
Using partial fractions to find the inverse transform
Example 15.29
Find
Z−1{z2(z−1)(z−0.5)}.

Solution Notice that most of the values of the transform in Table 15.2 have a factor of z in the numerator. We write
z2(z−1)(z−0.5)=z(z(z−1)(z−0.5))

We use the 'cover up’ rule to write
z(z−1)(z−0.5)=10.5(z−1)−1z−0.5=2z−1−1z−0.5
So
z2(z−1)(z−0.5)=2zz−1−zz−0.5

and using Table 15.2 we find
Z−1{2zz−1−zz−0.5}=2un−(0.5)n

15.8 Solving linear difference equations with constant coefficients using z transforms
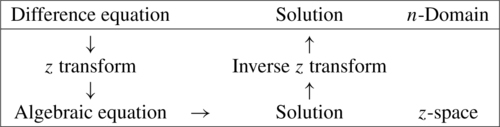
The scheme for solving difference equations is very similar to that for solving differential equations using Laplace transforms and is outlined below. The z transform transforms the linear difference equation with constant coefficients to an algebraic equation in z. This can be solved and then the inverse transform of this solution gives the solution to the original difference equation.
Example 15.30
Solve the difference equation
yn+2yn−1=2un
![]()
for n ≥ 0 given y−1 = 1.
Solution We take the z transform of both sides of the difference equation
yn+2yn−1=2un
![]()
and using the right shift property to find
Z{yn−1}=z−1Y(z)+y−1
![]()
we get
Y(z)+2(z−1?Y(z)+y−1)=2zz−1.
![]()
As y−1=1![]() ,
,
Y(z)(1+2z−1)=2zz−1−2Y(z)=2z2(z−1)(z+2)−2z(z+2).
To take the inverse transform we need to express the first terms using partial fractions. Using the ‘cover up’ rule we get
2z(z−1)(z+2)=23(z−1)+43(z+2)

So
Y(z)=2z3(z−1)+4z3(z+2)−2z(z+2)=2z3(z−1)−2z3(z+2).

Taking inverse transforms we find
yn=23un−23(−2)n
![]()
Check: To check that we have the correct solution we can substitute in a couple of values for n and see that we get the same value from the difference equation as from the explicit formula found.
From the explicit formula and using u0 = 1 (by definition of the unit step function), n = 0 gives
y0=23u0−23(−2)0=23−23=0
![]()
From the difference equation, yn+ 2yn−1 = 2un’where y−1 = 1, n = 0 gives
y0+2y−1=2u0.
![]()
Substituting y−1 = 1 gives y0 = 0 as before.
From the explicit formula, n = 1 gives
y1=23u1−23(−2)1=23+43=2.
![]()
From the difference equation, n = 1gives
y1+2y0=2u1
![]()
substituting y0 = 0 gives y1 = 2, confirming the result of the explicit formula.
Example 15.31
Solve the difference equation
6yn−5yn−1+yn−2=(0.25)n????n≥0
![]()
given y−1 = 1, y−2 = 0.
Solution We take the z transform of both sides of the difference equation 6yn −5yn−1 + yn−2 = (0.25)n and use the right shift property to find
Z{yn−1}=z−1Y(z)+y−1Z{yn−2}=z−2Y(z)+z−1y−1+y−2
which gives
6Y(z)−5(z−1Y(z)+y−1)+z−2Y(z)+y−2+z−1y−1=2z−0.25.
![]()
Substituting the initial conditions y−1 = 1 and y−2 = 0 and collecting the terms involving Y(z) we get
Y(z)(6−5z−1Y(z)+z−2)−5+z−1=zz−0.25?????⇔Y(z)=z(z−0.25)(6−5z−1+z−2)+56−5z−1+z−2????????????????????????−z−16−5z−1+z−2???????????????????????=z(z2(z−0.25)(6z2−5z+1))+z(5z(3z−1)(2z−1))??????????????????????????−z(1(3z−1)(2z−1)).

Using the ‘cover up’ rule we write each of these terms as partial fractions:
z2(z−0.25)(3z−1)(2z−1)????????=z26(z−14)(z−13)(z−12)????????=12(z−14)−431(z−13)+1(z−12)????????5z6(z−13)(z−12)=−53(z−13)+52(z−12)????????13(z−1)(2z−1)=16(z−13)(z−12)??????????????????????????????????????????=−1z−13+1z−12

giving
Y(z)=z2(z−14)−4z3(z−13)+zz−12−5z3(z−13)????????????????+5z2(z−12)+zz−13−zz−12???????????⇔Y(z)=z2(z−14)−2zz−13+52(z−12).
Taking the inverse transform:
yn=12(14)n−2(13)n+52(12)n

15.9 z transforms and systems theory
The transfer function and impulse response function
As before, when considering Laplace transforms, we find that an important role is played by the impulse response function in systems theory of discrete systems. If this case is a sequence, hn, its z transform of is called the transfer function (or system function). We remember from Chapter 14 that a linear, time-invariant system is represented by a linear difference equation with constant coefficients, that is, a second-order LTI system can be represented by
ayn+byn−1+cyn−2=fn.
![]()
If we take fn as the delta function δn, we get
ayn+byn−1+cyn−2=δn.
![]()
By definition of the impulse response function we consider all initial conditions to be 0, that is, y−1 = 0, y−2 = 0; taking the z transform we get
aY(z)+bz−1Y(z)+cz−2Y(z)=1Y(z)(a+bz−1+cz−2)=1Y(z)=1a+bz−1+cz−2Y(z)=z2az2+bz+c.

Notice that the poles of this function are found by solving az2+bz+c = 0, which we recognize as the auxiliary equation or characteristic equation from Chapter 14.
This function, the z transform of the impulse response function, is called the transfer function and is usually denoted by H(z), so we have
H(z)=z2/(az2+bz+c)
![]()
and Z−1{H(z)}= hn, where hnis the impulse response function.
Example 15.32
Find the transfer function and impulse response of the system described by the following difference equation:
3yn+4yn−1=fn
![]()
Solution To find the transfer function replace fn by δnand take the z transform of the resulting equation assuming zero initial conditions:
4yn+3yn−1=δn.
![]()
Taking the z transform of both sides of the equation we get
4Y+3(z−1Y+y−1)=1.As?y−1=0,Y=z4z+3=H(z)=z/4z+(3/4).
To find the impulse response sequence we take the inverse transform of the transfer function to find
hn=Z−1{z/4z+34}=14(−34)n

We can now see why, in the design of digital filters, this is referred to as an infinite impulse response (IIR) filter. This impulse response has a non-zero value for all n. Hence it represents an IIR system.
We now discover that we can find the system response to any input sequence fn, with zero initial conditions, by using the transfer function.
Response of a system with zero initial conditions to any input fn
Assuming all initial conditions are zero, that is, y−1 = 0 and y−2 = 0, then the equation
ayn+byn−1+cyn−2=fn
![]()
transforms to become
aY(z)+bz−1Y(z)+cz−2Y(z)=F(z)⇔y(z)=F(z)z2az2+bz+c.

We have just discovered that the transfer function, H(z) is given by
H(z)=z2az2+bz+c.

Then we find that
Y(z)=F(z)H(z).
![]()
In order to find the response of the system to the function fn we take the inverse transform of this expression. We are able to use the convolution property of z transforms, which states:
Z{∑nk=0fkgn−k}=F(z)G(z)

or equivalently
Z−1{F(z)G(z)}=∑nk=0fkgn−k.

So we find that the response of the system with zero initial conditions to any input sequence fn is given by the convolution of fn with the system's impulse response:
yn=Z−1{F(z)H(z)}=fn*hn,
![]()
We can use this result to solve two types of problems, given zero initial conditions. If we know the impulse response function of the system then we can find the system response to any input fn either by convolving the two sequences
yn=∑nk=0fkhn−k=fn*hn
or by finding the z transform of fn, F(z) finding the transfer function of the system Z{hn} = H(z), then finding Y(z) = H(z)F(z) and taking the inverse transform of this to find yn. This type of problem is called a convolution problem. The other type of problem is that given any output, yn, and given the input, fn we can deduce the impulse response of the system. This we do by finding F(z)= Z{ln}, Y(z) = Z{Yn} and then H(z)= Y(z)/F(z), thus giving the transfer function. To find the impulse response we find hn = Z−l {H(z)}.
Example 15.33
The impulse response of a system is known to be hn = 3(0.5)n. Find the response of the system to an input of f(t) = 2un given zero initial conditions.
Solution Method 1. We can take z transforms and use
Y(z)=H(z)F(z)
![]()
In this case
hn=3(0.5)n⇔H(z)=Z{3(0.5)n}=3zz−0.5f(t)=2un⇔F(z)=Z{2un}=2zz−1
Hence,
Y(z)=H(z)F(z)=6z2(z−0.5)(z−1).

As we want to find yn, we use partial fractions
6z(z−0.5)(z−1)=−6z−0.5+12z−1

(using the 'cover up’ rule). We can know take the inverse transform to find the system response
yn=Z−1{Y(z)}=Z−1{−6zz−0.5+12zz−1}??????????????????????????????????=−6(0.5)n+12un.
Alternative method. Find ynby taking the convolution of fn with the impulse response function
yn=fn*hn=(2un)*(3(0.5)n).
![]()
By definition of convolution
yn=∑nk=02uk(3(0.5)n−k)=∑nk=06(0.5)n−k.

Writing out some of these terms we get
?????6,6(0.5+1),6((0.5)2+0.5+1),(n=0)?????(n=1)????????????(n=2)

6((0.5)3+0.52+0.5+1).(n=3)
We see that each term in the sequence is a geometric progression with first term 6 and common ratio 0.5 and n + 1 terms. Hence
yn=6(1−0.5)n+11−0.5=12(1−(0.5)n+1)=12−12(0.5)(0.5)n??????????????????????????????????????=12−6(0.5)n

which confirms the result of the first method.
The frequency response
As in the case of Laplace transforms and continuous systems, we find we are able to establish a relationship between the transfer function and the steady state response to a single frequency input.
The steady state response of the system to a sequence representing a single frequency input, ejωn, is found to be
Y(z)=H(ejω)ejωn.
![]()
We can then see that for a single sinusoidal input the steady state response is found by substituting z = ejω into the transfer function for the system and multiplying the resulting complex constant by the sinusoidal input. In other words, the steady state response is a scaled and phase shifted version of the input. The function H (ejω) is called the frequency response function for a discrete system.
Example 15.34
A system transfer function is known to be
H(z)=zz+0.2.
![]()
Find the steady state response to the following:
fn=ej2n;
![]()
(b)
f(t)=cos(2n).
![]()
Solution (a) The steady state response to a single frequency ejωn is given by H (ejω)ejωn. fn= ej2n, so in this case ω = 2 and H (z) is given as z/ (z + 0.2). Hence, we get the steady state response as
ej2ej2+0.2ej2n.
(b) Using 12H(ejω)ejωt+H(e−jω)e−iωt![]() as the response to cos(ωn) and substituting for H and ω = 2 gives
as the response to cos(ωn) and substituting for H and ω = 2 gives
yn=12(ej2ej2nej2+0.2+e−j2e−j2+0.2e−j2n)
![]()
Expressing this over a real denominator and simplifying gives
cos(2n)(1+0.2cos(2))+0.2sin(2)sin(2n)1.4+0.4cos(2)

Hence, the steady state response to an input of 3 cos(2n) is
3cos(2n)(1+0.2cos(2))+0.6sin(2)sin(2n)1.4+0.4cos(2).

15.10 Summary
1. The Laplace transform F (s) of the function f (t) defined for t ≥ 0 is:
F(s)=∫∞0e−stf(t)dt.
The Laplace transform is a function of s, where s is a complex variable. Because the integral definition of the Laplace transform involves an integral to ∞, it is usually necessary to limit possible values of s so that the integral above converges (i.e. does not tend to ∞).
2. The impulse function, δ(t), also called a delta function, is the most famous example of a generalized function. The impulse function represents an idealized kick as it lasts for no time at all and has energy of exactly 1.
3. Laplace transforms are usually found by using a table of transforms (as in Table 15.1) and also by using properties of the transform, some of which are listed in Section 15.4.
4. Laplace transforms are used to reduce a differential equation to a simple equation in s-space. This can then be solved and the inverse transform used to find the solution to the differential equation.
5. The transfer function of the system, H (s), is the Laplace transform of its impulse response function with zero initial conditions, h(t). The Laplace transform of the response to any input function, with zero initial conditions, can be found by multiply the Laplace transform of the input function by the transfer function of the system Y (s) = H(s)F(s).
6. The steady state response to a single frequency input ejωt is H (jω)ejωt. H (jω) is called the frequency response function.
7. The z transform of a sequence f0, f1, f2,…, fn,.. is given by
F(z)=∑∞n=0fnz−n.

As this is an infinite summation it will not always converge. The set of values of z for which it exists is called the region of convergence.
8. The discrete impulse function or delta function is defined by
δn={1n=00n≠0.

9. z transforms are usually found by using a table of transforms (as in Table 15.2) and also by using properties of the transform, some of which are listed in Section 15.7
10. z transforms are used to reduce a difference equation to a simple equation in z-space. This can then be solved and the inverse transform used to find the solution to the difference equation.
11. The transfer function of a discrete system, H (z), is the z transform of its impulse response function with zero initial conditions, hn. The z transform of the response to any input function, with zero initial conditions, can be found by multiply the z transform of the input function by the transfer function of the system, Y (z) = H(z) F(z).
12. The steady state response of a discrete system to a single frequency input ejωn is H (ejω)ejωn. H (ejωn) is called the frequency response function.
15.11 Exercises
15.1 Using the definition of the Laplace transform
L{f(t)}=∫∞0e−stf(t)dt
show the following. In each case specify the values of s for which the transform exists.
(b) L{3e−2t}=3s+2![]()
(c) L{5t−3}=5s2−3s![]()
(d) L{3cos(5t)}=3ss2+25![]()
15.2. Find Laplace transforms of the following using Table 15.1:
(b) cos(t2)
(c) t43![]()
(d) 12e−5t![]()
15.3. Find inverse Laplace transforms of the following using tables:
(b) 3s+1![]()
(c) 4s![]()
(d) 2s2+3![]()
(e) 4s9s2+4![]()
(f) 1s3![]()
(g) 5s4![]()
15.4. Find Laplace transforms of the following using the properties of the transform:
(b) 4sin(t)e−2t![]()
(c) tsinh(4t)![]()
(d) u(t−1)![]()
(e) f(t)={sin(t−π)t≥π0t<π
15.5. Find inverse Laplace transforms of the following using the properties of the transform:
(b) s+4(s+4)2+1![]()
(c) e−2ss+1![]()
(d) s−1s2−2s+10![]()
15.6. Find inverse Laplace transforms using partial fractions:
(b) 1s(s2+2)
(c) s(s2−4)(s+1)![]()
(d) 4(s2+1)(s−3)![]()
15.7. In each case solve the given differential equation using Laplace transforms:
(a) y’ + 5y = 0, where y(0) = 3
(b) y’ + y = t, where y(0) = 0
(c) y” + 4y = 9t, where y(0) = 0,y’(0) = 7
(d) y” −3y + 2y = 4e2t, where y(0) = −3,y’(0) = 5
(e) y” + y = t, where y(0) = 1, y’(0) = −2
(f) y” + y‘ + 2y = 4,y(0) = 0,y’(0) = 0
15.8. A capacitor of capacitance C in an RC circuit, as in Figure 15.7, is charged so that initially its potential is V0. At t = 0, it begins to discharge. Its charge q is then described by the differential equation
Rdqdt+qC=0
![]()
Using Laplace transforms, find the charge on the capacitor at time t after the switch was closed.

15.9. Find the response of a system with zero initial conditions to an input of f (t) = 2e−3t, given that the impulse response of the system is h(t) = 1/2(e−t – e−2t).
15.10.
(a) The impulse response of a system is given by h(t) = 3e−4t. Find the system's step response, that is, the response of the system to an input of the step function, u(t).
(b) Use the result that Y(s) = H(s)F(s) where Y is the Laplace transform of the system output, F(s) the Laplace transform of the input and H(s) the system transfer function to show that the step response can be found by
yu(t)=L−1{H(s)s}
(c) Given that the step response of a system is
−43u(t)−e−2t−23e−3t
![]()
then
(i) find the system's transfer function; and
(ii) find its response to an input of e−t.
15.11. A system has a known impulse response of h(t) = e−t sin(2t). Find the input function f (t) that would produce an output of
y(t)=−0.16u(t)+0.4t+0.16e−tcos(2t)??????????????−0.04sin(2t)e−t

given zero initial conditions.
15.12. A system has transfer function
H(s)=1(s+2)2+4
(a) Find its steady state response to a single frequency input of ej5t;
(b) Find the steady-state response to an input of cos(5t) and sin(5t).
15.13. Using the definition of the z transform
Z{fn}=∑∞n=0fnz−n=F(z)
show the following. In each case specify the values of z for which the transform exists:
(b) Z{6un}=6zz−1![]()
(c) Z{3n}=zz−3![]()
15.14. Find z transforms of the following using Table 15.2:
(b) cos(3n)+2sin(3n)![]()
(c) 4(0.2)n−6(2)n![]()
(d) 2ej4n![]()
15.15. Find inverse z transforms of the following using Table 15.2:
(b) z2(z−1)2+11+3/z![]()
(c) 2z2z−3+4z2z+3![]()
(d) z2+z(sin(1)−cos(1))z2−2zcos(1)+1![]()
15.16. Find z transforms of the following using the properties of the transform:
(b) (12)nn![]()
(c) nejn![]()
(d) n3![]()
15.17. Find inverse z transforms of the following using the properties of the transform:
(b) zz−2ej4![]()
(c) z(z−0.4)2![]()
(d) zz−12zz−2![]()
15.18. Find inverse z transforms using partial fractions
(b) z3(z−1)(z2−2)![]()
(c) z2(z−0.1)(5z−2)
(d) z2(z−1)2(z+2)![]()
(e) z2z2+1![]()
15.19 In each case solve the given difference equation using z transforms, n ≥ 0
(a) yn + 5yn−1 = 0, where y−1 = 3;
(b) yn+yn−1=n,?where?y−1=0;![]()
(c) yn + 4yn−1 = 9, where y−1 = 1;
(d) yn −3yn−1 + 2yn−2 = 4 × 2n, where y–1 = −3, y–2 = 5;
(e) yn + yn–1 = n, where y−1 = 0, y–2 = 0
(f) 10yn – 3yn−1 – yn–2= 4, y–1= −1, y−2 = 2.
15.20. Find the response of a system with zero initial conditions, to an input of fn = 2(0.3)n, given that the impulse response of the system is hn = (0.1)n + (−0.5)n.
15.21
(a) The impulse response of a discrete system is given by hn=(0.8)n. Find the system's step response, that is, the response of the system to an input of the step function, un.
(b) Use the result that y(z) =H(z)F(z), where Yis the z transform of the system output, F (z) is the z transform of the input and H (z) is the system transfer function to show that the step response can be found by
yn=Z−1{H(z)zz−1}
![]()
(c) Given that the step response of a discrete system is
124(0.2)n+1048un
![]()
then
(i) find the system's transfer functions; and
(ii) find its response to an input of 6(0.5)n.
15.22. A system has a known impulse response of hn = (0.5)n. Find the input function fn that would produce an output of 2(0.5)n+ 2n −2un given zero initial conditions.
15.23. A system has transfer function H (z) = z/ (10z −3)
(i) find its steady state response to a single frequency input of ej5i;
(ii) find the steady state response to an input of cos(5n) and sin(5n).