
CHAPTER 1 Vision, the Challenge
1.1 Introduction—The Senses
Of the five senses—vision, hearing, smell, taste, and touch—vision is undoubtedly the one that we have come to depend upon above all others, and indeed the one that provides most of the data we receive. Not only do the input pathways from the eyes provide megabits of information at each glance, but the data rate for continuous viewing probably exceed 10 megabits per second. However, much of this information is redundant and is compressed by the various layers of the visual cortex, so that the higher centers of the brain have to interpret abstractly only a small fraction of the data. Nonetheless, the amount of information the higher centers receive from the eyes must be at least two orders of magnitude greater than all the information they obtain from the other senses.
Another feature of the human visual system is the ease with which interpretation is carried out. We see a scene as it is—trees in a landscape, books on a desk, widgets in a factory. No obvious deductions are needed, and no overt effort is required to interpret each scene. In addition, answers are effectively immediate and are normally available within a tenth of a second. Just now and again some doubt arises—for example, a wire cube might be “seen” correctly or inside out. This and a host of other optical illusions are well known, although for the most part we can regard them as curiosities—irrelevant freaks of nature. Somewhat surprisingly, it turns out that illusions are quite important, since they reflect hidden assumptions that the brain is making in its struggle with the huge amounts of complex visual data it is receiving. We have to bypass this topic here (though it surfaces now and again in various parts of this book). However, the important point is that we are for the most part unaware of the complexities of vision. Seeing is not a simple process: it is just that vision has evolved over millions of years, and there was no particular advantage in evolution giving us any indication of the difficulties of the task. (If anything, to have done so would have cluttered our minds with worthless information and quite probably slowed our reaction times in crucial situations.)
Thus, ignorance of the process of human vision abounds. However, being by nature inventive, the human species is now trying to get machines to do much of its work. For the simplest tasks there should be no particular difficulty in mechanization, but for more complex tasks the machine must be given our prime sense, that of vision. Efforts have been made to achieve this, sometimes in modest ways, for well over 30 years. At first such tasks seemed trivial, and schemes were devised for reading, for interpreting chromosome images, and so on. But when such schemes were challenged with rigorous practical tests, the problems often turned out to be more difficult. Generally, researchers react to their discovery that apparent “trivia” are getting in the way by intensifying their efforts and applying great ingenuity. This was certainly the case with some early efforts at vision algorithm design. Hence, it soon became plain that the task is a complex one, in which numerous fundamental problems confront the researcher, and the ease with which the eye can interpret scenes has turned out to be highly deceptive.
Of course, one way in which the human visual system surpasses the machine is that the brain possesses some 1010 cells (or neurons), some of which have well over 10,000 contacts (or synapses) with other neurons. If each neuron acts as a type of microprocessor, then we have an immense computer in which all the processing elements can operate concurrently. Probably, the largest single man-made computer still contains less than 100 million processing elements, so the majority of the visual and mental processing tasks that the eye-brain system can perform in a flash have no chance of being performed by present-day man-made systems. Added to these problems of scale is the problem of how to organize such a large processing system and how to program it. Clearly, the eye-brain system is partly hard-wired by evolution, but there is also an interesting capability to program it dynamically by training during active use. This need for a large parallel processing system with the attendant complex control problems clearly illustrates that machine vision must indeed be one of the most difficult intellectual problems to tackle.
So what are the problems involved in vision that make it apparently so easy for the eye and yet so difficult for the machine? In the next few sections we attempt to answer this question.
1.2 The Nature of Vision
1.2.1 The Process of Recognition
This section illustrates the intrinsic difficulties of implementing machine vision, starting with an extremely simple example—that of character recognition. Consider the set of patterns shown in Fig. 1.1a. Each pattern can be considered as a set of 25 bits of information, together with an associated class indicating its interpretation. In each case, imagine a computer learning the patterns and their classes by rote. Then any new pattern may be classified (or “recognized”) by comparing it with this previously learned “training set,” and assigning it to the class of the nearest pattern in the training set. Clearly, test pattern (1) (Fig. 1.1b) will be allotted to class U on this basis. Chapter 24 shows that this method is a simple form of the nearest-neighbor approach to pattern recognition.
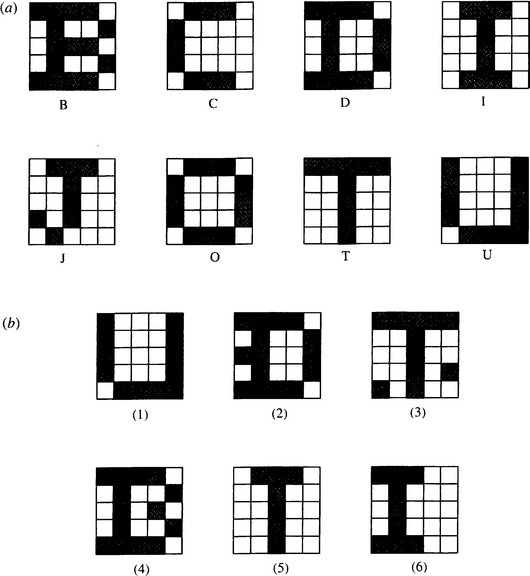
Figure 1.1 Some simple 25-bit patterns and their recognition classes used to illustrate some of the basic problems of recognition: (a) training set patterns (for which the known classes are indicated); (b) test patterns.
The scheme we have outlined in Fig. 1.1 seems straightforward and is indeed highly effective, even being able to cope with situations where distortions of the test patterns occur or where noise is present: this is illustrated by test patterns (2) and (3). However, this approach is not always foolproof. First, in some situations distortions or noise is so excessive that errors of interpretation arise. Second, patterns may not be badly distorted or subject to obvious noise and, yet, are misinterpreted: this situation seems much more serious, since it indicates an unexpected limitation of the technique rather than a reasonable result of noise or distortion. In particular, these problems arise where the test pattern is displaced or erroneously oriented relative to the appropriate training set pattern, as with test pattern (6).
As will be seen in Chapter 24, a powerful principle is operative here, indicating why the unlikely limitation we have described can arise: it is simply that there are insufficient training set patterns and that those that are present are insufficiently representative of what will arise during tests. Unfortunately, this presents a major difficulty inasmuch as providing enough training set patterns incurs a serious storage problem, and an even more serious search problem when patterns are tested. Furthermore, it is easy to see that these problems are exacerbated as patterns become larger and more real. (Obviously, the examples of Fig. 1.1 are far from having enough resolution even to display normal type fonts.) In fact, a combinatorial explosion1 takes place. Forgetting for the moment that the patterns of Fig. 1.1 have familiar shapes, let us temporarily regard them as random bit patterns. Now the number of bits in these N × N patterns is N2, and the number of possible patterns of this size is 2N: even in a case where N = 20, remembering all these patterns and their interpretations would be impossible on any practical machine, and searching systematically through them would take impracticably long (involving times of the order of the age of the universe). Thus, it is not only impracticable to consider such brute-force means of solving the recognition problem, but also it is effectively impossible theoretically. These considerations show that other means are required to tackle the problem.
1.2.2 Tackling the Recognition Problem
An obvious means of tackling the recognition problem is to normalize the images in some way. Clearly, normalizing the position and orientation of any 2-D picture object would help considerably. Indeed, this would reduce the number ofdegrees of freedom by three. Methods for achieving this involve centralizing the objects—arranging that their centroids are at the center of the normalized image—and making their major axes (deduced by moment calculations, for example) vertical or horizontal. Next, we can make use of the order that is known to be present in the image—and here it may be noted that very few patterns of real interest are indistinguishable from random dot patterns. This approach can be taken further: if patterns are to be nonrandom, isolated noise points may be eliminated. Ultimately, all these methods help by making the test pattern closer to a restricted set of training set patterns (although care has to be taken to process the training set patterns initially so that they are representative of the processed test patterns).
It is useful to consider character recognition further. Here we can make additional use of what is known about the structure of characters—namely, that they consist of limbs of roughly constant width. In that case, the width carries no useful information, so the patterns can be thinned to stick figures (called skeletons—see Chapter 6). Then, hopefully, there is an even greater chance that the test patterns will be similar to appropriate training set patterns (Fig. 1.2). This process can be regarded as another instance of reducing the number of degrees of freedom in the image, and hence of helping to minimize the combinatorial explosion—or, from a practical point of view, to minimize the size of the training set necessary for effective recognition.

Figure 1.2 Use of thinning to regularize character shapes. Here character shapes of different limb widths—or even varying limb widths—are reduced to stick figures or skeletons. Thus, irrelevant information is removed, and at the same time recognition is facilitated.
Next, consider a rather different way of looking at the problem. Recognition is necessarily a problem of discrimination—that is, of discriminating between patterns of different classes. In practice, however, considering the natural variation of patterns, including the effects of noise and distortions (or even the effects of breakages or occlusions), there is also a problem of generalizing over patterns of the same class. In practical problems a tension exists between the need to discriminate and the need to generalize. Nor is this a fixed situation. Even for the character recognition task, some classes are so close to others (n’s and h’s will be similar) that less generalization is possible than in other cases. On the other hand, extreme forms of generalization arise when, for example, an A is to be recognized as an A whether it is a capital or small letter, or in italic, bold, or other form of font—even if it is handwritten. The variability is determined largely by the training set initially provided. What we emphasize here, however, is that generalization is as necessary a prerequisite to successful recognition as is discrimination.
At this point it is worth giving more careful consideration to the means whereby generalization was achieved in the examples cited above. First, objects were positioned and orientated appropriately; second, they were cleaned of noise spots; and third, they were thinned to skeleton figures (although the last-named process is relevant only for certain tasks such as character recognition). In the third case we are generalizing over characters drawn with all possible limb widths, width being an irrelevant degree of freedom for this type of recognition task. Note that we could have generalized the characters further by normalizing their size and saving another degree of freedom. The common feature of all these processes is that they aim to give the characters a high level of standardization against known types of variability before finally attempting to recognize them.
The standardization (or generalization) processes we have outlined are all realized by image processing, that is, the conversion of one image into another by suitable means. The result is a two-stage recognition scheme: first, images are converted into more amenable forms containing the same numbers of bits of data; and second, they are classified, with the result that their data content is reduced to very few bits (Fig. 1.3). In fact, recognition is a process of data abstraction, the final data being abstract and totally unlike the original data. Thus we must imagine a letter A starting as an array of perhaps 20 × 20 bits arranged in the form of an A and then ending as the 7 bits in an ASCII representation of an A, namely, 1000001 (which is essentially a random bit pattern bearing no resemblance to an A).
Figure 1.3 The two-stage recognition paradigm: C, input from camera; G, grab image (digitize and store); P, preprocess; R, recognize (i, image data; a, abstract data). The classical paradigm for object recognition is that of (i) preprocessing (image processing) to suppress noise or other artifacts and to regularize the image data, and (ii) applying a process of abstract (often statistical) pattern recognition to extract the very few bits required to classify the object.
The last paragraph reflects to a large extent the history of image analysis. Early on, a good proportion of the image analysis problems being tackled was envisaged as consisting of an image “preprocessing task carried out by image processing techniques, followed by a recognition task undertaken by statistical pattern recognition methods (Chapter 24). These two topics—image processing and statistical pattern recognition—consumed much research effort and effectively dominated the subject of image analysis, whereas other approaches such as the Hough transform were not given enough recognition and as a result were not researched adequately. One aim of this book is to ensure that such “intermediate-level processing techniques are given due emphasis and attention, and that the best range of techniques is applied to any machine vision task.
1.2.3 Object Location
The problem tackled in the preceding section—that of character recognition—is a highly constrained one. In many practical applications, it is necessary to search pictures for objects of various types rather than just interpreting a small area of a picture.
The search task can involve prodigious amounts of computation and is also subject to a combinatorial explosion. Imagine the task of searching for a letter E in a page of text. An obvious way of conducting this search is to move a suitable “template” of size n × n over the whole image, of size N × N, and to find where a match occurs (Fig. 1.4). A match can be defined as a position where there is exact agreement between the template and the local portion of the image, but, in keeping with the ideas of Section 1.2.1, it will evidently be more relevant to look for a best local match (i.e., a position where the match is locally better than in adjacent regions) and where the match is also good in some more absolute sense, indicating that an E is present.
Figure 1.4 Template matching, the process of moving a suitable template over an image to determine the precise positions at which a match occurs—hence revealing the presence of objects of a particular type.
One of the most natural ways of checking for a match is to measure the Hamming distance between the template and the local n × n region of the image, that is, to sum the number of differences between corresponding bits. This is essentially the process described in Section 1.2.1. Then places with a low Hamming distance are places where the match is good. These template matching ideas can be extended to cases where the corresponding bit positions in the template and the image do not just have binary values but may have intensity values over a range 0 to 255. In that case, the sums obtained are no longer Hamming distances but may be generalized to the form:
where Itis the local template value, Ii is the local image value, and the sum is taken over the area of the template. This makes template matching practicable in many situations; the possibilities are examined in more detail in subsequent chapters.
We referred earlier to a combinatorial explosion in this search problem too. The reason this arises is as follows. First, when a 5 × 5 template is moved over an N × Nimage in order to look for a match, the number of operations required is of the order of 52N2, totaling some 1 million operations for a 256 × 256 image. The problem is that when larger objects are being sought in an image, the number of operations increases in proportion to the square of the size of the object, the total number of operations being N2n2when ann × n template is used.2 For a 30 × 30 template and a 256 × 256 image, the number of operations required rises to some 60 million. The time it takes to achieve this on any conventional computer will be many seconds—well away from the requirements of real-time3 operation.
Next, recall that, in general, objects may appear in many orientations in an image (E’s on a printed page are exceptional). If we imagine a possible 360 orientations (i.e., one per degree of rotation), then a corresponding number of templates will in principle have to be applied in order to locate the object. This additional degree of freedom pushes the search effort and time to enormous levels, so far away from the possibility of real-time implementation that new approaches must be found for tackling the task. Fortunately, many researchers have applied their minds to this problem, and as a result we now have many ideas for tackling it. Perhaps the most important general means of saving effort on this sort of scale is that of two-stage (or multistage) template matching. The principle is to search for objects via their features. For example, we might consider searching for E’s by looking for characters that have horizontal line segments within them. Similarly, we might search for hinges on a manufacturer’s conveyor by looking first for the screw holes they possess. In general, it is useful to look for small features, since they require smaller templates and hence involve significantly less computation, as we have demonstrated. This means that it may be better to search for E’s by looking for corners instead of horizontal line segments.
Unfortunately, noise and distortions give rise to problems if we search for objects via small features; there is even a risk of missing the object altogether. Hence, it is necessary to collate the information from a number of such features. This is the point where the many available methods start to differ from each other. How many features should be collated? Is it better to take a few larger features than a lot of smaller ones? And so on. Also, we have not fully answered the question of what types of features are the best to employ. These and other questions are considered in the following chapters.
Indeed, in a sense, these questions are the subject of this book. Search is one of the fundamental problems of vision, yet the details and the application of the basic idea of two-stage template matching give the subject much of its richness: to solve the recognition problem the dataset needs to be explored carefully. Clearly, any answers will tend to be data-dependent, but it is worth exploring to what extent generalized solutions to the problem are possible.
1.2.4 Scene Analysis
The preceding subsection considered what is involved in searching an image for objects of a certain type. The result of such a search is likely to be a list of centroid coordinates for these objects, although an accompanying list of orientations might also be obtained. The present subsection considers what is involved in scene analysis—the activity we are continually engaged in as we walk around, negotiating obstacles, finding food, and so on. Scenes contain a multitude of objects, and it is their interrelationships and relative positions that matter as much as identifying what they are. There is often no need for a search per se, and we could in principle passively take in what is in the scene. However, there is much evidence (e.g., from analysis of eye movements) that the eye-brain system interprets scenes by continually asking questions about what is there. For example, we might ask the following questions: Is this a lamppost? How far away is it? Do I know this person? Is it safe to cross the road? And so on. Our purpose here is not to dwell on these human activities or to indulge in long introspection about them but merely to observe that scene analysis involves enormous amounts of input data, complex relationships between objects within scenes, and, ultimately, descriptions of these complex relationships. The latter no longer take the form of simple classification labels, or lists of object coordinates, but have a much richer information content. Indeed, a scene will, to a first approximation, be better described in English than as a list of numbers. It seems likely that a much greater combinatorial explosion is involved in determining relationships between objects than in merely identifying and locating them. Hence all sorts of props must be used to aid visual interpretation: there is considerable evidence of this in the human visual system, where contextual information and the availability of immense databases of possibilities clearly help the eye to a very marked degree.
Note also that scene descriptions may initially be at the level of factual content but will eventually be at a deeper level—that of meaning, significance, and relevance. However, we shall not be able to delve further into these areas in this book.
1.2.5 Vision as Inverse Graphics
It has often been said that vision is “merely inverse graphics. There is a certain amount of truth in this statement. Computer graphics is the generation of images by computer, starting from abstract descriptions of scenes and knowledge of the laws of image formation. Clearly, it is difficult to quarrel with the idea that vision is the process of obtaining descriptions of sets of objects, starting from sets of images and knowledge of the laws of image formation. (Indeed, it is good to see a definition that explicitly brings in the need to know the laws of image formation, since it is all too easy to forget that this is a prerequisite when building descriptions incorporating heuristics that aid interpretation.)
This similarity in formulation of the two processes, however, hides some fundamental points. First, graphics is a “feedforward activity; that is, images can be produced in a straightforward fashion once sufficient specification about the viewpoint and the objects, and knowledge of the laws of image formation, has been obtained. True, considerable computation may be required, but the process is entirely determined and predictable. The situation is not so straightforward for vision because search is involved and there is an accompanying combinatorial explosion. Indeed, certain vision packages incorporate graphics or CAD (computer-aided design) packages (Tabandeh and Fallside, 1986) which are inserted into feedback loops for interpretation. The graphics package is then guided iteratively until it produces an acceptable approximation to the input image, when its input parameters embody the correct interpretation. (There is a close parallel here with the problem of designing analog-to-digital converters by making use of digital-to-analog converters). Hence it seems inescapable that vision is intrinsically more complex than graphics.
We can clarify the situation somewhat by noting that, as a scene is observed, a 3-D environment is compressed into a 2-D image and a considerable amount of depth and other information is lost. This can lead to ambiguity of interpretation of the image (both a helix viewed end-on and a circle project into a circle), so the 3-D to 2-D transformation is many-to-one. Conversely, the interpretation must be one-to-many, meaning that many interpretations are possible, yet we know that only one can be correct. Vision involves not merely providing a list of all possible interpretations but providing the most likely one. Some additional rules or constraints must therefore be involved in order to determine the single most likely interpretation. Graphics, in contrast, does not have these problems, for it has been shown to be a many-to-one process.
1.3 From Automated Visual Inspection to Surveillance
So far we have considered the nature of vision but not the possible uses of man-made vision systems. There is in fact a great variety of applications for artificial vision systems—including, of course, all of those for which we employ our visual senses. Of particular interest in this book are surveillance, automated inspection, robot assembly, vehicle guidance, traffic monitoring and control, biometric measurement, and analysis of remotely sensed images. By way of example, fingerprint analysis and recognition have long been important applications of computer vision, as have the counting of red blood cells, signature verification and character recognition, and aeroplane identification (both from aerial silhouettes and from ground surveillance pictures taken from satellites). Face recognition and even iris recognition have become practical possibilities, and vehicle guidance by vision will in principle soon be sufficiently reliable for urban use.4 However, among the main applications of vision considered in this book are those of manufacturing industry—particularly, automated visual inspection and vision for automated assembly.
In the last two cases, much the same manufactured components are viewed by cameras: the difference lies in how the resulting information is used. In assembly, components must be located and oriented so that a robot can pick them up and assemble them. For example, the various parts of a motor or brake system need to be taken in turn and put into the correct positions, or a coil may have to be mounted on a TV tube, an integrated circuit placed on a printed circuit board, or a chocolate placed into a box. In inspection, objects may pass the inspection station on a moving conveyor at rates typically between 10 and 30 items per second, and it has to be ascertained whether they have any defects. If any defects are detected, the offending parts will usually have to be rejected: that is the feedforward solution. In addition, a feedback solution may be instigated—that is, some parameter may have to be adjusted to control plant further back down the production line. (This is especially true for parameters that control dimensional characteristics such as product diameter.) Inspection also has the potential for amassing a wealth of information, useful for management, on the state of the parts coming down the line: the total number of products per day, the number of defective products per day, the distribution of sizes of products, and so on. The important feature of artificial vision is that it is tireless and that all products can be scrutinized and measured. Thus, quality control can be maintained to a very high standard. In automated assembly, too, a considerable amount of on-the-spot inspection can be performed, which may help to avoid the problem of complex assemblies being rejected, or having to be subjected to expensive repairs, because (for example) a proportion of screws were threadless and could not be inserted properly.
An important feature of most industrial tasks is that they take place in real time: if applied, machine vision must be able to keep up with the manufacturing process. For assembly, this may not be too exacting a problem, since a robot may not be able to pick up and place more than one item per second—leaving the vision system a similar time to do its processing. For inspection, this supposition is rarely valid: even a single automated line (for example, one for stoppering bottles) is able to keep up a rate of 10 items per second (and, of course, parallel lines are able to keep up much higher rates). Hence, visual inspection tends to press computer hardware very hard. Note in addition that many manufacturing processes operate under severe financial constraints, so that it is not possible to employ expensive multiprocessing systems or supercomputers. Great care must therefore be taken in the design of hardware accelerators for inspection applications. Chapter 28 aims to give some insight into these hardware problems.
Finally, we return to our initial discussion about the huge variety of applications of machine vision—and it is interesting to note that, in a sense, surveillance tasks are the outdoor analogs of automated inspection. They have recently been acquiring close to exponentially increasing application; as a result, they have been included in this volume, not as an afterthought but as an expanding area wherein the techniques used for inspection have acquired a new injection of vitality. Note, however, that in the process they have taken in whole branches of new subject matter, such as motion analysis and perspective invariants (see Part 3). It is also interesting that such techniques add a new richness to such old topics as face recognition (Section 24.12.1).
1.4 What This Book Is About
The foregoing sections have examined the nature of machine vision and have briefly considered its applications and implementation. Clearly, implementing machine vision involves considerable practical difficulties, but, more important, these practical difficulties embody substantial fundamental problems, including various mechanisms giving rise to excessive processing load and time. With ingenuity and care practical problems may be overcome. However, by definition, truly fundamental problems cannot be overcome by any means—the best that we can hope for is that they be minimized following a complete understanding of their nature.
Understanding is thus a cornerstone for success in machine vision. It is often difficult to achieve, since the dataset (i.e., all pictures that could reasonably be expected to arise) is highly variegated. Much investigation is required to determine the nature of a given dataset, including not only the objects being observed but also the noise levels, and degrees of occlusion, breakage, defect, and distortion that are to be expected, and the quality and nature of lighting schemes. Ultimately, sufficient knowledge might be obtained in a useful set of cases so that a good understanding of the milieu can be attained. Then it remains to compare and contrast the various methods of image analysis that are available. Some methods will turn out to be quite unsatisfactory for reasons of robustness, accuracy or cost of implementation, or other relevant variables: and who is to say in advance what a relevant set of variables is? This, too, needs to be ascertained and defined. Finally, among the methods that could reasonably be used, there will be competition: tradeoffs between parameters such as accuracy, speed, robustness, and cost will have to be worked out first theoretically and then in numerical detail to find an optimal solution. This is a complex and long process in a situation where workers have usually aimed to find solutions for their own particular (often short-term) needs. Clearly, there is a need to raise practical machine vision from an art to a science. Fortunately, this process has been developing for some years, and it is one of the aims of this book to throw additional light on the problem.
Before proceeding further, we need to fit one or two more pieces into the jigsaw. First, there is an important guiding principle: if the eye can do it, so can the machine. Thus, if an object is fairly well hidden in an image, but the eye can still see it, then it should be possible to devise a vision algorithm that can also find it. Next, although we can expect to meet this challenge, should we set our sights even higher and aim to devise algorithms that can beat the eye? There seems no reason to suppose that the eye is the ultimate vision machine: it has been built through the vagaries of evolution, so it may be well adapted for finding berries or nuts, or for recognizing faces, but ill-suited for certain other tasks. One such task is that of measurement. The eye probably does not need to measure the sizes of objects, at a glance, to better than a few percent accuracy. However, it could be distinctly useful if the robot eye could achieve remote size measurement, at a glance, and with an accuracy of say 0.001%. Clearly, it is worth noting that the robot eye will have some capabilities superior to those of biological systems. Again, this book aims to point out such possibilities where they exist.
Machine vision is the study of methods and techniques whereby artificial vision systems can be constructed and usefully employed in practical applications. As such, it embraces both the science and engineering of vision.
Finally, it is good to have a working definition of machine vision (see box).5 Its study includes not only the software but also the hardware environment and image acquisition techniques needed to apply it. As such, it differs from computer vision, which appears from most books on the subject to be the realm of the possible design of the software, without too much attention on what goes into an integrated vision system (though modern books on computer vision usually say a fair amount about the “nasty realities” of vision, such as noise elimination and occlusion analysis).
1.5 The Following Chapters
On the whole the early chapters of the book (Chapter 2 Chapter 4) cover rather simple concepts, such as the nature of image processing, how image processing algorithms may be devised, and the restrictions on intensity thresholding techniques. The next four chapters (Chapter 5 Chapter 8) discuss edge detection and some fairly traditional binary image analysis techniques. Then, Chapter 9 Chapter 15 move on to intermediate-level processing, which has developed significantly in the past two decades, particularly in the use of transform techniques to deduce the presence of objects. Intermediate-level processing is important in leading to the inference of complex objects, both in 2-D (Chapter 15) and in 3-D (Chapter 16). It also enables automated inspection to be undertaken efficiently (Chapter 22). Chapter 24 expands on the process of recognition that is fundamental to many inspection and other processes—as outlined earlier in this chapter. Chapters 27 and 28, respectively, outline the enabling technologies of image acquisition and vision hardware design, and, finally, Chapter 29 reiterates and highlights some of the lessons and topics covered earlier in the book.
To help give the reader more perspective on the 29 chapters, the main text has been divided into five parts: Part 1 (Chapters 2 Chapter 8) is entitled Low-Level Vision, Part 2 (Chapter 9 Chapter 15) Intermediate-Level Vision, Part 3 (Chapter 16 Chapter 21) 3-D Vision and Motion, Part 4 (Chapter 22 Chapter 28) Toward Real-Time Pattern Recognition Systems, and Part 5 (Chapter 29) Perspectives on Vision. The heading Toward Real-Time Pattern Recognition Systems is used to emphasize real-world applications with immutable data flow rates, and the need to integrate all the necessary recognition processes into reliable working systems. The purpose of Part 5 is to obtain a final analytic view of the topics already encountered.
Although the sequence of chapters follows the somewhat logical order just described, the ideas outlined in the previous section—understanding of the visual process, constraints imposed by realities such as noise and occlusion, tradeoffs between relevant parameters, and so on—are mixed into the text at relevant junctures, as they reflect all-pervasive issues.
Finally, many other topics would ideally have been included in the book, yet space did not permit it. The chapter bibliographies, the main list of references, and the indexes are intended to compensate in some measure for some of these deficiencies.
1.6 Bibliographical Notes
This chapter introduces the reader to some of the problems of machine vision, showing the intrinsic difficulties but not at this stage getting into details. For detailed references, the reader should consult the later chapters. Meanwhile, some background on the world of pattern recognition can be obtained from Duda et al. (2001). In addition, some insight into human vision can be obtained from the fascinating monograph by Hubel (1995).
1 This is normally taken to mean that one or more parameters produce fast-varying (often exponential) effects that “explode” as the parameters increase by modest amounts.
2 Note that, in general, a template will be larger than the object it is used to search for, because some background will have to be included to help demarcate the object.
3 A commonly used phrase meaning that the information has to be processed as it becomes available. This contrasts with the many situations (such as the processing of images from space probes) where the information may be stored and processed at leisure.
4 Whether the public will accept this, with all its legal implications, is another matter, although it is worth noting that radar blind-landing aids for aircraft have been in wide use for some years. As discussed further in Chapter 18, last-minute automatic action to prevent accidents is a good compromise.
5 Interestingly, this definition is much broader than that of Batchelor (2003) who relates the subject to manufacturing in general and inspection and assembly in particular.