
Two-wheel drive (2WD) refers to the driving mechanism involving two motors and two wheels, and it may typically contain a castor for balancing:
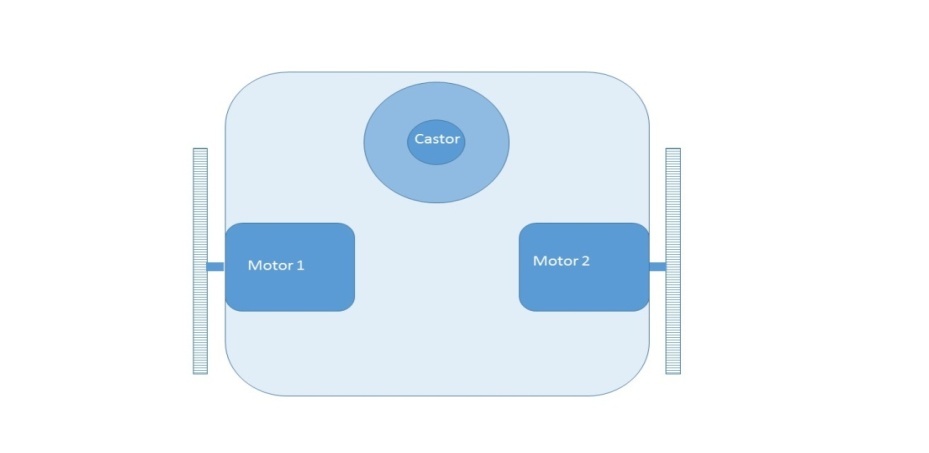
The rear motors provide mobility and also acts as a steering mechanism for the robot. For the robot to move right, you may switch off the right motor and let the left motor do the work. However, in that way, the turning radius may be more extreme and the power consumption for the left motor increases as it needs to overcome the force of friction provided by the right wheel. The castor being omni-directional provides less resistance, but this isn't necessarily preferred. The other way is to rotate the right wheel backwards while the left wheel moves forwards; this method allows the robot to turn on its own axis and provide a zero turning radius:

When we follow the preceding method, there is a lot less stress on the motors, and with the castor being omni-directional, the robot executes an almost perfect turn.
A chassis can be built with any material and the design should be such that it provides as less stress as possible on the motors.
However, when dealing with four-wheel drives, design plays a factor:

Typically, these are powered by four motors (here, motor 1 are the left-side motors, whereas motor 2 are the right-side motors), which can be controlled independently. Usually during rotation, we don't stop the motors on the other side because it creates a lot of pressure on those motors. The other possible option is to rotate on opposite sides—but there is a catch.
Usually, the length of the robot in these cases needs to be either equal to the breadth or even less so. Otherwise, a condition may arise called wheel slip. To prevent such a condition, the design is normally such that the entire model, along with its wheels, fits in a circle, shown as follows:
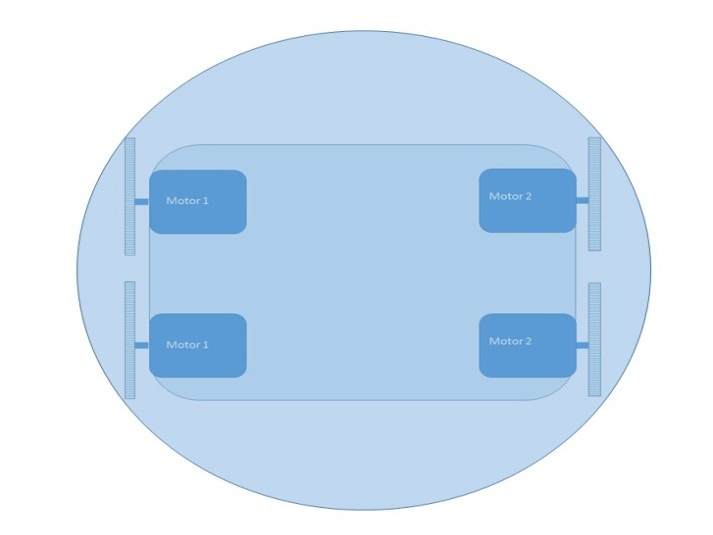
There is another parameter that may be considered and that is the distance between two wheels, as it must be less than the diameter of the wheels. This is because if we are exposed to rough terrain, the bot will be able to come out.
This will happen if the structure of the bot fits in a circle and the length and the distance between the front and rear wheels are less than the distance between the left and right side. Here, while wheel slip happens, it's reduced considerably and is almost negligible. Have a look at the following image for more information:

In the preceding image, the concept should become clearer as the robot tends to stay in the circle it's enclosed in, executing more or less a pivotal turn or a zero radius turn.
Now that we know how the robot chassis can be designed, let's have a look at the ready-made designs available. On sites such as Amazon and eBay, a lot of chassis are available pre-fabricated, following existing design patterns. If you want to fabricate your own chassis, then it's better to follow the preceding design pattern, especially in a 4WD configuration.