
Chapter 13 addressed some initial topics concerning rotation, and this chapter continues with that theme. Previous discussions dwelled on sideways spin in the game of pool but glossed over topspin and backspin, which are more common. Both topspin and backspin are usually referred to as rolling, and rolling is probably what first comes to mind when you consider what a pool ball does. The question arises, however, as to why and how a ball rolls at all. After all, if a ball were moving through empty space, it would not be expected to roll. In fact, in calculations of momentum in Chapter 13, spin was completely ignored.
A ball rolls for the same reason that a block stays still: the force of friction. As a ball rolls, its surface is in contact with another surface. Whenever two objects are in contact with each other and move in opposing directions tangentially to their point of contact, friction arises. You’ve already made use of this notion to explain why pool balls rebound at an angle when they strike a cushion with sidespin (or “English”) applied. In this chapter, this phenomenon is examined in greater detail.
Friction is principally caused by irregularities on the surface of an object. Consider the surface of a brick compared to the surface of marble. The surface of a brick is rough while the surface of marble is smooth. A brick will have more friction than a piece of marble if it slides along a given surface. If you were to use a microscope to examine two surfaces moving against each other, you would see pits and ridges on the surfaces. As these surfaces collide with each other, they create a force that acts tangentially to the plane of contact—or along the direction of motion. This, then, is friction. In the last chapter, you looked at the result of an instantaneous frictional force applied during a collision. Here, you look at the more conventional issue of friction acting continuously on a sliding object.
Because its magnitude varies according to the force perpendicular to it, friction is an unusual force. In fact, friction is proportional to the normal force. For any two objects there is a value μ, the coefficient of friction, such that
Force due to friction = μ × force perpendicular to friction
Figure 14.1 shows an example of friction in action. A box with weight W moves on a slope (often called an inclined plane) with an angle of θ to the horizontal. The weight of the box acts downward, which means that it experiences a force of W cos θ perpendicular to the slope. This gives it a frictional force of μW cos θ along (and opposing) the direction of motion. The total force experienced tangential to the plane is W sin θ – μ cos θ = W (sin θ – μ cos θ).
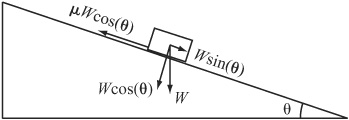
In Figure 14.1, if you reflect on the implications of Newton’s third law, since the box experiences an opposing normal force of W cos θ, it is in equilibrium normal to the plane. The friction is created by the opposition of these two forces. The frictional force applies as long as the box is moving, so for example, if the plane has a slope of exactly the correct angle, friction will cancel the force due to gravity. The result is that the box will move with a constant speed, a fact that you use to measure the coefficient of friction. To calculate the angle at which friction is canceled, you can use the following approach:
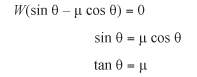
If θ is smaller than μ, then the box gradually slows to a stop; if θ is greater than μ, then gravity overcomes friction and the box accelerates.
The discussion so far has been somewhat simplified because in fact there are two different coefficients of friction. The previous discussion concerns the coefficient of kinetic friction. However, a second form of friction also applies. This is the coefficient of static friction, which applies when an object is not moving but is experiencing a sliding force. In this situation, the force of the object resists movement.
The coefficient of kinetic friction is usually written as μK while the coefficient of static friction is written as μS. Since it represents a maximum possible force, rather than the actual value, static friction is slightly harder to grasp than kinetic. As long as you push it with a smaller amount of force than what is accounted for by static friction, the object will not move. An equal force resists the force of movement.
In general, the coefficient of static friction (μS) is greater than the coefficient of kinetic friction (μK). The result is that more force is that required to make something move than to accelerate it when already moving. In the example given by Figure 14.1, involving an inclined plane, imagine that the box is resting on the plane. The static friction is given by μS W cos θ, which is the maximum possible frictional force applied while static. As long as the force due to the box’s weight is less than this, the box will not move. In other words, the box remains stationary if tan θ < μS, and the value of θ in this condition is sometimes called the critical angle.
Ultimately, then, there is a region of angles for the plane such that if the box is stationary, it will not move. Likewise, there are also regions or angles for the plane for which, if the box is moving, it will continue to move. This applies as long as μK < tan θ < μS.
The resultantForceOnObject() function applies this generality:
function resultantForceOnObject (nonFrictionalForce, velocity,
coefficient)
set tang to norm(velocity)
set norm to normalVector(tang)
set normalForce to component (nonFrictionalForce, norm)
set tangentialForce to component (nonFrictionalForce, tang)
set frictionalForce to coefficient * magnitude(normalForce)
if frictionalForce>tangentialForce and magnitude(velocity)>0
then return vector(0,0)
otherwise return (tangentialForce - frictionalForce) * tang
end function
The resultantForceOnObject() function works equally well for static and kinetic friction. To accommodate the two types of friction, replace the coefficient with the correct value depending on whether the object is currently moving or stationary. The parameter nonFrictionalForce is the force on the object due to any factors other than its interaction with the plane—the force it would be experiencing if the plane was not there. The return value is the total force on the object, including both friction and the reaction force due to Newton’s third law, and is therefore parallel to the plane. You might like to try making a more specialized version of this function to deal with the specific case of an object sliding down an inclined plane.
When friction must be accounted for in a mechanical simulation, issues arise that involve conservation of energy and momentum. Since it isn’t useful when dealing with objects that are fixed in place, however, conservation of momentum is not an important concern. The energy is mostly lost to heat to the detriment of both bodies involved.
You can calculate the energy lost due to friction by looking at the amount of work. Work is another word for energy. It designates the energy used to perform a task, usually making an object move. Here is how work is expressed:
Work = Force × Distance moved
This expression indicates that the harder you push something, the more energy it takes to travel a particular distance. And notice also that if something doesn’t move, no work is done, no matter how hard you are pushing it. Work is useful energy.
Defining work as useful contrasts to the normal usage of the word “work.” The normal usage suggests that whether something moves does not matter. For example, consider what happens if you push at an immovable brick wall with all your strength. As furious as it might be, this effort involves energy only on your part. The wall does not change position. As a result, in terms of the physics of the event, no work is done. Your energy is mostly spent on chemical reactions in your muscles. This is a case involving static friction, and friction of this type does not affect energy calculations.
However, if an object is moving and experiencing kinetic friction, then you can calculate the work done by the friction, which is a constant multiple of the distance traveled:
Work done = Frictional force × distance = μ × Normal force × distance
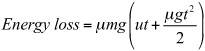
This equation is complicated by the fact that the distance traveled is also a function of the force. Suppose your object is sliding on a table, like a hockey puck. In this case, the friction is the only force acting on it. In a particular time t, the puck moves by a distance equal to ![]() . By Newton’s second law, since the acceleration is the force divided by the mass, you have
. By Newton’s second law, since the acceleration is the force divided by the mass, you have ![]() , so the energy lost is equal to
, so the energy lost is equal to ![]() . Still, since the force depends on the puck’s weight, mg, the equation must take the following form:
. Still, since the force depends on the puck’s weight, mg, the equation must take the following form:
On the other hand, it’s easier to calculate the loss of speed, which is a simple linear decrease:
Speed loss = μgt
If you look back at the pool game simulation as explained in previous chapters, you can see that this turns out to be exactly as you calculated it. However, since events become more complex when you deal with balls rather than boxes, it will be necessary to once again examine what happens.
There is another kind of friction you haven’t looked at yet, which is air resistance, or more generally, fluid resistance or drag. The word “fluid” is used to mean either a liquid or a gas since, generally, liquids and gases have similar properties. With respect to how drag can be understood, the previous definition of friction must be qualified. The primary reason for this is that force is applied in a different way. A body falling through the air meets resistance due to constant forward collisions with air molecules. This type of collision differs from what has been discussed previously, where a sliding force like a box on the ground has been involved.
Calculating drag is more complicated than calculating friction. Like friction, the important value is a constant coefficient, the drag coefficient, commonly expressed as CD. The equation for drag assumes the following form:
In the equation for drag, the Greek letter rho (p) is the pressure of the fluid, A is the forward area presented to the fluid, and v is the speed. Do not worry about the pressure and area terms. In this context, since you are dealing with simpler problems, the values for these variables are constant. All you need to know is that the drag force is proportional to the square of the speed. You can represent this using your own drag coefficient, which in this context can be represented by μD. Then you can write,
Drag force = μDv2
Note
Other terms should play a part, also. For example, the pressure of a fluid is a measure of how densely packed its molecules are, so the higher it is, the more collisions the falling body will experience. Similarly, the greater the surface area of the body, the more molecules it will hit on the way down. This is why a parachute falls slower than a pea. Since it, too, is dependent on the area of contact, you could also split up the coefficient of friction in much the same way.
Because drag is dependent on speed, at some stage, a falling object will reach a speed at which the drag is equal to the pull of gravity. At this speed, the object stops accelerating. This speed is called terminal velocity. You can calculate it as follows:

Since μD is proportional to area, terminal velocity will be inversely proportional to the square root of area. Furthermore, the area of a circle or a sphere is proportional to the square of its radius, so terminal velocity is inversely proportional to radius. If you double the radius of your parachute, you will halve your terminal velocity (which has to be a good thing).
As the previous section revealed, drag is a reasonably straightforward topic. With respect to simulations, it is just another small thing to consider. In practical terms, it can be dealt with by simple methods such as those used previously for the pool game. However, other considerations also arise, somewhat complicating things.
Cars have wheels, and forces move the wheels. When a car moves, linear forces in the cylinders are converted to a torque that is applied to the wheel axle (or axles in a four-wheel-drive machine). This causes the wheels to turn, but it remains to settle the question of just why does the car move. Tires are mounted on the wheels. Why don’t the tires simply spin, as they do when a car is stuck in the mud? The answer lies in the behavior of friction. Friction makes the car move, and when friction works in this way, it is called traction or grip.
Grip is basically static friction. When your car’s tires are in contact with the road and trying to turn, they meet with resistance from the static friction with the road. This resistance counteracts the torque on the wheels, meeting it with a forward force. Since it causes the car’s wheels to roll instead of spinning in place, the force that moves your car forward is friction, and it acts in the direction of motion. In fact, the car only moves as a consequence of Newton’s third law. The force that moves it forward is a reaction to the force exerted by the tires on the road. Because the road can’t move backward, the car has to move forward.
You can calculate the force on the road at the point of contact. If the wheels are experiencing a total torque of T and have a radius of r, the force at any point on the surface of the wheel is ![]() . What happens if this force is greater than the static friction of the tire with the road? Then the wheel starts to slip, and the car doesn’t move. Instead, it sits and literally “burns rubber.” As a result, a major part of successful driving involves controlling the torque applied to the wheels.
. What happens if this force is greater than the static friction of the tire with the road? Then the wheel starts to slip, and the car doesn’t move. Instead, it sits and literally “burns rubber.” As a result, a major part of successful driving involves controlling the torque applied to the wheels.
Gearing provides even more control over the level of torque. When you press the accelerator, it increases the amount of fuel the engine burns, which increases the power, or amount of energy released per second. But power can be transferred in different ways. Just as work is force multiplied by distance, so power is given by torque and angular speed:
Power = force × speed = torque × angular speed
When increasing the power, the result is that the force/torque is increased, and thus the acceleration, or the speed can be increased. Gearing allows you to make the trade-off. At a low gear, you have high torque and high acceleration but low maximum speed. At a higher gear, you have less acceleration but can travel faster. This is why you use low gears to get up to speed, but then switch to a higher gear for efficient cruising. It’s also why you’re better off shifting down a gear to overtake than shifting up. Conversely, its why in order to get out of a skid, you shift into a higher gear, reducing the torque and so making it easier to maintain your grip on the road.
Braking behaves in much the same way as acceleration, but the effects are the opposite. When you brake, you apply a reverse torque on the wheels. You don’t want to stop them altogether by locking them since this creates a frictional force against the road that is too strong for static friction to overcome, resulting in a skid. Instead you try to bring the wheels to a controlled halt, maintaining traction with the road.
This leads back to pool balls. When you strike head-on with another ball or a cue stick, a pool ball at first starts to move without spinning, as if it were on a Newton’s Cradle. However, this does not last long, for as it slides along the table, it experiences kinetic friction. This slows the whole ball down, but it also imparts a spin, since it’s a force applied at an angle. Reaching critical speed, when the surface velocity of the spinning ball is equal to the current speed of the ball, it is no longer sliding. Instead, it is rolling like a wheel.
At this moment, kinetic friction ceases to be an issue, and static friction comes into play. Unlike kinetic friction, static friction doesn’t slow the ball down, so its rate of speed changes. The change is characterized by lost energy due to drag in the air, inelasticity of collisions, and some kinetic friction affecting the speed of rolling. With respect to kinetic energy, each time the ball moves, it has to squash down fibers of cloth, and this imparts a certain amount of drag in itself.
The result of this is that balls on a pool table have a tendency to spin forward in the direction of travel. They spin. This type of spin is called topspin. In the reverse direction, it is called backspin. As with sideways spin, you can impart topspin or backspin when you strike the cue ball by applying the cue impulse off-center. Whatever you do, as soon as the ball starts to move, it begins to try to roll.
An additional complication applies to this situation. Topspin or backspin makes the ball act a bit like a wheel. If the ball has topspin greater than the natural rolling pace, the friction is going to act forward instead of backward, accelerating the ball forward at the same time as it slows its spin. Conversely, if it’s spinning fast enough, with backspin the frictional force may be enough to slow the ball and make it travel in the opposite direction.
All of this is particularly noticeable when you deal with collisions. When colliding with another ball (characterized by a very low coefficient of friction), topspin is unaffected. The result is that the ball is still trying to roll forward even as it rebounds backward. This spin then acts like a wheel, driving the ball to try to continue in the same direction it was going before. If the ball has backspin at the moment of collision, then this increases its rebound.
You should try these things out when you next encounter a pool table. Remember Newton’s Cradle. When one ball strikes another along the line of the velocity vector, the first ball stops dead while the other moves off at the same speed. But if you hit the cue ball near the top, when it collides with the object ball, it stops briefly and then rolls forward. If you hit it near the bottom, it stops and then rolls backward.
Not only wheels move by using friction. Humans propel themselves by the same principle. They use their feet to exert a backward force on the ground. The ground responds to this force with a frictional forward force.
For you to be able to take a step, it is necessary for traction to exist between your feet and the ground. If there is a low coefficient of friction, this technique won’t work. Like a wheel spinning, the force you exert backward quickly overcomes the static friction and acts as a torque on your body. The result is spin, and you slip or fall. Various tricks can be used to prevent the risk of this, including swinging your arms to provide a counteracting torque. This action is similar to that of a helicopter, which uses a second propeller to overcome the rotation induced by the first. If all else fails, you can switch to a different strategy for movement. Instead of using friction, you can use balance, moving one leg at a time a short distance forward while balancing carefully on the other. Animals with four feet have an advantage here.
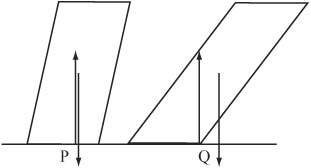
Generally, an object falls over if it experiences a net torque. As shown in Figure 14.2, two objects are experiencing an upward force from the ground and a downward force due to their weight. In both cases, the weight can be thought of as passing through the center of gravity. In the first case (P), the weight is directed through a point of contact with the ground at P, which means that the net torque is zero. In the second case (Q), the weight passes through the ground outside the point of contact, which means that the point Q acts as a fulcrum.
When you walk, you use your sense of balance to manipulate these forces, rolling your foot to change the point of contact with the ground and shifting your arms and your hips. Eventually, you reach a moment when you begin to fall over, but then your other foot reaches the ground and catches you.
Note
With respect to Figure 14.2, you might think in the first case (P) that since the center of gravity is not above the center of the line of contact, there would be a net force to one side of it, giving it a torque. However, just as the weight acts through the center of gravity, the reaction force also balances out and can be thought of as a point force upward at P. The effect is a little like when you use two trestle tables to support a platform. The weight is distributed across the two fulcra. In this case, the trestle is upside down.
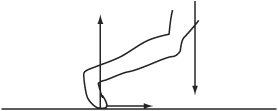
Figure 14.3 illustrates how you make use of the forces discussed in the previous paragraphs to maximize the advantage of friction. When running, since you get much stronger torque from the ground, to stop from spinning, you lean forward, creating a counter-torque. As a bonus, it also means that the force you can apply to the ground is greater, since a greater proportion of the strength of your legs is directed along the line of the ground.
Write a function named applyFriction() with parameters for velocity, topSpin, radius, mass, muK, muS, and time. Taking friction into account, calculate the motion of a pool ball.
The function should take the current status of the ball and return its new velocity and spin. It should account for the coefficients of friction. Assume that friction is applied at a constant level during a short time period.
This is the first of three chapters that deal with some slightly less common topics in mechanics. These topics involve situations that you’re unlikely to encounter commonly, but from time to time you do need to understand how they work if you are to employ them in your programs. In light of this, few equations and only the most generic code examples have been provided.
Over the whole of this chapter, perhaps the most important thing to take away with you is a general understanding of how friction works and applies in different circumstances. In this respect, explorations of the pool ball prepare you for working in at least one game context. The next chapter pursues still another set of supplementary topics, concluding your exploration of energy and momentum. There you will look at continuous momentum and tension.