
Problem 3.7
Delta-Sigma modulator synthesis
Anders Rantzer
Dept. of Automatic Control
Lund Institute of Technology
P.O. Box 118
SE-221 00 LUND, Sweden
1 DESCRIPTION OF THE PROBLEM
Delta-Sigma modulators are among the key components in modern electronics. Their main purpose is to provide cheap conversion
from analog to digital signals. In the figure below, the analog signal r with values in the interval [-1, 1] is supposed to
be approximated by the digital signal d that takes only two values, -1 and 1. One can not expect good approximation at all
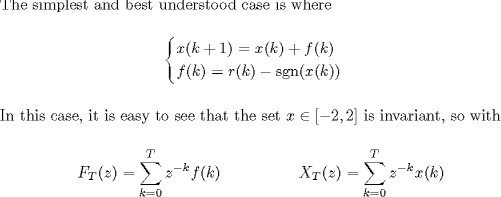
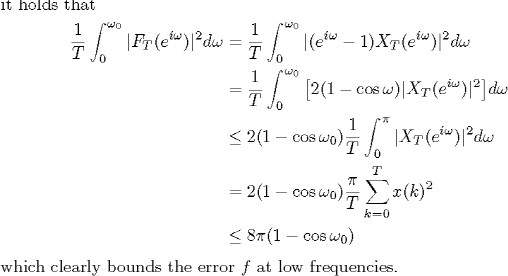
frequencies. Hence, the dynamic system D should be chosen to minimize the error f in a given frequency range ![]()
There is a rich literature on Delta-Sigma modulators. See [2, 1] and references therein. The purpose of this note is to reach a broad audience by focusing on the central mathematical problem.

To make a precise problem formulation, we need to introduce some notation:


Another option is to allow D to be stochastic system and put a bound on the spectral density of f in the frequency interval. This would be consistent with the wide-spread practice to add a stochastic “dithering signal” before the nonlinearity in order to avoid undesired periodic orbits.
2 AVAILABLE RESULTS
Many modifications using higher order dynamics have been suggested in order to further reduce the error. However, there is
still a strong demand for improvements and a better understanding of the nonlinear dynamics. The following two references
are suggested as entries to the literature on ![]() -modulators:
-modulators:
BIBLIOGRAPHY
[1] James A. Cherry, Continuous Time Delta-Sigma Modulators for High Speed A/D Conversion: Theory, Practice![]() Fundamental Performance Limits, Kluwer, 1999.
Fundamental Performance Limits, Kluwer, 1999.
[2] S. R. Norsworthy, R. Schreier, and G. C. Temes, Delta-Sigma Data Converters, IEEE Press, New York, 1997.