
Problem 8.2
Non-iterative computation of optimal
value in Hcontrol
Ben M. Chen
Department of Electrical and Computer Engineering
National University of Singapore
Singapore 117576
Republic of Singapore
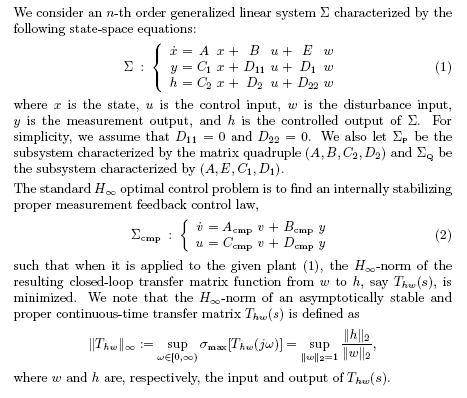
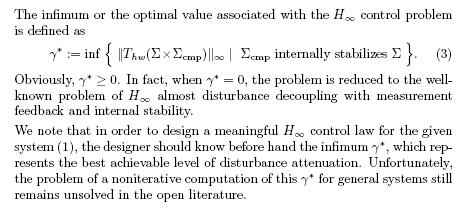
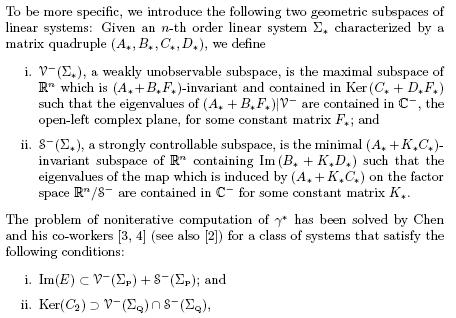
1 DESCRIPTION OF THE PROBLEM
2 MOTIVATION AND HISTORY OF THE PROBLEM
Over the last two decades, we have witnessed a proliferation of literature on ![]() optimal control since it was first introduced by Zames [20]. The main focus of the work has been on the formulation of the
problem for robust multivariable control and its solution. Since the original formulation of the
optimal control since it was first introduced by Zames [20]. The main focus of the work has been on the formulation of the
problem for robust multivariable control and its solution. Since the original formulation of the ![]() problem in Zames [20], a great deal of work has been done on finding the solution to this problem. Practically all the research
results of the early years involved a mixture of time-domain and frequency-domain techniques including the following: 1) interpolation
approach (see, e.g., [13]); chenbm2) frequency domain approach (see, e.g., [5, 8, 9]); 3) polynomial approach (see, e.g.,
[12]); and 4) J-spectral factorization approach (see, e.g., [11]). Recently, considerable attention has been focused on purely
time-domain methods based on algebraic Riccati equations (ARE) (see, e.g., [6, 7, 10, 15, 16, 17, 18, 19, 21]). Along this
line of research, connections are also made between
problem in Zames [20], a great deal of work has been done on finding the solution to this problem. Practically all the research
results of the early years involved a mixture of time-domain and frequency-domain techniques including the following: 1) interpolation
approach (see, e.g., [13]); chenbm2) frequency domain approach (see, e.g., [5, 8, 9]); 3) polynomial approach (see, e.g.,
[12]); and 4) J-spectral factorization approach (see, e.g., [11]). Recently, considerable attention has been focused on purely
time-domain methods based on algebraic Riccati equations (ARE) (see, e.g., [6, 7, 10, 15, 16, 17, 18, 19, 21]). Along this
line of research, connections are also made between ![]() optimal control and differential games (see, e.g., [1, 14]).
optimal control and differential games (see, e.g., [1, 14]).
It is noted that most of the results mentioned above are focusing on finding solutions to ![]() control problems. Many of them assume that
control problems. Many of them assume that ![]() is known or simply assume that
is known or simply assume that ![]() = 1. The computation of in the literature are usually done by certain iteration schemes. For example, in the regular case
and utilizing the results of Doyle et al. [7], an iterative procedure for approximating
= 1. The computation of in the literature are usually done by certain iteration schemes. For example, in the regular case
and utilizing the results of Doyle et al. [7], an iterative procedure for approximating ![]() would proceed as follows: one starts with a value of and determines whether
would proceed as follows: one starts with a value of and determines whether ![]() by solving two “indefinite” algebraic Riccati equations and checking the positive semi-definiteness and stabilizing properties
of these solutions. In the case when such positive semi-definite solutions exist and satisfy a coupling condition, then we
have
by solving two “indefinite” algebraic Riccati equations and checking the positive semi-definiteness and stabilizing properties
of these solutions. In the case when such positive semi-definite solutions exist and satisfy a coupling condition, then we
have ![]() and one simply repeats the above steps using a smaller value of
and one simply repeats the above steps using a smaller value of ![]() . In principle, one can approximate the infimum
. In principle, one can approximate the infimum ![]() to within any degree of accuracy in this manner. However, this search procedure is exhaustive and can be very costly. More
significantly, due to the possible high-gain occurrence as gets close to
to within any degree of accuracy in this manner. However, this search procedure is exhaustive and can be very costly. More
significantly, due to the possible high-gain occurrence as gets close to ![]() , numerical solutions for these
, numerical solutions for these ![]() AREs can become highly sensitive and ill-conditioned. This difficulty also arises in the coupling condition. Namely, as
AREs can become highly sensitive and ill-conditioned. This difficulty also arises in the coupling condition. Namely, as ![]() decreases, evaluation of the coupling condition would generally involve finding eigenvalues of stiff matrices. These numerical
difficulties are likely to be more severe for problems associated with the singular case. Thus, in general, the iterative
procedure for the computation of
decreases, evaluation of the coupling condition would generally involve finding eigenvalues of stiff matrices. These numerical
difficulties are likely to be more severe for problems associated with the singular case. Thus, in general, the iterative
procedure for the computation of ![]() based on AREs is not reliable.
based on AREs is not reliable.
3 AVAILABLE RESULTS
There are quite a few researchers who have attempted to develop procedures for the determination of the value of ![]() without iterations. For example, Petersen [15] has solved the problem for a class of one-block regular case. Scherer [17,
18] has obtained a partial answer for state feedback problem for a larger class of systems by providing a computable candidate
value together with algebraically verifiable conditions, and Chen and his co-workers [3, 4] (see also [2]) have developed
a noniterative procedures for computing the value of
without iterations. For example, Petersen [15] has solved the problem for a class of one-block regular case. Scherer [17,
18] has obtained a partial answer for state feedback problem for a larger class of systems by providing a computable candidate
value together with algebraically verifiable conditions, and Chen and his co-workers [3, 4] (see also [2]) have developed
a noniterative procedures for computing the value of ![]() for a class of systems (singular case) that satisfy certain geometric conditions.
for a class of systems (singular case) that satisfy certain geometric conditions.
together with some other minor assumptions. The work of Chen et al. involves solving a couple of algebraic Riccati and Lyapunov
equations. The computation of ![]() is then done by finding the maximum eigenvalue of a resulting constant matrix.
is then done by finding the maximum eigenvalue of a resulting constant matrix.
It has been demonstrated by an example in Chen [2] that the noniterative computation of ![]() can be done for a larger class of systems, which do not necessarily satisfy the above geometric conditions. It is believed
that there are rooms to improve the existing results.
can be done for a larger class of systems, which do not necessarily satisfy the above geometric conditions. It is believed
that there are rooms to improve the existing results.
BIBLIOGRAPHY
[1] T. Basar and P. Bernhard, ![]() Optimal Control and Related Minimax Design Problems: A Dynamic Game Approach, 2nd Ed., Birkhauser, Boston, 1995.
Optimal Control and Related Minimax Design Problems: A Dynamic Game Approach, 2nd Ed., Birkhauser, Boston, 1995.
[2] B. M. Chen, ![]() Control and Its Applications, Springer, London, 1998.
Control and Its Applications, Springer, London, 1998.
[3] B. M. Chen, Y. Guo and Z. L. Lin, “Noniterative computation of in-fimum in discrete-time ![]() -optimization and solvability conditions for the discrete-time disturbance decoupling problem, ” International Journal of
Control, vol. 65, pp. 433-454, 1996.
-optimization and solvability conditions for the discrete-time disturbance decoupling problem, ” International Journal of
Control, vol. 65, pp. 433-454, 1996.
[4] B. M. Chen, A. Saberi, and U. Ly, “Exact computation of the infi-mum in ![]() -optimization via output feedback, ” IEEE Transactions on Automatic Control, vol. 37, pp. 70-78, 1992.
-optimization via output feedback, ” IEEE Transactions on Automatic Control, vol. 37, pp. 70-78, 1992.
[5] J. C. Doyle, Lecture Notes in Advances in Multivariable Control, ONR-Honeywell Workshop, 1984.
[6] J. C. Doyle and K. Glover, “State-space formulae for all stabilizing controllers that satisfy an ![]() -norm bound and relations to risk sensitivity, ” Systems & Control Letters, vol. 11, pp. 167-172, 1988.
-norm bound and relations to risk sensitivity, ” Systems & Control Letters, vol. 11, pp. 167-172, 1988.
[7] J. Doyle, K. Glover, P. P. Khargonekar, and B. A. Francis, “State space solutions to standard H2 and ![]() control problems, ” IEEE Transactions on Automatic Control, vol. 34, pp. 831-847, 1989.
control problems, ” IEEE Transactions on Automatic Control, vol. 34, pp. 831-847, 1989.
[8] B. A. Francis, A Course in ![]() Control Theory, Lecture Notes in Control and Information Sciences, vol. 88, Springer, Berlin, 1987.
Control Theory, Lecture Notes in Control and Information Sciences, vol. 88, Springer, Berlin, 1987.
[9] K. Glover, “All optimal Hankel-norm approximations of linear multivariable systems and their ![]() error bounds, ” International Journal of Control, vol. 39, pp. 1115-1193, 1984.
error bounds, ” International Journal of Control, vol. 39, pp. 1115-1193, 1984.
[10] P. Khargonekar, I. R. Petersen, and M. A. Rotea, “![]() -optimal control with state feedback, ” IEEE Transactions on Automatic Control, vol. AC-33, pp. 786-788, 1988.
-optimal control with state feedback, ” IEEE Transactions on Automatic Control, vol. AC-33, pp. 786-788, 1988.
[11] H. Kimura, Chain Scattering Approach to ![]() Control, Birkhauser, Boston, 1997.
Control, Birkhauser, Boston, 1997.
[12] H. Kwakernaak, “A polynomial approach to minimax frequency domain optimization of multivariable feedback systems, ” International Journal of Control, vol. 41, pp. 117-156, 1986.
[13] D. J. N. Limebeer and B. D. O. Anderson, “An interpolation theory approach to ![]() controller degree bounds, ” Linear Algebra and its Applications, vol. 98, pp. 347-386, 1988.
controller degree bounds, ” Linear Algebra and its Applications, vol. 98, pp. 347-386, 1988.
[14] G. P. Papavassilopoulos and M. G. Safonov, “Robust control design via game theoretic methods, ” Proceedings of the 28th Conference on Decision and Control, Tampa, Florida, pp. 382-387, 1989.
[15] I. R. Petersen, “Disturbance attenuation and ![]() optimization: A design method based on the algebraic Riccati equation, ” IEEE Transactions on Automatic Control, vol. AC-32,
pp. 427-429, 1987.
optimization: A design method based on the algebraic Riccati equation, ” IEEE Transactions on Automatic Control, vol. AC-32,
pp. 427-429, 1987.
[16] A. Saberi, B. M. Chen, and Z. L. Lin, “Closed-form solutions to a class of ![]() optimization problem, ” International Journal of Control, vol. 60, pp. 41-70, 1994.
optimization problem, ” International Journal of Control, vol. 60, pp. 41-70, 1994.
[17] C. Scherer, “![]() control by state feedback and fast algorithm for the computation of optimal
control by state feedback and fast algorithm for the computation of optimal ![]() norms, ” IEEE Transactions on Automatic Control, vol. 35, pp. 1090-1099, 1990.
norms, ” IEEE Transactions on Automatic Control, vol. 35, pp. 1090-1099, 1990.
[18] C. Scherer, “The state-feedback ![]() problem at optimality, ” Automat-ica, vol. 30, pp. 293-305, 1994.
problem at optimality, ” Automat-ica, vol. 30, pp. 293-305, 1994.
[19] G. Tadmor, “Worst-case design in the time domain: The maximum principle and the standard ![]() problem, ” Mathematics of Control, Signals and Systems, vol. 3, pp. 301-324, 1990.
problem, ” Mathematics of Control, Signals and Systems, vol. 3, pp. 301-324, 1990.
[20] G. Zames, “Feedback and optimal sensitivity: Model reference transformations, multiplicative seminorms, and approximate inverses, ” IEEE Transactions on Automatic Control, vol. 26, pp. 301-320, 1981.
[21] K. Zhou, J. Doyle, and K. Glover, Robust and Optimal Control, Prentice Hall, New York, 1996.