Problem 7.4
Control of the KdV equation
Lionel Rosier
Institut Elie Cartan
Université Henri Poincare Nancy 1
B.P. 239
54506 Vandoeuvre-lès-Nancy Cedex
France
1 DESCRIPTION OF THE PROBLEM
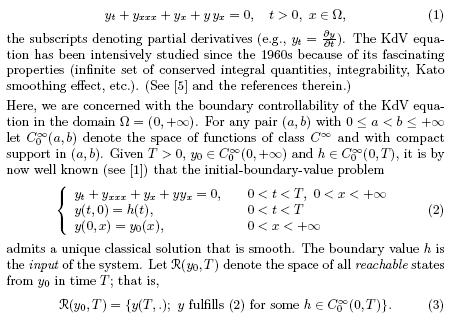
The Korteweg-de Vries (KdV) equation is the simplest model for unidirectional propagation of small amplitude long waves in nonlinear dispersive systems. It occurs in various physical contexts (e.g., water waves, plasma physics, nonlinear optics). It reads
2 MOTIVATION AND HISTORY OF THE PROBLEM
The KdV equation has been first introduced in [4] to explain the emergence of long solitary waves, the so-called “solitons.” In this context, t stands for the elapsed time, x is the independent space variable, and y = y(t, x) stands for the deviation of the fluid surface from the rest position. The above control problem may serve as a model for the control of the fluid surface in a shallow canal by means of a wavemaker. Indeed, taking Lagrangian coordinates, it is proved in [10] that the movement of the fluid surface is governed by (2), the speed of the moving boundary being roughly represented by the input h. Thus, the space R(0, T) stands for the set of waves that may be generated (from the rest position) by the wavemaker in time T.
A similar control problem is investigated in [7], but with a fluid model in which both the dispersive and nonlinear effects are neglected. In [2] the author uses the (nonlinear) shallow water equations as a fluid model to investigate the control of the fluid surface in a moving tank. These equations are appropriate in situations where the dispersive effects may be neglected, e.g., when the height of the fluid and the length of the tank are of the same order of magnitude. The shallow water equations have to be replaced by the KdV equation (or the Boussinesq system) when studying the propagation of traveling waves.
The above problem is important for the following reason. A lack of compactness, due to the fact that the domain is unbounded, prevents us from using the standard linearization procedure in the study of the controllability properties of (2). Therefore, a new approach (based on the inverse scattering?) has to be developed to investigate the (exact or approximate) controllability of the nonlinear KdV equation on the half line.
3 AVAILABLE RESULTS
The boundary controllability of the KdV equation has been investigated in numerous papers; see, e.g., [3], [8], [11] and [12].
In these papers, the domain ![]() = (0, L) is bounded and the control is applied at the right endpoint, although the waves are expected to move from the left to the right. If the
= (0, L) is bounded and the control is applied at the right endpoint, although the waves are expected to move from the left to the right. If the