Laplace and z transforms
15.1 Introduction
In this chapter, we will present a quick review of Laplace transform methods for continuous and piecewise continuous systems and z transform methods for discrete systems. The widespread application of these methods means that engineers need increasingly to be able to apply these techniques in multitudes of situations.
Laplace transforms are used to reduce a differential equation to a simple equation in s -space and a system of differential equations to a system of linear equations. We discover that in the case of zero initial conditions, we can solve the system by multiplying the Laplace transform of the input function by the transfer function of the system. Furthermore, if we are only interested in the steady state response, and we have a periodic input, we can find the response by simply adding the response to each of the frequency components of the input signal. In Chapter 16, we therefore look at finding the frequency components of a periodic function by finding its Fourier series.
Similar ideas apply to z transform methods applied to difference equations representing discrete systems.
The system transfer function is the Laplace transform of the impulse response function of the system. The impulse response is its response to an impulse function also called a delta function. Inputting an impulse function can be though of as something like giving the system a short kick to see what happens next. The impulse function is an idealized kick, as it lasts for no time at all and has energy of exactly 1. Because of these requirements, we find that the delta function is not a function at all, in the sense that we defined functions in Chapter 1. We find that it is the most famous example of a generalized function.
15.2 The Laplace transform – definition
The Laplace transform F(s) of the function f(t) defined for t > 0 is
F(s)?=?∫∞0e−st?f(t)dt.
![]()
The Laplace transform is a function of s where s is a complex variable. Because the integral definition of the Laplace transform involves an integral to∞ it is usually necessary to limit possible values of s so that the integral converges (i.e. does not tend to ∞). Also, for many functions the Laplace transform does not exist at all.
L![]() { } is the symbolic representation of the process of taking a Laplace transform (LT). Therefore,
{ } is the symbolic representation of the process of taking a Laplace transform (LT). Therefore,
L{f(t)}?=?F(s).
![]()
Example 15.1
Find from the definition L![]() {e3t}.
{e3t}.
Solution
L{e3t}?=?∫∞0e3t?e−st?dt?=?∫∞0e(3−s)t?dt?=?[e(3−s)t3−s]∞0.

Now e(3—s)t →0 as t →∞ only if the real part of (3 — s) is negative, that is, Re(s) > 3. Then the upper limit of the integration gives 0. Hence
L{e3t}?=?1s?−?3
![]()
where Re{s} > 3.
Example 15.2
Find, from the definition, L![]() {cos(at)}.
{cos(at)}.
Solution We need to find the integral
I?=?∫∞0e−st?cos(at)dt.
![]()
We employ integration by parts twice until we find an expression that involves the original integral, I. We are then able to express I in terms of a and s.
Integrating by parts, using the formula ∫ u dv = uv – ∫ v du, where u =cos(at), dv =e−st dt, du =−a sin(at) dt and v =e−st I(−s), gives
I?=?[−e−stscos(at)]∞0?−?∫∞0e−sts?a?sin(at)dt.

The expression [e−st cos(at)]∞ only has a finite value if e−st→ 0 as t →∞. This will only be so if Re(s) > 0. With that proviso we get
I?=?1s?−?as?∫∞0?e−st?sin(at)dt.

integrating the remaining integral on the right-hand side, again by parts, where this time u = sin(at), dv = e−st dt, du = a cos(at) dt, v = e−st /(–s). gives
I?=?1s?−[−as2?e−st?sin(at)]∞0?−a2s2?∫∞0e−st?cos(at)dt=?1s?−?a2s2?∫∞0?e−st?cos(at)dt.
We see that the remaining integral is the integral we first started with, which we called I. Hence
I?=?1s?−?a2s2I

and solving this for I gives
I(1?+?a2s2)?=?1/s,?I?=?ss2?+?a2.
So we have that
L{cos(at)}?=?ss2?+?a2,?where?Re(s)?>?0.
![]()
15.3 The unit step function and the (impulse) delta function
The unit step function and delta function are very useful in systems theory.
The unit step function
The unit step function is defined as follows:
u(t)?=?{1t≥00t<0

and its graph is as shown in Figure 15.1.

The function is used to represent an idealized switch. It switches on at time t =0. If it is multiplied by any other function then it acts to switch that function on at t =0. That is, the function
f(t)u(t)?=?{0t<0f(t)t≥0.
![]()
An example for f(t) = t2is given in Figure 15.2.
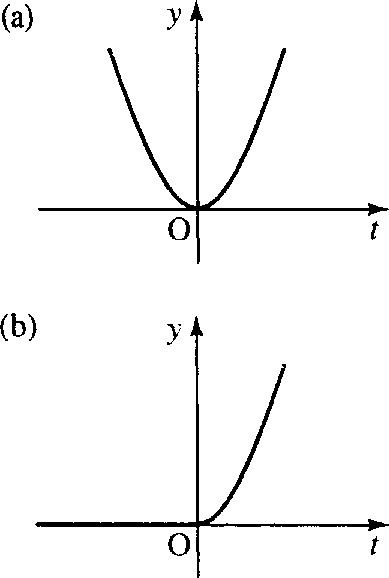
As the Laplace transform only involves the integral from t =0, all functions can be thought of as multiplied by the unit step function because f(t) =f(t)u(t) as long as t > 0.
Shifting the unit step function
As we saw in Chapter 2, the graph of f (t – a) can be found by taking the graph of f(t) and moving it a units to the right. There is an example of a shifted unit step function in Figure 15.3.

Notice that the unit step function ‘switches on’ where the argument of u is zero. Multiplying any function by the shifted unit step function changes where it is switched on. That is
f(t)u(t?−?a)?=?{0t<af(t)t≥a.
![]()
The example of sin(t)u(t −1) is shown in Figure 15.4.
The delta function
The impulse function, or delta function, is a mathematical representation of a kick. It is an idealized kick that lasts for no time at all and has energy of exactly 1.
The delta function, δ(t), is an example of a generalized function. A generalized function can be defined in terms of a sequence of functions. One way of defining it is as the limit of a rectangular pulse function, with area 1, as it halves in width and doubles in height. This sequence of functions is shown in Figure 15.5. Although the height of the pulse is tending to infinity, the area of the pulse remains 1.
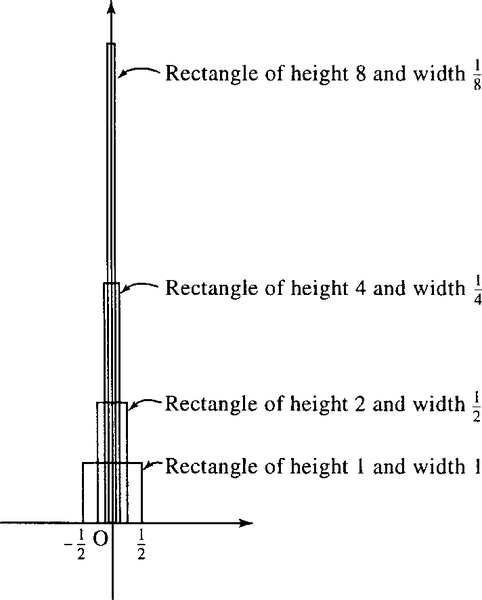
Two important properties of the delta function are
2. ∫∞−∞δ(t)?=?1.![]()
The second property expresses the fact that the area enclosed by the delta function is 1.
The unit step function, u(t), has no derivative at t = 0. Because of the sharp edges present in its graph and its jump discontinuity it is impossible to define a single tangent at that point. However, if we also consider the unit step function as a generalized function (by taking the limit of nice smooth, continuous curves as they approach the shape of the unit step function), we are able to define its derivative, which turns out to be the delta function. This gives the third definition
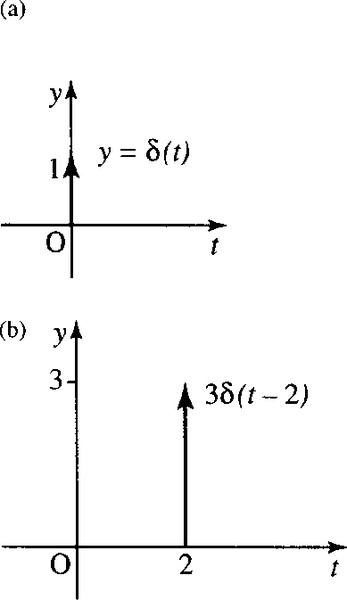
Symbolic representation of δ (t)
δ(t) can be represented on a graph by an arrow of height 1. The height represents the weight of the delta function. A shifted delta function, δ(t – a), is represented by an arrow at t = a. Examples are given in Figure 15.6.
15.4 Laplace transforms of simple functions and properties of the transform
Rather than finding a Laplace transform from the definition we usually use tables of Laplace transforms. A list of some common Laplace transforms is given in Table 15.1. We can then use the properties of the transform to find Laplace transforms of many other functions. To find the inverse transform, represented by L−1![]() { } we use the same table backwards. That is, look for the function of s on the right-hand column; the left-hand column then gives its inverse:
{ } we use the same table backwards. That is, look for the function of s on the right-hand column; the left-hand column then gives its inverse:
F(s)?=?∫∞0f(t)e−stdtF(t)?=?L−1{F(s)}.
![]()
Table 15.1
Common Laplace transforms
| f(t) | F(s) = £{f(t)} | |
| u(t) | 1/s | Re(s) > 0 |
| δ(t) | 1 | Re(s) > 0 |
| tn−1(n−1)! | 1sn | Re(s) > 0 |
| e−at | 1s+a | Re(s) > −a |
| 1asin(at) | 1s2+a2 | Re(s) > 0 |
| cos(at) | ss2+a2 | Re(s) > 0 |
| 1asinh(at) | 1s2−a2 | Re(s) > |a| |
| cosh(at) | ss2−a2 | Re(s) > |a| |

Properties of the Laplace transform
In all of the following, F(s) = ![]() {f(t)}
{f(t)}
L{af1(t)?+?bf2(t)}?=?aF1(s)?+?F2(s)
![]()
where a and b are constants.
2. First translation (or Shift rule):
L{eat?f(t)}?=?F(s?−?a)
![]()
3. Second translation:
L{f(t−a)u(t−a)}?=?e−asF(s).
![]()
L{f(at)}=1aFsa.
![]()
5. Laplace transforms of derivatives:
L{f′(t)}=sF(s)−f(0)L{f″(t)}=s2F(s)−sf(0)−f′(0)

and
L{f(n)(t)}?=?snF(s)?−?sn−1f(0)?−?…−sf(n−2)(0)?−?f(n−1)(0)
![]()
6. Integrals:
L{∫t0f(τ)dτ}?=?F(s)s.

7. Convolution:
L{f?*?g}?=?L?{∫t0f(τ)g(t−τ)dτ}?=?F(s)G(s).

8. Derivatives of the transform:
L{tnf(t)}?=?(−1)nF(n)(s)
![]()
where
Fn(s)?=?dnF(n)dsn(s).
Example 15.3
(Linearity) Find L![]() {3t2+ sin(2t)}.
{3t2+ sin(2t)}.
Solution From Table 15.1
L{t22}?=?1s3
![]()
and
L{sin(2t)2}?=?1(s2+4).

Therefore
L{3t2?+?sin(2t)}?=?6L{t22}?+?2L{sin(2t)2}?=?6s3?+?2s2+4

using
L{af1(t)?+?bf2(t)}?=?aF1(s)?+?bF2(s).
![]()
Example 15.4
(Linearity and the inverse transform) Find
L−1{2s+4?+?4ss2+9}
Solution From Table 15.1
L−1{1s+4}=e−4t

and
L−1{ss2+9}=cos(3t)
Therefore
L−1{2s+4+4ss2+9}=2e−4t+4cos(3t)

Example 15.5
(First translation) Find L![]() {t2e−3t}.
{t2e−3t}.
Solution As
L{t2}=2s3
![]()
using
L{e−atf(t)}=F(s−a).
![]()
Then multiplying by e−3t in the t domain will shift the function F (s) by 3:
L{t2e−3t}=2(s+3)2
Example 15.6
(First translation – inverse transform) Find
L−1{s+2(s+2)2+9}.
![]()
Solution As
L−1{ss2+9}=cos(3t)
![]()
and as
s+2(s+2)2+9
![]()
is s / (s2 + 9) translated by 2, using the first translation rule this will multiply in the t domain by e −2t so
L−1{s+2(s+2)2+9}=cos(3t)e−2t
![]()
Example 15.7
(Second translation) Find the Laplace transform of
f(t)={0t<23sin(3t−2)t≥23

Solution f (t) can be expressed using the unit step function
f(t)=sin(3t−2)u(t−23)=sin(3(t−23))u(t−23).
![]()
Using L![]() {f(t – a)u(t –a)} =e−as F(s) and as
{f(t – a)u(t –a)} =e−as F(s) and as
L{sin(3t)}=3s2+9
![]()
we have
sin(3(t−23))u(t−23)=3e−2s/3s2+9
![]()
Example 15.8
(Second translation – inverse transform) Find
L−1{e−s(s+2)?2}.
![]()
Solution As
L−1{1(s+2)?2}=te−2t
![]()
(using first translation), the factor of e−s will translate in the t domain, t → t −1. Then
L−1{e−s(s+2)?2}=(t−1)e−2(t−1)u(t−1)
![]()
by second translation.
Example 15.9
(Change of scale) Given
L{cos(t)}=ss2+1
![]()
find L![]() {cos(3t)}using the change of scale property of the Laplace transform
{cos(3t)}using the change of scale property of the Laplace transform
L{f?(at)}=1aFsa.
![]()
Solution As
L{cos(t)}=ss2+1=F(s)
![]()
to find cos(3t) we put a =3 into the change of scale property
L{f(at)}=1aFsa
![]()
giving
L{cos(3t)}=13s/3(s/3)?2+1=ss2+9
![]()
Example 15.10
(Derivatives) Given
L{cos(2t)}=ss2+4
![]()
find ![]() {sin(2t)} using the derivative rule.
{sin(2t)} using the derivative rule.
Solution If f(t) = cos(2t) then f′(t) =– 2sin(2t):
L{cos(2t)}=ss2+4
![]()
and f(0) =cos(0) = 1. From the derivative rule L![]() {f′(t)} = sF(s) –f(0),
{f′(t)} = sF(s) –f(0),
L{−2sin(2t)}=s(ss2+4)−1=s2s2+4−1=s2−s2−4s2+4=−4s2+4.
![]()
By linearity,
L{sin(2t)}=1−2(−4s2+4)=2s2+4.
![]()
Example 15.11
(Integrals) Using
L?{∫t0f(τ)dτ}=F(s)s
![]()
and
L{t2}=2s3
![]()
find
L?{t33}.
![]()
Solution As
∫t0τ2dτ=[τ33]?t0=t33
![]()
and
L{t2}=2s3
![]()
then
L?{∫t0τ2dτ}=2/s3s=2s4?⇒?L?{t33}=1s(2s3)=2s4.
![]()
Example 15.12
(Convolution) Find
L−1{1(s−2)(s−3)}
![]()
using the convolution property:
L?{∫10f(t)g(t−τ)dτ}=F(s)G(s).
![]()
Solution
1(s−2)(s−3)=1(s−2)1(s−3).
![]()
Therefore, call
F(s)=1s−2,?G(s)=1s−3
![]()
f(t)=L−1{1s−2}=e2t
![]()
g(t)=L−1{1s−3}=e3t.
![]()
Then by the convolution rule
L−1{1(s−2)(s−3)}=∫t0e2τe3(t−τ)dτ.
![]()
This integral is an integral over the variable τ. t is a constant as far as the integration process is concerned. We can use the properties of powers to separate out the terms in τ and the terms in t, giving
ℒ−1{1(s−2)(s−3)}=e3t∫t0e−τdτ=e3t[e−τ−1]t0=e3t(−e−t+1)=−e2t+e3t.

Example 15.13
(Derivatives of the transform) Find L![]() {t sin(3t)}.
{t sin(3t)}.
Solution Using the derivatives of the transform property
L{tnf(t)}=(−1)?nF(n)(s)
![]()
we have f(t) = sin(3t) and
L{sin(3t)}=3s2+9=F(s)
![]()
(from Table 15.1).
As sin(3t) is multiplied by t in the expression to be transformed, we use the derivative of the transform property with n = 1:
L{t1f(t)}=(−1)?1F(1)(s)=−F′(s)
![]()
to give
L{t?sin(3t)}=−dds(3s2+9)=6s(s2+9)?2.
![]()
Example 15.14
(Derivatives of the transform and the inverse transform) Find
L−1{s(s2+4)?2}
Solution We notice that
s(s2+4)?2=−12dds(1s2+4).
Using the derivatives of the transform property
L{tnf(t)}=(−1)?nF(n)(s)
![]()
and setting n =1 we have
L−1{(−1)dF/ds}=tf(t)
![]()
and as
L−1{1(s2+4)}=12sin(2t)

we have
L−1{s(s2+4)?2}=12t(12sin(2t))=t4sin(2t)

Using partial fractions to find the inverse transform
Partial fractions can be used to find the inverse transform of expressions like
11s+7s2−1
![]()
by expressing F (s) as a sum of fractions with a simple factor in the denominator.
Example 15.15
Find the inverse Laplace transform of
11s+7s2−1
![]()
Solution Factorize the denominator. This is equivalent to finding the values of s for which the denominator is 0, because if the denominator has factors sl and s2 we know that we can write it as c(s – sl) (s –s2) where c, is some number. In this case we could solve for s2 – 1 =0. However, it is not difficult to spot that s2–1 =(s −1) (s + 1). The values for which the denominator is zero are called the poles of the function.
11s+7s2-1=11s+7(s-1)(s+1).

We assume that there is an identity such that
11s+7(s2−1)=As−1+Bs+1.
![]()
Multiply both sides of the equation by (s –1) (s + 1) to get
11s+7=A(s+1)+B(s−1).
![]()
Substitutes=1;then11+7=2A⇒A=9.Substitutes=−1;then−11?+?7=−2B⇒B=2.

So
ℒ−1{11s+7s2−1}=ℒ−1{9s−1+2s+1}=9et+2e−t.

A quick formula for partial fractions
There is a quick way of getting the partial fractions expansion, called the ‘cover up’ rule, which works in the case where all the roots of the denominator of F(s) are distinct. If F(s) = P(s)/ Q(s) then write Q(s) in terms of its factors Q (s)
Q(s)=c(s−s1)(s−s2)(s−s3)…(s−sr)…(s−sn)
![]()
where sl … snare its distinct roots. Then we can find the constant Ar, etc., for the partial fraction expansion from covering up each of the factors of Q in term and substituting s = s r in the rest of the expression:
F(s)=P(s)c(s−s1)(s−s2)(s−s3)…(s−sr)…(s−sn)

then
F(s)=A1(s−s1)+A2(s−s2)+…+Ar(s−sr)+…+An(s−sn)

where

In this case
F(s)=11s+7s2−1=11s+7(s−1)(s+1)=As−1+Bs+1

Then A is found by substituting s =1 into

and B is found by substituting s = −1 into

This gives the partial fraction expansion, as before, as
F(s)=9s+1+2s−1.
![]()
This method can also be used for complex poles; for instance,
1(s2+4)(s+3)=1(s+3)(s−j2)(s−j2).

The roots of the denominator are −3, j2 and –j2, so we get for the partial fraction expansion
1(s2+4)(s+3)=113(s+3)+1(−8+j12)(s−j2)+1(−8−j12)(s+j2).

The inverse transform can be found directly or the last two terms can be combined to give the expansion as
1(s2+4)(s+3)=113(s+3)+−16s+48208(s2+4)=113(s+3)+3−s13(s2+4).

Repeated poles
If there are repeated factors in the denominator, for example,
4(s+1)2(s−2)
then try a partial fraction expansion of the form
4(s+1)2(s−2)=A(s+1)2+Bs+1+Cs−2.

The ‘cover up’ rule cannot be used to find the coefficients A and B.
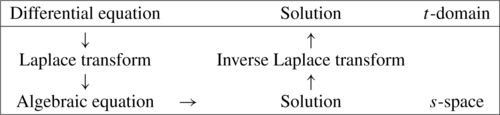
15.5 Solving linear differential equations with constant coefficients
The scheme for solving differential equations is as outlined below. The Laplace transform transforms the linear differential equation with constant coefficients to an algebraic equation in s. This can be solved and then the inverse transform of this solution gives the solution to the original differential equation.
Example 15.16
A d.c. voltage of 3 V is applied to an RC circuit with R = 2000 Ω and C = 0.001 F, where q(0) =0. Find the voltage across the capacitor as a function of t.
Solution From Kirchoff's voltage law, we get the differential equation
2000dqdt+q0.001=3dqdt+0.5q=0.0015

Taking Laplace transforms of both sides of the equation where Q(s) = L![]() {q(t)},
{q(t)},
sQ(s)−q(0)+0.5Q(s)=0.0015s.
![]()
Here, we have used the derivative property of the Laplace transform, q′ (t) = s Q (s)– q (0). Solve the algebraic equation
(s+0.5)Q=0.0015s⇔Q=0.0015s(s+0.5).

We need to find the inverse Laplace transform of this function of s so that we expand using partial fractions, giving
Q=0.003s−0.003s+0.5q=ℒ−1{0.003s−0.003s+0.5}=0.003−0.003e−0.5t.
The voltage across the capacitor is
q(t)c=0.003−0.003e−0.5t0.001=3(1−e−0.5t).

Example 15.17
Solve the following differential equation using Laplace transforms:
d2xdt2+4dxdt+3x=e−3t
![]()
given x(0) = 0.5 and dx(0)/dt= − 2.
Solution Transform the differential equation
d2xdt2+4dxdt+3x=e−3t

to get
(s2X(s)−sx(0)−dxdt(0))+4(sX(s)−x(0))+3X(s)=1s+3.

Here we have used
L{d2dt2}=s2X(s)−sx(0)−dxdt(0)
and
L{dxdt}=sX(s)−x(0).
Substitute x (0) = 0.5 and dx (0) / dt = – 2
s2X(s)−12s+2+4sX(s)−2+3X(s)=1s+3⇔????X(s)(s2+4s+3)=1s+3+12s⇔????X(s)=1(s+3)(s2+4s+3)+s2(s2+4s+3)

Use partial fractions:
1(s+3)(s2+4s+3)=1(s+3)(s+3)(s+1)1(s+3)(s+3)(s+1)=A(s+3)+B(s+3)2+Cs+1⇒????1=A(s+3)(s+1)+B(s+1)+C(s+3)2.

Substituting s = −3
1=−2B??⇔??B=−12.
![]()
Substituting s = −1
1=4C??⇔??C=14.
![]()
Substituting s = 0
1=3A+B+9C.
![]()
Substituting B=−12?and?C=14![]() gives
gives
1=3A−12+94????⇔????A=−14.
![]()
Therefore
1(s+3)2(s+1)=−14(s+3)−12(s+3)2+14(s+1).

We can use the ‘cover up’ rule to find
s2(s+3)(s+1)=34(s+3)−14(s+1)

so that
X(s)=−14(s+3)−12(s+3)2+14(s+1)+34(s+3)−14(s+1)=−12(s+3)2+12(s+3).

Taking the inverse transform, we find
x(t)=−12te−3t+12e−3t=e−3t2(1−t)

15.6 Laplace transforms and systems theory
The transfer function and impulse response function
An important role is played in systems theory by the impulse response function, the Laplace transform of which is called the Transfer Function (or system function). We remember from Chapter 14 that a linear, time-invariant system is represented by a linear differential equation with constant coefficients. We will stick to second-order equations although the results can be generalized to any order.
An LTI system can be represented by
ad2ydt2+bdydt+cy=f(t).

If we take f(t) as the delta function δ(t) then we get
ad2ydt2+bdydt+cy=δ(t).

By definition of the impulse response function we consider all initial conditions to be 0.
Taking the Laplace transform we get
as2Y(s)+bsY(s)+cY(s)=1Y(s)(as2+bs+c)=1Y(s)=1as2+bs+c.
Notice that the poles of this function are found by solving as2+bs+c = 0, which we recognize as the auxiliary equation or characteristic equation from Chapter 14.
This function, the Laplace transform of the impulse response function, is called the transfer function and is usually denoted by H(s), so we have
H(s)=1as2+bs+c
![]()
and L![]() {H(s)} = h(t), where h(t) is the impulse response function.
{H(s)} = h(t), where h(t) is the impulse response function.
Note that the impulse response function describes the behaviour of the system after it has been given an idealized kick.
Example 15.18
Find the transfer function and impulse response of the system described by the following differential equation:
3dydt+4y=f(t).
![]()
Solution To find the transfer function replace f(t) by δ(t) and take the Laplace transform of the resulting equation assuming zero initial conditions:
3dydt+4y=δ(t).
Taking the Laplace transform of both sides of the equation we get
3(sY−y(0))+4Y=1As?y(0)=0,Y=13s+4=H(s).
To find the impulse response function we take the inverse transform of the transfer function to find
h(t)=L−1{13s+4}=e−4t3.

We now discover that we can find the system response to any input function f(t), with zero initial conditions, by using the transfer function.
Response of a system with zero initial conditions to any input f(t)
Assuming all initial conditions are zero, that is, y′ (0) = 0 and y (0) = 0, then the equation
ad2ydt2+bdydt+cy=f(t)

transforms to become
(as2+bs+c)Y(s)=F(s)????⇔????Y(s)=F(s)as2+bs+c.

We have just discovered that the transfer function, H (s), is given by
H(s)=1as2+bs+c.
![]()
Then we find that
Y(s)=F(s)H(s).
![]()
In order to find the response of the system to the function f(t) we take the inverse transform of this expression. We are able to use the convolution property of Laplace transforms which states:
L{∫t0??f(τ)g(t−τ)dτ}=F(s)G(s)

or equivalently
L−1{F(s)G(s)}=∫t0??f(τ)g(t−τ)dτ.

The integral ∫t0 f(t) g(t – τ) dτ is called the convolution of f and g and can be expressed as f(t) * g(t). So we find that the response of the system with zero initial conditions to any input function f(t) is given by the convolution of f(t) with the system's impulse response:
y(t)=L−1{F(s)H(s)}=f(t)*h(t).
![]()
We can use this result to solve two types of problems, given zero initial conditions. If we know the impulse response function of the system then we can find the system response to any input f(t) either by convolving in the time domain y(t) = f(t) ∗ h(t) or by finding the Laplace transform of f (t), F(s), and finding the transfer function of the system L![]() {h (t)} = H(s) and then finding Y(s) = H (s) F (s) and taking the inverse transform of this to find y (t). This type of problem is called a convolution problem. The other type of problem is that given any output, y(t), and given the input, f(t), we can deduce the impulse response of the system. This we do by finding F(s) = L
{h (t)} = H(s) and then finding Y(s) = H (s) F (s) and taking the inverse transform of this to find y (t). This type of problem is called a convolution problem. The other type of problem is that given any output, y(t), and given the input, f(t), we can deduce the impulse response of the system. This we do by finding F(s) = L![]() {f(t)}, Y(s) = L
{f(t)}, Y(s) = L![]() {y(t)} and then H(s) = Y (s) / F (s), thus giving the transfer function. To find the impulse response we find h(t) = L
{y(t)} and then H(s) = Y (s) / F (s), thus giving the transfer function. To find the impulse response we find h(t) = L![]() -l{H(s)}
-l{H(s)}
Example 15.19
The impulse response of a system is known to be h(t) = e3t. Find the response of the system to an input of f(t) = 6 cos(2t) given zero initial conditions.
Solution Method 1. We can take Laplace transforms and use Y(s)) = H(s)F(s). In this case
h(t)=e3t⇔H(s)=L{e3t}=1s−3f(t)=6cos(2t)⇔F(s)=L{6cos(2t)}=6s4+s2.
Hence
Y(s)=H(s)F(s)=6s(s−3)(4+s2).

As we want to find y(t), we use partial fractions:
6s(s−3)(4+s2)=6s(s−3)(s+j2)(s−j2)=1813(s−3)+3(j2−3)(s−j2)−3(j2+3)(s+j2)????(using?the?‘cover?up’?rule)=1813(s?−?3)−3(6s−8)13(s2+?4)=1813(s?−?3)−18s13(s2+?4)+12132(s2+4).

We can now take the inverse transform to find the system response:
?y(t)=L−1{Y(s)}=L−1{1813(s−3)−18s13(s2+4)+12132(s2+4)}=1813e3t−1813cos(2t)+1213sin(2t).
Alternative method. Find y(t) by taking the convolution of f(t) with the impulse response function
y(t)=f(t)*h(t)=(6cos(2t))*(e3t)
![]()
By definition of convolution
(6cos(2t))*(e3t)=∫t0??6cos(2τ)e3(t−τ)dτ.

As this is a real integral we can use the trick of writing cos(2τ) = Re(ej2τ) to make the integration easier. So we find
I=∫t06ej2τe3(t−τ)dτ=6e3t∫t0eτ(j2−3)dτ=6e3t[et(j2−3)j2−3]t0=6e3t(et(j2−3)j2−3−1j2−3)=6e3t(−j2−3)(e−3t(cos(2t)+j?sin(2t))−1).4+9

Taking the real part of this result we get the system response as
∫t06cos(2τ)e3(t−τ)dτ=613(−3cos(2t)+2sin(2t))+1813e3t=−1813cos(2t)+1213sin(2t)+1813e3t

which confirms the result of the first method.
Example 15.20
A system at rest has a constant input of f(t) = 3 applied at t = 0. The output is found to be u(t)(32−32e−2t) . Find the impulse response of the system.
. Find the impulse response of the system.
Solution Since
y(t)=u(t)(32−32e−2t)
![]()
we have
y(s)=32s−32(s+2)=3s+6−3s2s(s+2)=3s(s+2)

and as f(t) = 3, we have
F(s)=3s.
![]()
Hence
H(s)=Y(s)F(s)=3/(s(s+2))3/s=1s+2

giving
h(t)=L−1{1s+2}=e−2t.

Hence the impulse response is h (t) = e−2t.
The frequency response
In this section, we shall seek to establish a relationship between the transfer function and the steady state response to a single frequency input. Consider the response of the system
¨y+3˙y+2y=f(t)
![]()
to a single sinusoidal input ejωt= cos(ωt) + j sin(ωt) with y(0) = 2 and Ý(0) = 1. Taking Laplace transforms we find
s2Y−2s−1+3(sY−2)+2Y=1s−jωY(s2+3s+2)=2s+7+1s−ωY=2s+7s2+3s+2+1(s−jω)(s2+3s+2).

Remember
H(s)=1s2+3s+2=1(s+2)(s+1)Y=2s+7(s+2)(s+1)+1(s−jω)(s+2)(s+1).
The first term in this expression is due to non-zero initial conditions. We are particularly interested in the second term in the expression for Y(s), which we notice may be written as H(s)/(s – jω).
Using the ‘cover up’ rule to write Y(s) in its partial fractions,
Y(s)=5s+1−3s+2+1(−1−jω)(s+1)+1(2+jω)(s+2)+H(jω)s−jω.

Taking inverse transforms we find
Y(t)=5e−t−3e−2t+1−1−jωe−t+12+jωe−2t+H(jω)ejωt.

The first two terms in this expression are caused by the non-zero initial values and decay exponentially. The next two terms also decay with increasing t and are as a result of the abrupt turn on of the input at t = 0. Thus for a stable system, all four terms are part of the transient solution that dies out as t increases. The fifth and final term is the sinusoidal input f(t) = ejωt multiplied by H(jω). H(jω) is a complex constant. This is the steady state response of the system to a single sinusoidal input, which we have shown in this case is given by
Y(t)=H(jω)ejωt.
![]()
We can then see that for a single sinusoid input the steady state response is found by substituting s = jω into the transfer function for the system and multiplying the resulting complex constant by the sinusoidal input. In other words, the steady state response is a scaled and phase shifted version of the input. We can find the response to a sine or cosine input by
y(t)=Re(H(jω)ejωt)????for??f(t)=cos(ωt)
![]()
and
y(t)=Im(H(jω)ejωt)????for??f(t)=sin(ωt)
![]()
Alternatively, we can find the response to ejωt and to e−jωt and use the fact that
cos(ωt)=12(ejωt+e−jωt)sin(ωt)=12j(ejωt−e−jωt)
to write
for??f(t)=cos(ωt),????y(t)=12(H(jω)ejωt+H(−jω)e−jωt)for??f(t)=sin(ωt),????y(t)=12j(H(jω)ejωt−H(−jω)e−jωt).

All of these results make use of the principle of superposition for linear systems.
We have seen in this section that the response to a simple sinusoid can be characterized by multiplying the input by a complex constant H(jω) where ω is the angular frequency of the input. The function H(jω) is called the frequency response function. It is this result that motivates us towards the desirability of expressing all signals in terms of cosines and sines of single frequencies – a technique known as Fourier analysis. We shall look at Fourier Analysis for periodic functions in Chapter 16.
Example 15.21
A system transfer function is known to be
H(s)=13s+1
![]()
then find the steady state response to the following:
(b) f(t) = 3 cos(2t).
Solution (a) The steady state response to a single frequency ejωt is given H(jω)ejωt. Here f(t) = ej2t, so in this case ω = 2 and H(s) is given as 1/(3s + 1). Hence we get the steady state response as
H(j2)ej2t=13(j2)+1ej2t=ej2t1+j6=(1−j6)ej2t37

(b) Using (1/2)(H(jω)ejωt + H(−jω)e-jωt) as the response to cos(ωt) and substituting for Hand ω = 2 gives
12((1−6j)ej2t37+(1+j6)37e−j2t)=174((1−j6)(cos(2t)+j?sin(2t)))+(1+j6)(cos(2t)−j?sin(2t))=137(cos(2t)+6?sin(2t)).

Hence, the steady state response to an input of 3 cos(2t) is
337(cos(2t)+6?sin(2t)).
![]()
15.7 z transforms
z transforms are used to solve problems in discrete systems in a manner similar to the use of Laplace transforms for piecewise continuous systems. We take z transforms of sequences. We shall assume that our sequences begin with the zeroth term and have terms for positive n. f0, f1 f2,..,fn,. is an input sequence to the system. However, when considering the initial conditions for a difference equation it is convenient to assign them to y–j, …, y−2, y−1 etc., where j is the order of the difference equation. So, in that case, we shall allow some elements in the sequence with negative subscript. Our output sequence will be of the form y−j, …, y−2 y−1, y0, y1, y2,…, yn, where the difference equation describing the system only holds for n ≥ 0.
z transform definition
The z transform of a sequence f0, f1 f2,…, fn,… is given by
F(z)=∑∞n=0fnz−n.
As this is an infinite summation it will not always converge. The set of values of z for which it exists is called the region of convergence. The sequence, f0, f1 f2,…, fn,… is a function of an integer, however, its z transform is a function of a complex variable z. The operation of taking the z transform of the sequence fn is represented by Z{fn} = F(z).
Example 15.22
Find the z transform of the finite sequence 1, 0, 0.5,3.
Solution We multiply the terms in the sequence by z—n, where n = 0, 1, 2, … and then sum the terms, giving
F(z)=1+0z−1+0.5z−2+3z−3=1+0.5z2+3z3.
![]()
Example 15.23
Find the z transform of the geometric sequence a0rn where n = 0, 1 …
Solution
F(z)=∑∞n=0a0rnz−n=∑∞n=0a0(rz)n.

Writing this out we get
F(z)=a0+a0(rz)+a0(rz)2+a0(rz)?3+?…

From this we can see that we have another geometric progression with zeroth term a0 and common ratio r/z; hence, we can sum to infinity
provided |r/z| < 1, giving
F(z)=a01−(r/z)=a0zz−r

where
|rz|<1????or????|z|>|r|
We can see that in the case of infinite sequences there will be a region of convergence for the z transform.
The impulse function and the step function
The impulse function or delta function for a discrete system is the sequence
δn={1n=00n≠0.

The step function is the function
un={1n≥00n<0
and the shifted unit step function is
un−j={1n≥j0n<j.

As we are mainly considering sequences defined for n ≥ 0, we could consider that all of the sequences are multiplied by the step function un. That is, they are all ‘switched on’ at n = 0.
Rather than always using the definition to find the z transform, we will usually make use of a table of well-known transforms and properties of the z transform to discover the transform of various sequences. A list of z transforms is given in Table 15.2.


Properties of the z transform
For the following
Z{fn}=∑∞n=0fnz−n=F(Z),????Z{gn}=∑∞n=0gnZ−n=G(z).

Z{afn+bgn}=aF(z)+bG(z).
![]()
2. Left shifting property:
Z{fn+k}=zkF(z)−∑ki=0zk−ifi.
3. Right shifting property (although usually we assume fn= 0 for n < 0 we use f−1 f-2 for the initial conditions when solving difference equations using z transforms):
Z{fn−1}=z−1Z{fn}+f−1Z{fn−2}=z−2Z{fn}+f−2+z−1f−1Z{fn−k}=z−kL{fn}+∑k−1i=0fi−kz−1.
4. Change of scale:
Z{anfn}=F(za)

where a is a constant.
5. Convolution:
Z{∑nk=0gk?fn−k}=G(z)F(z).
The convolution of f and g can be written as
g*f=∑nk=0gk?fn−k.
where gn and fn are sequences defined for n ≥ 0.
6. Derivatives of the transform:
Z{n?fn}=−zdFdz(z).
Example 15.24
(Linearity) Find the z transform of 3n + 2 × 3n.
Solution From the linearity property
Z{3n+2×3n}=3Z{n}+2Z{3n}
![]()
and from the Table 15.2
Z{n}=z(z−1)2????and????Z{3n}=zz−3

(rn with r = 3). Therefore
Z{3n+2×3n}=3z(z−1)2+2zz−3

Example 15.25
(Linearity and the inverse transform) Find the inverse z transform of
2zz−1+3zz−2.
![]()
Solution From Table 15.2
Z−1{zz−1}=unZ−1{zz−2}=2n????(r=2)
So
Z−1{2zz−1+3zz−2}=2un+3×2n

Example 15.26
(Change of scale) Find the inverse z transform of
z(z−2)2

Solution
z(z−2)2=12(z/2)((z/2)−1)2.
From Table 15.2
Z−1{z(z−1)2}=n
Using the change of scale property and linearity:
Z−1{12(z/2)((z/2)−1)2}=12n(2)n=n2n−1.
Example 15.27
(Convolution) Find the inverse z transform of
zz−1zz−4
![]()
Solution Note that
Z−1{zz−1}=un????and????L−1{zz−4}=4n.

Hence, using convolution
Z−1{zz−1zz−4}=un?*4n=∑nk=0uk4n−k.

Writing out this sequence for n = 0, 1, 2, 3,…
1,(1+4),1+4+16,1+4+16+64,…(n=0)(n=1)(n=2)(n=3)

We see that the nth term is a geometric series with n + 1 terms and first term 1 and common ratio 4. From the formula for the sum for n terms of a geometric progression, Sn = a(rn − 1) / (r − 1) where a is the first term, r is the common ratio and n is the number of terms. Therefore, for the n th term of the above sequence, we get:
4n+1−14−1=4n+1−13.

So we have found
Z−1{zz−1zz−4}=4n+1−13.

Example 15.28
(Derivatives of the transform) Using
Z{n}=z(z−1)2
![]()
find Z{n2}.
Solution Using the derivative of the transform property
Z{n2}=Z{nn}=−zddzZ{n}=−zddz(z(z−1)2).

As
ddz(z(z−1)2)=(z−1)2−2z(z−1)(z−1)4=z−1−2z(z−1)3=−z−1(z−1)3

we obtain
Z{n2}=−z(−z−1(z−1)3)=z(z+1)(z−1)3.