
Problem 7.3
Three problems in the field of
observability
Philippe Jouan
Laboratoire R. Salem
CNRS UMR 6085
Université de Rouen
Mathématiques, site Colbert
76821 Mont-Saint-Aignan Cedex
France
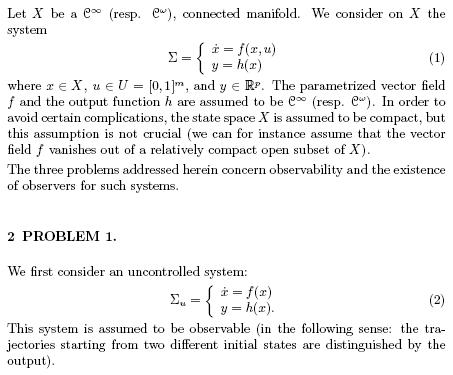
1 INTRODUCTION.

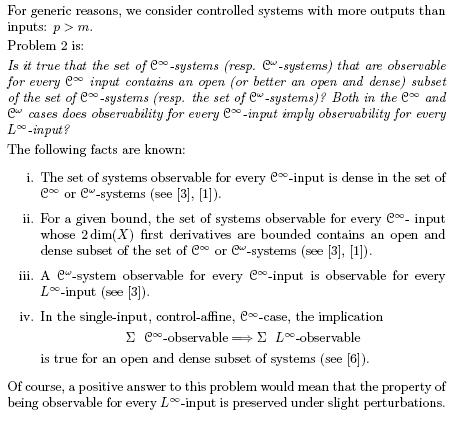
3 PROBLEM 2.
Once we know that a controlled system is observable in the weak sense of [4] (two different initial states have to be distinguished by the output for at least one input) a question arises naturally: which inputs are universal? (An input is universal if any two different initial states are distinguished by the output for this input, see [8].) An equivalent formulation is: for which inputs is the system observable?
4 PROBLEM 3.
Since the set of systems observable for every ![]() -input is residual (with more ouputs than inputs), it is very interesting to design observers for them, particularly if this
set contains an open subset.
-input is residual (with more ouputs than inputs), it is very interesting to design observers for them, particularly if this
set contains an open subset.
At the present time, the more general construction of observers for nonlinear systems is the high gain one (see [3]). But
the observers designed in this way have the default to make use of the derivatives of the input and cannot work if this last
is only ![]() . In some particular cases (linearizable systems, linearizable modulo an output injection systems, bilinear systems, uniformly
observable systems . . . ) observers that works for every input are known but they cannot be generalized.
. In some particular cases (linearizable systems, linearizable modulo an output injection systems, bilinear systems, uniformly
observable systems . . . ) observers that works for every input are known but they cannot be generalized.
Problem 3 is therefore:
For systems observable for every ![]() -input, find a general construction of an observer which works for every
-input, find a general construction of an observer which works for every ![]() -input.
-input.
Notice that if the system is “immersed” in ![]() (in a sense to make precise) the “immersion” must not depend on the input: in that case the image of the vector field f in
(in a sense to make precise) the “immersion” must not depend on the input: in that case the image of the vector field f in ![]() would depend upon the derivative of the input. In particular the mapping
would depend upon the derivative of the input. In particular the mapping

BIBLIOGRAPHY
[1] M. Balde and Ph. Jouan, “Genericity of observability of control-affine systems, ” Control Optimization and Calculus of Variations, vol. 3, 1998, 345-359.
[2] M. Fliess and I. Kupka, “A finiteness criterion for nonlinear input-output differential systems, ” SIAM J. on Control and Optimization, 21 (1983), 5, 721-728.
[3] J. P. Gauthier and I. Kupka, Deterministic Observation Theory and Applications, Cambridge University Press, 2001.
[4] R. Hermann and A. J. Krener, “Nonlinear controllability and observ-ability, ” IEEE Trans. Aut. Contro, AC-22 (1977), 728-740.
[5] Ph. Jouan and J. P. Gauthier, “Finite singularities of nonlinear systems. Output stabilization, observability and observers, ” Journal of Dynamical and Control Systems, vol.2, no 2, 1996, 255-288.
[6] Ph. Jouan, “![]() and
and ![]() observability of single-input
observability of single-input ![]() -Systems, ” Journal of Dynamical and Control Systems, vol. 7, no 2, 2001, 151-169.
-Systems, ” Journal of Dynamical and Control Systems, vol. 7, no 2, 2001, 151-169.
[7] Ph. Jouan, “Immersion of nonlinear systems into linear systems modulo output injection, ” submitted to SIAM J. on Control and Optimization.
[8] H. J. Sussmann, “Single-input observability of continuous-time systems, ” Math. Syst. Theory 12 (1979), 371-393.
[9] X. Xia and M. Zeitz, “On nonlinear continuous observers, ” Int. J. Control, vol. 66, no 6, 1997, 943-954.