5.4 STEADY STATE RESPONSE
The purpose of automatic load frequency control (ALFC) is to maintain the desired output of a generator unit while controlling the frequency of the larger interconnection. The ALFC also helps to keep the net interchange of power among pool members at pre-determined values. One of the objectives of the loop is to maintain constant frequency in spite of floating loads.
Output → ∆f
Inputs → ∆PC, ∆PD
where ∆PC = Change in speed changer setting, and
∆PD = Change in load demand.
The speed changer has a fixed setting, i.e. ∆PC = 0 and the load demand changes.
This is called as free governor operation.
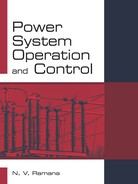
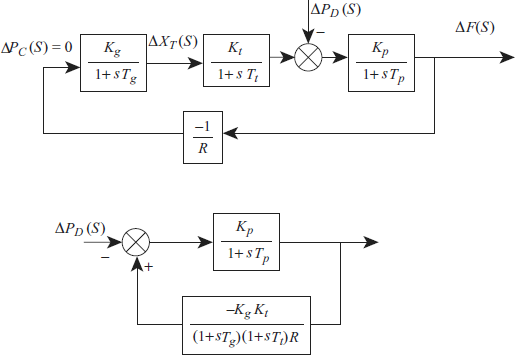
(i) Let us assume that the speed changer has a fixed setting ∆PC (S) = 0.
Assume that there is a small step of change of load demand ![]()


KT, KP are fixed for turbine and power system. Kg is the speed governor gain. It can easily adjustable by varying the lengths of various links.

(ii) There is a step change in speed governor setting and the demand remains constant, i.e., ![]()

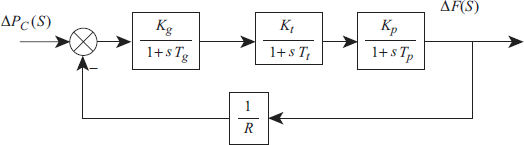


If the speed changer setting is changed by ∆PC and the load demand changes by ∆PD, the steady state frequency change is obtained by superposition theorem, i.e.,
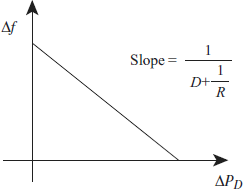
Fig 5.7

R → Speed Regulation
D → Demanding coefficient
Typical values of D = 0.01 MW/Hz, R = 3.
∆ƒ ≈ –R∆PD