
Problem 7.1
Time for local controllability of a 1-D
tank containing a fluid modeled by the
shallow water equations
Jean-Michel Coron
Université Paris-Sud
Département de Mathematique
Bâtiment 425
91405 Orsay
France
1 DESCRIPTION OF THE PROBLEM
We consider a 1-D tank containing an inviscid incompressible irrotational fluid. The tank is subject to one-dimensional horizontal moves. We assume that the horizontal acceleration of the tank is small compared to the gravity constant and that the height of the fluid is small compared to the length of the tank. This motivates the use of the Saint-Venant equations [5] (also called shallow water equations) to describe the motion of the fluid; see, e.g.,
[2, Sec. 4.2]. After suitable scaling arguments, the length of the tank and the gravity constant can be taken to be equal to 1; see [1]. Then the dynamics equations considered are, see [3] and [1],
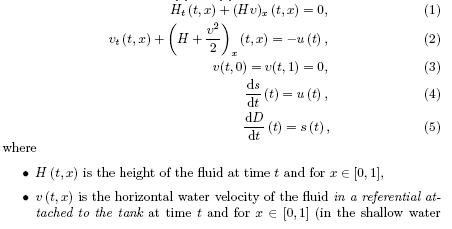
• u is the horizontal acceleration of the tank in the absolute referential,
• s is the horizontal velocity of the tank,
• D is the horizontal displacement of the tank.
This is a control system, denoted Σ, where
• the state is Y = (H, v, s, D),
• the control is ![]() .
.
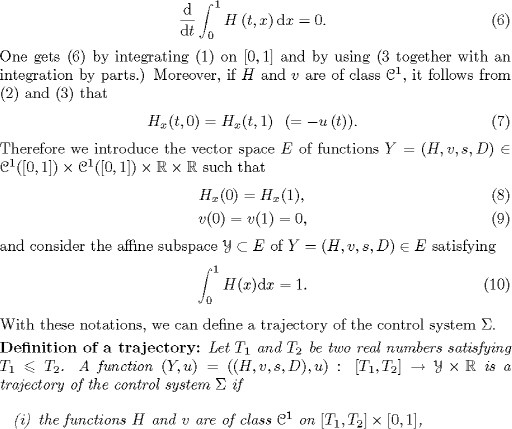
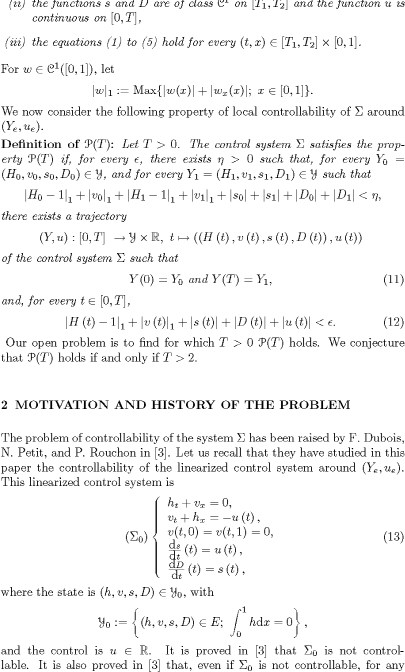
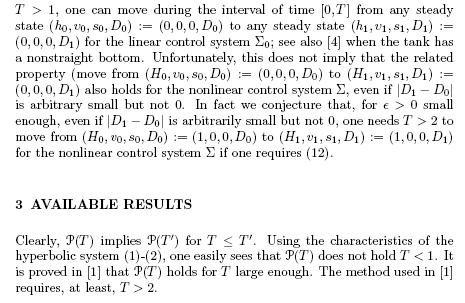
Still, by scaling arguments, we may assume that, for every steady state, H, which is then a constant function, is equal to 1; see [1]. One is interested in the local controllability of the control system Σ around the equilibrium point
![]()
Of course, the total mass of the fluid is conserved so that, for every solution of (1) to (3),
BIBLIOGRAPHY
[1] J.-M. Coron, “Local controllability of a 1-D tank containing a fluid modeled by the shallow water equations, ” reprint University Paris-Sud, 2002, accepted for publication in ESAIM: COCV.
[2] L. Debnath, Nonlinear Water Waves, Academic Press, San Diego, 1994.
[3] F. Dubois, N. Petit, and P. Rouchon, “Motion planning and nonlinear simulations for a tank containing a fluid, ” ECC 99.
[4] N. Petit and P. Rouchon, “Dynamics and solutions to some control problems for water-tank systems, ” preprint, CIT-CDS 00-004, 2000, accepted for publication in IEEE Transactions on Automatic Control.
[5] A.J.C.B. de Saint-Venant, “Théorie du mouvement non permanent des eaux, avec applications aux crues des riviéres et à l’introduction des marées dans leur lit, ” C.R. Acad. Sci. Paris, 53 pp. 147-154, 1971.