
In every robotics project the robot needs to get some mobility. For mobility, we use DC motors or servos. This section will deal with motors and types of motor. The next section will deal with how we can control the motors using the Intel Edison.
Electrical motors are electromechanical devices that convert electrical energy to mechanical energy. The two electrical components in a motor are the field windings and the armature. It's a two pole device. The armature is usually on the rotor, while the field windings are usually on the stator.
Permanent magnet motors use permanent magnets to supply field flux:

These motors are restricted by the load they can drive, and that's a disadvantage. However, considering the fact that we are focusing on robotics and on a small-scale basis, we are opting for this kind of motor.
These motors generally operate at 9V-12V, with a maximum full-load current of around 2-3 A. In robotics, we mainly deal with three types of DC motor:
- Continuous DC
- Stepper
- Servo
Continuous DC motors are continuous rotation devices. When the power is switched on the motor rotates, and if polarity is reversed, it rotates in the opposite direction. These motors are widely used for providing mobility to the robot. Normally, DC motors come with gears, which provide some more torque:

{kind=link}
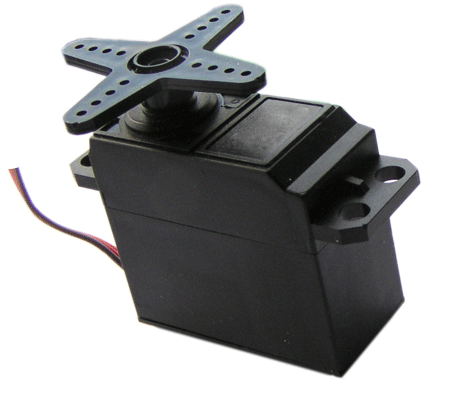
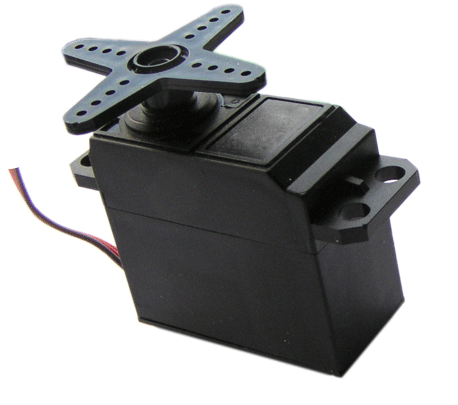
The next category is a servo motor. The speed of these motors is controlled by varying the width of pulses with a technique known as pulse width modulation. Servo motors are generally an assembly of four things: a DC motor, a gearing set, a control circuit and a position sensor (usually a potentiometer). Generally, a servo motor contains three set of wires: Vcc, Gnd, and signal. Due to thier precise nature, servo motors have a complete different use case, where position is an important parameter. Servo motors do not rotate freely like a standard DC motor. Instead, the angle of rotation is limited to 180 degrees (or so) back and forth. The control signal comes as a Pulse Width Modulation (PWM) signal:
{kind=link}
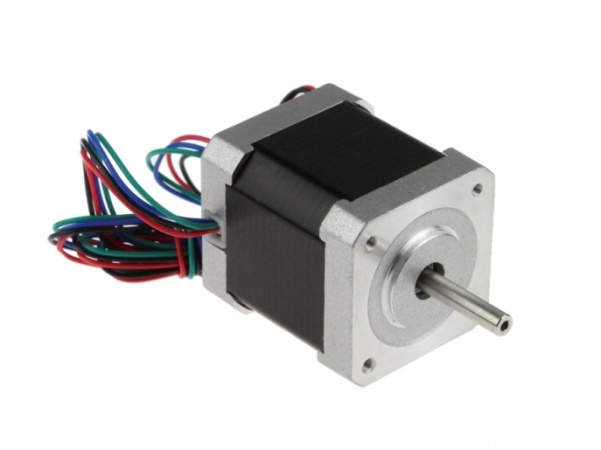
Finally, stepper motors are an advanced form of servo motor. They provide a full 360-degree rotation and it's a continuous motion. The stepper motor utilizes multiple toothed electromagnets arranged together around a central gear to define the position. They require an external controller circuit to individually excite each electromagnet. Stepper motors are available in two varieties; unipolar and bipolar. Bipolar motors are the strongest type of stepper motor and usually have four or eight leads:
In the project of line following, we'll be dealing with DC motors. But motors cannot be directly hooked up to the Intel Edison, and therefore we need an interfacing circuit, more commonly known as a motor driver.