
Problem 6.2
The strong stabilization problem for
linear time-varying systems
Avraham Feintuch
Department of Mathematics
Ben-Gurion University of the Negev
Beer-Sheva
Israel
1 DESCRIPTION OF THE PROBLEM
feedback system {L, C} with plant L and compensator C, and {L, C} is stable if it has a bounded causal inverse. L is stabilizable if there exists a causal linear system C (not necessarily stable) such that {L, C} is stable.
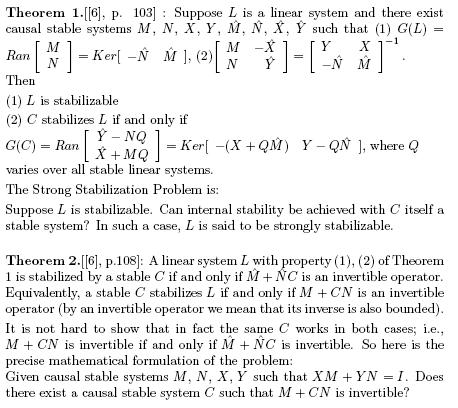
The analogue of the result of Youla et al. which characterizes all stabilizable linear systems and parametrizes all stabilizers was given by Dale and Smith [4]:
2 MOTIVATION AND HISTORY OF THE PROBLEM
The notion of strong internal stabilization was introduced in the classical paper of Youla et al. [2] and was solved for rational
transfer functions. Another formulation was given in [1]. An approach to the classical problem from the point of view described
here was first given in [9]. Recently sufficient conditions for the existance of strongly stabilizing controllers were formulated
from the point of view of ![]() control problems. The latest such effort is [7].
control problems. The latest such effort is [7].
It is of interest to write that our formulation of the strong stabilization problem connects it to an equivalent problem in Banach algebras, the question of 1-stability of a Banach algebra: given a pair of elements {a, b} in a Ba-

BIBLIOGRAPHY
[1] B. D. O. Anderson, “A note on the Youla-Bongiorno-Lu condition, ” Automatica 12 (1976), 387-388.
[2] J. J. Bongiorno, C. N. Lu, D. C. Youla, “Single-loop feedback stabilization of linear multivariable plants, ” Automatica 10 (1974), 159-173.
[3] G. Corach, A. Larotonda, “Stable range in Banach algebras, ” J. Pure and Applied Alg. 32 (1984), 289-300.
[4] W. Dale, M. Smith, “Stabilizability and existance of system representations for discrete-time, time-varying systems, ” SIAM J. Cont. and Optim. 31 (1993), 1538-1557.
[5] C. A. Desoer, R. W. Liu, J. Murray, R. Saeks, “Feedback system design: the factorial representation approach to analysis and synthesis, ” IEEE Trans. Auto. Control AC-25 (1980), 399-412.
[6] A. Feintuch, “Robust Control Theory on Hilbert Space, ” Applied Math. Sciences 130, Springer, 1998.
[7] H. Ozbay, M. Zeren, “On the strong stabilization and stable ![]() controller design problems for MIMO systems, ” Automatica 36 (2000), 1675-1684.
controller design problems for MIMO systems, ” Automatica 36 (2000), 1675-1684.
[8] S. Treil, “The stable rank of the algebra ![]() equals 1, ” J. Funct. Anal. 109 (1992), 130-154.
equals 1, ” J. Funct. Anal. 109 (1992), 130-154.
[9] M. Vidyasagar, Control System Synthesis: A Factorization Approach, M.I.T. Press, 1985.