
Problem 4.1
![]() -induced gains of switched linear
-induced gains of switched linear
systems
Joao P. Hespanha1
Dept. of Electrical and Computer Engineering
University of California, Santa Barbara
USA
1 SWITCHED LINEAR SYSTEMS
In the 1999 collection of Open Problems in Mathematical Systems and Control Theory, we proposed the problem of computing input-output gains of switched linear systems. Recent developments provided new insights into this problem leading to new questions.
2 PROBLEM DESCRIPTION
![]()
This means that even switching arbitrarily seldom, one may not be able to recover the ![]() -induced gains of the “unswitched systems.” In [2] a procedure was given to compute
-induced gains of the “unswitched systems.” In [2] a procedure was given to compute ![]() . Opposite to what had been conjectured,
. Opposite to what had been conjectured, ![]() is realization dependent and cannot be determined just from the transfer functions of the systems being switched.
is realization dependent and cannot be determined just from the transfer functions of the systems being switched.
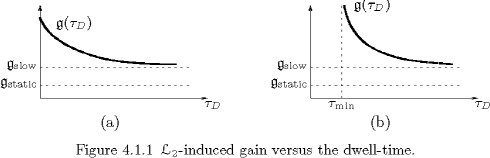
The function ![]() thus looks roughly like the ones shown in figure 4.1.1, where (a) corresponds to a set of realizations that remains stable
for arbitrarily fast switching and (b) to a set that can exhibit unstable behavior for sufficiently fast switching [3]. In
(b), the scalar
thus looks roughly like the ones shown in figure 4.1.1, where (a) corresponds to a set of realizations that remains stable
for arbitrarily fast switching and (b) to a set that can exhibit unstable behavior for sufficiently fast switching [3]. In
(b), the scalar ![]() denotes the smallest dwell-time for which instability can occur for some switching signal in
denotes the smallest dwell-time for which instability can occur for some switching signal in ![]() .
.
Several important basic questions remain open:
1. Under what conditions is ![]() bounded? This is really a stability problem whose general solution has been eluding researchers for a while now (cf., the
survey paper [3] and references therein).
bounded? This is really a stability problem whose general solution has been eluding researchers for a while now (cf., the
survey paper [3] and references therein).
2. In case ![]() is unbounded (case (b) in figure 4.1.1), how to compute the position of the vertical asymptote? Or, equivalently, what is
the smallest dwell-time
is unbounded (case (b) in figure 4.1.1), how to compute the position of the vertical asymptote? Or, equivalently, what is
the smallest dwell-time ![]() for which one can have instability?
for which one can have instability?
![]() -INDUCED GAINS OF SWITCHED LINEAR SYSTEMS
-INDUCED GAINS OF SWITCHED LINEAR SYSTEMS
3. Is ![]() a convex function? Is it smooth (or even continuous)?
a convex function? Is it smooth (or even continuous)?
Even if direct computation of ![]() proves to be difficult, answers to the previous questions may provide indirect methods to compute tight bounds for it. They
also provide a better understanding of the trade-off between switching speed and induced gain. As far as we know, currently
only very coarse upper-bounds for
proves to be difficult, answers to the previous questions may provide indirect methods to compute tight bounds for it. They
also provide a better understanding of the trade-off between switching speed and induced gain. As far as we know, currently
only very coarse upper-bounds for ![]() are available. These are obtained by computing a conservative upper-bound
are available. These are obtained by computing a conservative upper-bound ![]() for
for![]() and then an upper-bound for
and then an upper-bound for ![]() that is valid for every dwell-time larger than
that is valid for every dwell-time larger than ![]() (cf., e.g., [4, 5]). These bounds do not really address the trade-off mentioned above.
(cf., e.g., [4, 5]). These bounds do not really address the trade-off mentioned above.
BIBLIOGRAPHY
[1] J. P. Hespanha and A. S. Morse, “Input-output gains of switched linear systems, ” In: Open Problems in Mathematical Systems Theory and Control, V. D. Blondel, E. D. Sontag, M. Vidyasagar, and J. C. Willems, eds., London: Springer-Verlag, 1999.
[2] J. P. Hespanha, “Computation of root-mean-square gains of switched linear systems, ” presented at the Fifth Hybrid Systems: Computation and Control Workshop, Mar. 2002.
[3] D. Liberzon and A. S. Morse, “Basic problems in stability and design of switched systems, ” IEEE Contr. Syst. Mag., vol. 19, pp. 59–70, Oct. 1999.
[4] J. P. Hespanha and A. S. Morse, “Stability of switched systems with average dwell-time, ” In: Proc. of the 38th Conf. on Decision and Contr.
, pp. 2655–2660, Dec. 1999.
[5] G. Zhai, B. Hu, K. Yasuda, and A. N. Michel, “Disturbance attenuation properties of time-controlled switched systems, ” submitted to publication, 2001.
1This material is based upon work supported by the National Science Foundation under Grant No. ECS-0093762.