroff property. The topologic space that satisfies the Alexandroff property is called Alexandroff topology. In Cech (1966) and Galton (2003), axiom (CL5) is called quasi-discrete property. The Cech closure space that satisfies quasi-discrete property is called quasi-discrete closure space.
Note 7.3.4
To describe the closure space, except closure and interior operations, the neighborhood and the filter convergent sequence can be used equivalently. In Table 7.3.1, the neighborhood and Smith spaces (Kelly, 1955; Smith, 1995) originally are described by neighborhood language; we use the equivalent closure axioms.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.