5.6 STATE SPACE MODEL FOR SINGLE AREA
Let U = ∆PC be the state created by the linear combination of all our system state variables (x). We define the state with the block diagram shown in Fig 5.10.
x1 = ∫ Δf1dt U = ΔPC.
x2 = Δf d = ΔPD
x3 = ΔPG(s)
x4 = ΔPsg (Speed governer)
From Block (1)
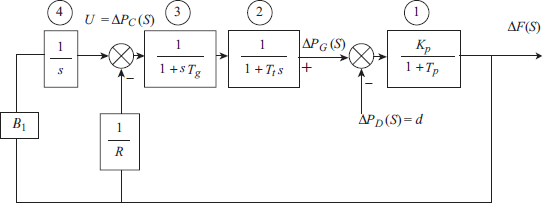
From Block (2)

From Block (3)
From Block (4)
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.