Problem 1.11
Riccati stability
Erik I. Verriest1
School of Electrical and Computer Engineering
Georgia Institute of Technology
Atlanta, GA, 30332-0250
USA
1 DESCRIPTION OF THE PROBLEM
Given two n×n real matrices, A and B, consider the matrix Riccati equation
![]()
Can one characterize the pairs (A, B) for which the above equation has a solution for positive definite symmetric matrices P, Q, and R?
In [8] a pair (A, B) was defined to be Riccati stable if a triple of positive definite matrices P, Q, R exists such that (1) holds.
The problem may be stated equivalently as an LMI:
Can one characterize all pairs (A, B) without invoking additional matrices, for which there exist positive definite matrices P and Q such that
![]()
2 MOTIVATION AND HISTORY OF THE PROBLEM
Equation (1) plays an important role in the stability analysis of linear time-invariant delay-differential systems. It is known [9] that the autonomous system
![]()
is asymptotically stable, for all values ![]() if the pair (A, B) is Riccati stable. Note that since (3) has to be stable for r= 0 and ,
if the pair (A, B) is Riccati stable. Note that since (3) has to be stable for r= 0 and , ![]() the matrices A + B and A have to be Hurwitz stable, i.e., has its spectrum in the open left half plane. Recall also that
a matrix C is Schur-Cohn stable, if its spectrum lies in the open unit disk.
the matrices A + B and A have to be Hurwitz stable, i.e., has its spectrum in the open left half plane. Recall also that
a matrix C is Schur-Cohn stable, if its spectrum lies in the open unit disk.
If B = 0, thus reducing the problem to a finite dimensional time-invariant system, the Riccati equation reduces to the ubiquitous Lyapunov equation,
![]()
where we have set Q + R = S. It is well known that a positive definite pair (P, S) exists if and only if A is Hurwitz. This condition is necessary and sufficient.
The above result and its equivalent LMI formulation, initiated a whole set of extensions: for multiple delays, distributed
delays, time-variant systems (with time-variant delays) [3, 5]. In addition all the above variants can further be extended
to include parameter variations (robust stability) and noise (stochastic stability). Also other types of functional differential
equations (scale delay) lead to such conditions [7]. The main idea in deriving these results is the use of the Lyapunov-Krasovskii
theory with appropriate Lya-punov functionals. The equation (1) appears also in ![]() control theory and in game theory.
control theory and in game theory.
3 AVAILABLE RESULTS
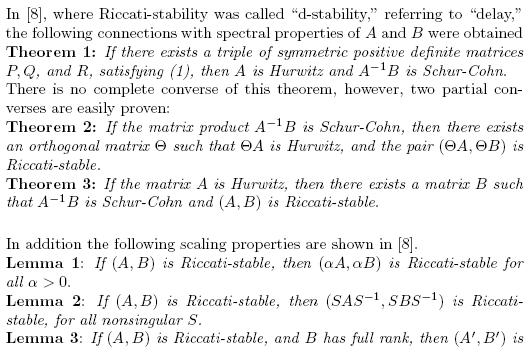
Riccati-stable.
The full rank condition on B can be relaxed. Lemma 3 is a duality result.
In [8] a detailed construction was given for a subset of Riccati-stable pairs for the case n = 2. It leads to an (over-)parameterization, but the construction readily extends to arbitrary dimensions, by using
Theorem 4: Assume that the pairs {(Ai, Bi) | i = 1 . . .N} are Riccati-stable for the same P-matrix. i.e., there exist Qi, Ri > 0, i = 1 . . .N such that

The invariance of Riccati-stability under similarity (lemma 2) ensures that if (A, B) is Riccati-stable, one can transform
the system to one for which the new P matrix, i.e., ![]() is the identity. Thus motivated, we provide a simplified form:
is the identity. Thus motivated, we provide a simplified form:
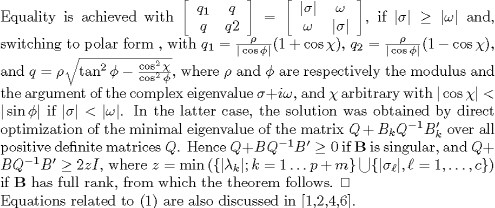
Given B, denote by AB the set of matrices A for which (A, B) is Riccati stable, with P = I, i.e.,
![]()
Hence, a necessary condition for A![]() AB is that its symmetric part As satisfies
AB is that its symmetric part As satisfies