
Problem 6.3
Robustness of transient behavior
Diederich Hinrichsen, Elmar Plischke, and Fabian Wirth
Zentrum für Technomathematik
Universität Bremen
28334 Bremen
Germany
{dh, elmar, fabian}@math.uni-bremen.de
1 DESCRIPTION OF THE PROBLEM
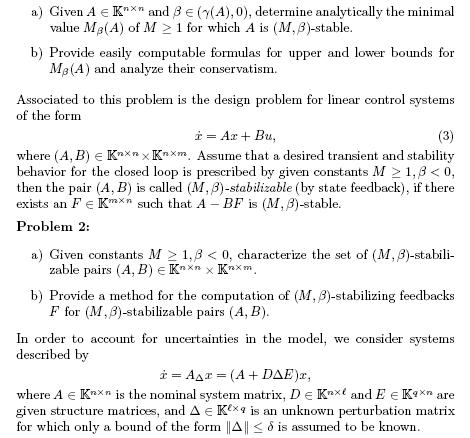
Problem 1:
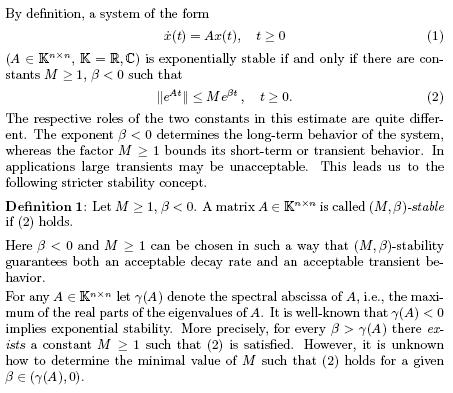
2 MOTIVATION AND HISTORY OF THE PROBLEM
Stability and stabilization are fundamental concepts in linear systems theory and in most design problems exponential stability is the minimal requirement that has to be met. From a practical point of view, however, the transient behavior of a system may be of equal importance and is often one of the criteria that decides on the quality of a controller in applications. As such, the notion of (M, β )-stability is related to such classical design criteria as “overshoot” of system responses. The question of how far transients move away from the origin is of interest in many situations; for instance, if certain regions of the state space are to be avoided in order to prevent saturation effects.
A similar problem occurs if linear design is performed as a local design for a nonlinear system. In this case, large transients may result in a small domain of attraction. For an introduction to the relation of the constant M with estimates of the domain of attraction, we refer to [4, Chapter 5]. The solution of Problem 4 and also of the other problems would provide a way to design local linear feedbacks with good local estimates for the domain of attraction without having to resort to the knowledge of Lyapunov functions.
While the latter method is excellent if a Lyapunov function is known, it is also known that it may be quite hard to find them or if quadratic Lyapunov functions are used then the obtainable estimates may be far from optimal, see section 3.
Apart from these motivations from control the relation between domains of attraction and transient behavior of linearizations at fixed points is an active field in recent years motivated by problems in mathematical physics, in particular, fluid dynamics; see [1, 10] and references therein. Related problems occur in the study of iterative methods in numerical analysis; see e.g., [3].
We would like to point out that the problems discussed in this note give pointwise conditions in time for the bounds and are therefore different from criteria that can be formulated via integral constraints on the positive time axis. In the literature, such integral criteria are sometimes also called bounds on the transient behavior; see e.g., [9] where interesting results are obtained for this case.
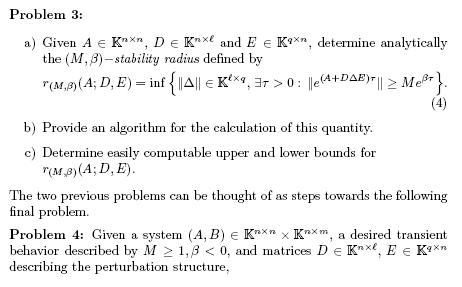
Stability radii with respect to asymptotic stability of linear systems were introduced in [5] and there is a considerable body of literature investigating this problem. The questions posed in this note are an extension of the available theory insofar as the transient behavior is neglected in most of the available results on stability radii.
3 AVAILABLE RESULTS
A number of results are available for problem 1. Estimates of the transient behavior involving either quadratic Lyapunov functions or resolvent inequalities are known but can be quite conservative or intractable. Moreover, for many of the available estimates, little is known on their conservatism.

BIBLIOGRAPHY
[1] J. S. Baggett and L. N. Trefethen, “Low-dimensional Models of Subcrit-ical Transition to Turbulence’” Physics of Fluids 9:1043–1053, 1997.
[2] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix Inequalities in Systems and Control Theory, volume 15 of Studies in Applied Mathematics, SIAM, Philadelphia, 1994.
[3] T. Braconnier and F. Chaitin-Chatelin, “Roundoff induces a chaotic behavior for eigensolvers applied on highly nonnormal matrices, ” M.-O. Bristeau et al. (eds.), Computational Science for the 21st Century. Symposium, Tours, France, May 5–7, 1997. Chichester: John Wiley & Sons. 43-52 (1997).
[4] M. I. Gil’, Stability of Finite and Infinite Dimensional Systems, Kluwer Academic Publishers, Boston, 1998.
[5] D. Hinrichsen and A. J. Pritchard, “Stability radius for structured perturbations and the algebraic Riccati equation, ” Systems & Control Letters, 8:105–113, 1986.
[6] D. Hinrichsen, E. Plischke, and A. J. Pritchard, “Liapunov and Riccati equations for practical stability, ” In: Proc. European Control Conf. ECC- 2001, Porto, Portugal, (CD-ROM), pp. 2883–2888, 2001. (8)
[7] D. Hinrichsen, E. Plischke, and F. Wirth; “State Feedback Stabilization with Guaranteed Transient Bounds, ” In: Proceedings of MTNS-2002, Notre Dame, IN, USA, August, 2002.
[8] A. Pazy, Semigroups of Linear Operators and Applications to Partial Differential Equations, Springer-Verlag, New York, 1983.
[9] A. Saberi, A. A. Stoorvogel, and P. Sannuti, Control of Linear Systems with Regulation and Input Constraints, Springer-Verlag, London, 2000.
[10] L. N. Trefethen, “Pseudospectra of linear operators, ” SIAM Review, 39(3):383–406, 1997.
[11] K. Veselić, “Bounds for exponentially stable semigroups, ” Lin. Alg. Appl., 358:195–217, 2003.