
Advances in coal mining technology
Abstract:
This chapter reviews methods of coal extraction, with a focus on advances in technology. The two main methods of coal mining – underground and surface mining – are first described. The following sections cover advances in coal mining machinery and systems, with extensive discussion of the role of robotics and automation. Advances in coal mining operational and information systems are then addressed, followed by some examples of robotics and automation in particular mines worldwide. The chapter concludes with an overview of likely future trends, such as improved safety, productivity and industry consolidation.
7.1 Introduction
According to the World Coal Association, annual worldwide production of coal in 2011 was 6637 million tonnes (Mt) of hard coal and 1041 Mt of brown coal/lignite.* and cement manufacture, and is the primary fuel for electricity generation worldwide (coal-fired power plants currently produce 41% of global electricity). At present extraction rates, coal will continue to be a major source of energy for the next century and, since 2000, global coal consumption has grown faster than any other fuel, with the five largest coal users – China, USA, India, Russia and Japan – accounting for 77% of total global coal use (EIA, 2012; World Coal Association, 2012).
The extraction of coal in the mining industry is in transformation, and will change as the entire mining industry changes. The industry is becoming more automated, more productive and safer, with better communications, fewer directly engaged miners, and more streamlined management structures. Mines are also becoming larger. The transformation began in the mid 1990s, and over the next 10 years will duplicate the transformation that has taken place in the engineering business. During the last 30 years, the number of engineering staff required has reduced considerably due to the increased use of powerful computers and computerized control systems in the workplace. Factors precipitating the changes in the mining industry include: increased liabilities and costs of environmental concerns; safety issues and government regulations; less available coal and more difficult deposits; the advent of automated systems, including measurement and controls systems; introduction of more productive and economical robotic equipment; and the increasing size, capacity and sophistication of new and bigger coal mining and related excavation and haulage equipment (Lien, 2011).
It is expected that annual production in the mining industry will increase due to increased productivity and the use of larger and more productive equipment, coupled with more comprehensive geological and engineering planning and more accurate measurement of productivity, costs and environmental characteristics. Engineering has and will continue to become more specific, accurate, precise and expensive and measurement of progress, production, costs, and productivity more thorough and timely. Quality assurance is also now a key focus area as capacities expand and sampling and analysis become challenged by the larger scale of operation. As transformation accelerates, smaller, less safe and high cost mines will be closed, while coal mined via surface mining will become even more predominant in the industry.
Some evidence for this transformation in the mining industry, particularly coal extraction, comes from research showing that the needed working population in this industry is shrinking or remaining stable, even though the industry is expanding (Lien, 2009). While much of the research was done for the industry in the United States, this is believed to be an emerging global trend. Granted certain areas of the world are experiencing difficulty in recruiting skilled personnel, however, the manning structure of mining is changing dramatically. Just as it happened in the engineering and manufacturing industries in the 1980s and 1990s, it seems that the mining industry is changing, in that a lot more work is now being done by a lot fewer people.
The dramatic increase in the application of robotics and automation is particularly worthy of note. Efforts in this area began in the mid 1990s; however, uptake was neither immediate nor trouble-free. In 2001, a senior researcher working at the experimental mine of the University of Queensland, Australia, commented: ‘The success of automation applications in the mining industry has traditionally not been good’ (Lever, 2001). In his opinion, the benefits of automation at that time had been overstated and oversold as definitive solutions for increasing safety and productivity. But many of the applications had been introduced prematurely and without appropriate field testing to ensure they would work under the rigors of the mining physical environment. More importantly, the culture of the mine was not ready for what was required to make an automated system work (Fig. 7.1).
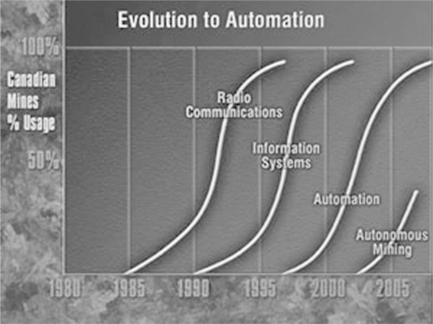
7.1 Mining is transitioning over time, progressing to more and more automation. (Courtesy of Canadian Institute of Mining.)
This chapter opens with an overview of coal mining methods, covering both underground and surface mining. The following sections review advances in coal mining technologies, with focus on automation and robotics. Further sections review the importance of operational and information systems and then address and give examples of robotics and automation in particular mines worldwide. The chapter concludes with an overview of likely future trends.
7.2 Coal extraction methods
Coal mining is generally classified as either surface or opencast mining, and underground or deep mining. Generally the type of coal mining selected is determined by the geological characteristics of the proposed mine, the location of the coal seam or seams, and the equipment available at the time the mine is to begin operation. Most coal is currently mined with one or more underground methods to access the coal, which had been required given the machines available when the mining was started. However, with the introduction of larger and more productive machines, surface mining is rapidly becoming the preferred method for both productivity and safety (Fig. 7.2).
7.2.1 Underground mining
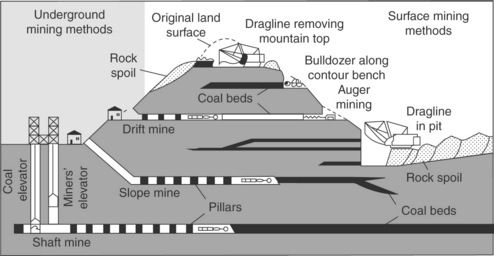
Underground mining in turn is classified according to how access to the coal is accomplished. Thus, an underground mine can be a ‘drift’ mine, where access is bored horizontally from the surface to the deposit, such as the side of a mountain; a ‘slope’ mine where the shaft angles downward, usually following the downward slope of the deposit; and where a shaft is sunk vertically from the surface to the level or levels underground where the coal seam(s) can be accessed.
Underground mining usually falls into two operational categories: ‘room and pillar’, in which rooms of the coal deposit are mined usually with ‘continuous miners’ leaving pillars or blocks of coal to support the roof; and ‘longwall’, in which the coal bed is blocked out into a panel and a ‘shearer’ machine cuts out the ‘face’ of the coal seam. As the face is mined, hydraulic supports hold up the roof of the mine after the shearer advances. The support is eventually moved forward towards the newly exposed coal face allowing the roof to collapse in the so-called goaf void behind the working face.
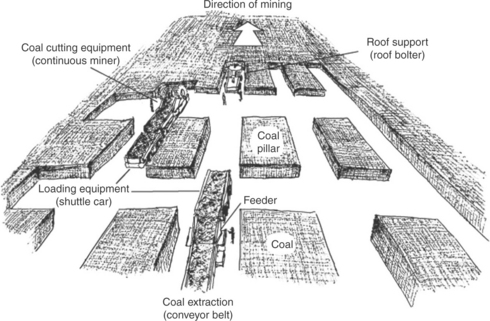
‘Room and pillar’ mining involves a sequence of activities that are performed to first enter and develop the mine and then progressively extract the coal. The continuous miner extracts the coal as it moves forward, loading it onto an attached ‘loader/shuttle car’, which in turn transfers the coal to a conveyor system (Fig. 7.3). About every five meters of advance, the miner is retracted from the face and moved to another ‘room’. It is replaced by a ‘rock-bolting’ machine that drills into the roof and sometimes the walls, and places ‘bolts’ (often made from fibrous material) to secure and bond the strata to prevent caving. After bolting, the continuous miner re-enters and again mines the face for another 5 m, and the process begins again. Some continuous miners are fitted with their own rock-bolters, but these machines are used primarily for initial mine entry. As coal resource is mined in this manner, about 40% of the available coal will have been extracted, the remaining coal being contained in the pillars. Ultimately, as the coal resource is mined out, ‘retreat mining’ is used to extract the ‘pillars’ of coal, allowing the roof of the mine to cave (EIA, 1978) (Fig. 7.4).

7.3 Joy 12HM36 remote control continuous miner has substantially increased the production capability of the miner, but also removes the operator from the dangers of the coal face.
7.4 Room and pillar method leaves blocks of coal to support the mine that are later extracted in ‘retreat mining’ at the end of the mine’s life. (Courtesy of EIA.)
‘Longwall’ mining allows for a greater percentage of coal extraction at the ‘face’ of a coal seam, which can be well over 200 m in width, to be progressively cut out. This method was originally carried out by hand, but shearers and conveyors are now used. The basic idea of this method of mining was first introduced in the late 1700 s in England and named the ‘Shropshire method’ after the mining county in which it was first used. It gained popularity in the late 1800 s when it was found to be more economically and productively beneficial to mining companies than conventional mining methods. Its popularity remained in Europe and Asia to the present day, but not in the United States. The ‘longwall’ method was able to extract a greater percentage of available coal, made mine ventilation somewhat easier, and required fewer explosives to ‘break’ the coal. However, it was originally both very labor and capital intensive activity compared to conventional mining. Most importantly, it was best used in seams measuring higher than 4 m. Not until the 1940s with the introduction of ‘plows’ that better deal with thin seams of coal, and also in the 1960s with the introduction of ‘self-advancing’ roof supports, did ‘longwall’ mining methods gain some popularity in the United States. However, it never exceeded ‘room and pillar’ applications. As the cost of labor increased in the United States, ‘longwall’ economic advantage diminished. ‘Room and pillar’ methods became more mechanized, reducing labor per tonne of coal mined. While ‘room and pillar’ mining enjoyed wide application in the US which continues today, shearer-mined ‘longwall’ operations continued to develop and be applied in Europe, China and Japan. ‘Longwall’ has become highly mechanized, and much more economical given the appropriate coal deposit (Fig. 7.5).

7.5 Longwall method of mining extracts a greater percentage of available coal and can be organized in an ‘advancing’ or ‘retreating’ manner. (Courtesy of EIA.)
‘Longwall’ mining uses three basic system components: a cutting machine, usually a drum shearer but occasionally a plow, which moves back and forth across the coal face; an armored face conveyor (AFC), which moves the coal to the belt conveyor in the gate road for removal from the mine; and moveable roof supports that both support the roof behind the cutting machine and conveyor and protect it and personnel from the caving roof behind the face (Fig. 7.6). A ‘longwall’ mine requires significant development before it goes into production, often close to 1 year, yet it will result in the extraction of 75–80% of available coal. Initially, the coal panel must be prepared. This is done by using continuous miners to dig ‘entries’ or passages on three sides of the panel, which is accomplished using a technique similar to that employed for room and pillar mining. After the blocking of the longwall panel, it is mined in either an ‘advancing’ or ‘retreating’ manner. ‘Retreating’ involves the development of the so-called gate-roads from the point of entry into the block to the far end of the panel, and then mining proceeds back towards the mine entrance. ‘Advancing’ begins at the entrance of the block and proceeds inward with the on-going development of the gate-roads. There are advantages and disadvantages to both methods. Advancing produces more coal from the onset, but introduces complications in continually advancing and maintaining the passages for coal conveying, movement of personnel and ventilation. Retreating pre-explores the block, helping to identify any mining problems (faults, poor roof or gas) that might occur as the mining of the panel progresses.
7.2.2 Surface mining
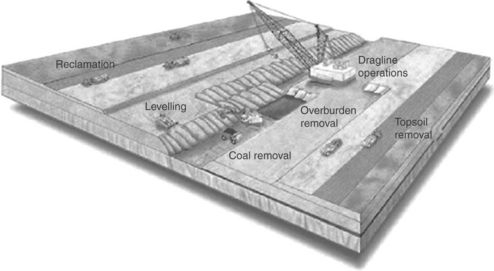
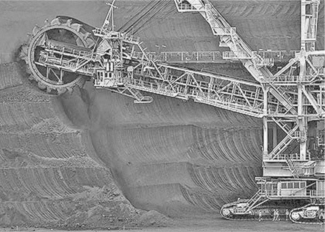
Surface mining is used when the economics of removal of ‘overburden’ to access the coal deposit is viable. Generally, the coal must be fairly close to the surface, but as machines increase their capacity to move material, ‘fairly close’ is becoming deeper and deeper. There are also several categories of surface mining depending on the mining area. The most common is ‘open cut’, where the overburden is removed with ‘draglines’, large ‘electric shovels’ and ‘bucket wheel’ excavators, after it has been drilled and blasted (Fig. 7.7). The overburden is usually loaded into large trucks and removed to a waste area in the mine. The coal is then ‘stripped,’ usually after blasting, using hydraulic excavators or loaders, and removed from the mine using haulage trucks or conveyors. Other types of surface mining include ‘mountain top removal’, which is an alternative to doing drift and/or slope mining. In some cases the entire top of a mountain might be considered overburden and often removed to be used to fill in depressions nearby. Other rarer surface methods include ‘auger’ mining, where a trench is excavated and augers are used to extract the coal, usually in a narrow (thinner) seam, and often from ‘high wall’ mining where thicker seams are sheared or excavated with special machinery (Figs 7.8 and 7.9).

7.3 Advances in mining technology
Even though this chapter deals with coal extraction, it should be pointed out that all types of mining, particularly surface mining, share many characteristics, regardless of the mineral being extracted. All mines use heavy equipment, measure productivity in terms of hours worked vs tonnes mined, usually operate under the same safety regulations, and their workers often have the same unions as representatives, and the same engineering, geological and metallurgical education at the same universities. In addition, in recent years there has been a significant consolidation of mining companies, many of which are often engaged in mining not only coal but also base metals and iron ore. Therefore, in this chapter, many of the examples of new technologies, machinery enhancement, machinery enlargement and efficiency will be drawn from the mining of minerals other than coal, but these technological improvements are currently being implemented in coal operations, or will be in the near future.
The following sections review advances in mine equipment. One theme that dominates is the increased uptake of robotics and automation. Automation and robotics are making much headway in mining due to the rapidly advancing state of communications, comprising cable and wireless, both within the mine, and between the mine and other entities. Two developments in particular in recent years have dovetailed to make automation and tele-operation in mines more possible. The first is the ability to construct a robust communication backbone in the mine, capable of handling data, voice, and video signals. The second is the development of ‘smart’ mining equipment, outfitted with onboard computers and a host of sensors.
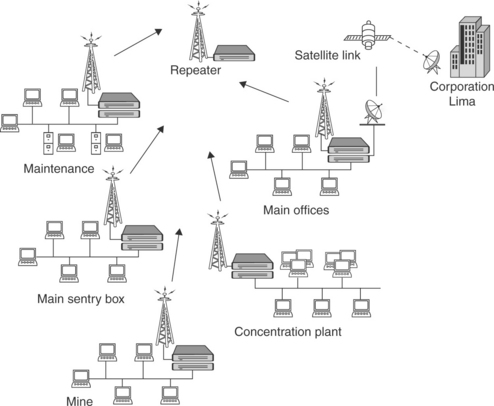
Bandwidth may be a somewhat limited commodity in surface mines, but the full radio frequency spectrum is available underground. International real-time communication connecting the mine site, regardless of how remote it is, to a centralized corporate office, to customers, to vendors and service providers is now a reality. With high-speed transmission, repeaters, and satellite interface, all forms of communication are available including data, video, and voice. Several companies specialize in designing and installing such communication systems and have proven system reliability, durability, and efficiency. These companies include: Spidersat Communications; Datasat Communications; Maxwell Technology (MAXI-SAT); Pactel International; and Infosat Communications (Fig. 7.10).
7.10 Remoteness of mining operations is no longer a barrier to communications, with the availability of satellites and repeaters.
Not long ago, communication on the mine site, both surface and underground, consisted solely of handheld radios and telephones. Today, the mine equipment can actually be used as communication nodes, with the mine site being transformed into a mesh communication system, rather than a point-to-point system. Such a system allows the tracking of equipment and personnel via Wi-Fi, two-way voice with VoIP telephones, remote video, and through-the-earth emergency communications (PED). The system enables real-time vehicle diagnostics and payload data, automated traffic control, proximity detection, and remote centralized blast initiation. Several companies offer comprehensive communication systems, which have been installed on several mine sites. The companies include: Cattron Group International ‘SIAMnet’; Becher Varis Mining Systems; Minecom Solutions; Mine Radio Systems; GAI-Tronics; and Mine Site Technologies ‘ImPact’.
There is a rapid increase in tele-operation of both underground and surface mining equipment consisting of new and automated drills, load-haul dumps (LHD), driverless trains, trucks and other equipment. Sweden, Canada and Australia seem to be in the forefront of this transition to automation. Inco (Canada) has been involved for over 15 years, as have Kiruna Iron Ore mine in Sweden and the Rio Tinto’s Pilbara mines in Western Australia.
7.3.1 Underground mining technology
Continuous miners, used primarily in ‘room and pillar’ mining and also to prepare roadways in a ‘longwall’ systems, have incrementally improved over the last 20 years (Fig. 7.11). But they are not advancing in automation as quickly as longwall equipment, with the exception that they are more often remotely controlled by an operator, rather than by an operator sitting on the machine. The Australian Coal Association Research Program (ACARP), via a project being conducted by the CSIRO Mining Technology Group, is carrying out some of the most advanced research in this area. The goal is to deliver ‘self-steering’ capability that will enable continuous miners to maintain 3D position, azimuth, horizon, and grade control within a variable seam. Technology currently under test includes the means to accurately determine both the location and orientation of a continuous miner in real-time using a combination of a navigation-grade inertial navigation unit, Doppler radar, and optical flow technologies (Reid, 2011).

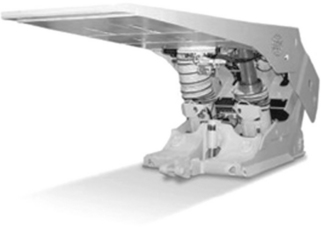
It is the view of Joy Mining Machinery (Schaeffer, 2008) that progress in ‘longwall’ mining will occur from today to the future as follows. First, the introduction of advanced automation to optimize the cutting cycle will lead to higher production. This will progress to one worker per coal face to minimize people on the face, and tele-remote operation of all machinery at the face will follow. Finally, the ultimate implementation of a workerless face, with all people out of harm’s way, will come about. In addition to shearers, roof supports, and conveyors, the ‘longwall’ of the future will employ fiber optics, Wi-Fi and broadband, enabling fully automated shearer and roof supports, through cameras on the shearer, and remote monitoring of operation and control of operation. The results will be higher productivity, zero requirement for personnel on the face, and automatic face alignment (Fig. 7.12).

In all underground mining, particularly of coal, critical to both safety and productivity is supporting and securing the roof and sidewalls of a room in ‘room and pillar’, or roadway in ‘longwall’. This is done with rock-bolting, and the technology has improved both in the design of support systems, available bolt and mesh materials, and the machinery to perform the work. Mine Master and JH Fletcher Mining Equipment have made significant advances to improve both the speed and flexibility of this machinery. However, bolting is still a bottleneck in production, in that the present commercial method cannot keep up with the speed and distance a new continuous miner or longwall shearer can travel. Some single production longwall units can operate at rates of almost 10 Mt/a.
New ‘smart’ LHDs and drills used in underground mining might be out-fitted with as many as 150 sensors of one type or another. These include sensors to measure hydraulic or engine pressure, air pressure sensors on tires, and accelerometers to sense rocks lying in the vehicle’s path. Additionally, they may have stereo vision for a three-dimensional view of the mining area and the machine itself (DeGaspari, 2003).
7.3.2 Surface mining technology
Draglines, bucketwheel excavators, and electric shovels are the largest and most expensive equipment on a surface mine, and are used primarily to remove overburden. In some cases, particularly in large lignite (soft coal) mines, buck- etwheel excavators and electric shovels not only remove overburden but are also used to mine the coal. However, hydraulic shovels and loaders are the most common machines used for actual coal extraction (Figs 7.13 and 7.14). They allow for more accurate control by the operator to avoid contamination with other material during loading. Shovels and other loading equipment are usually sized to the haulage truck in a designed ‘Truck/Shovel’ system.

7.13 P&H 2800 series rope shovel, a very common workhorse machine removing overburden and mining coal throughout the world. (Now owned by Joy Global Inc.; courtesy of Nick Hillier.)

7.14 Bucyrus Dragline removing overburden at a mine in Queensland, Australia. (Now owned by Caterpillar.)
The geology, mine design, size, and characteristics of the coal deposit will determine what equipment will be purchased and applied. It may be a single (rarely), or multiple face operation where overburden is removed by shovels, and coal is mined by large loaders or hydraulic excavators. At each face several machines support the main digging machines to clean up, clear areas, level loading areas, and perform other activities to achieve the greatest efficiency of the large machine. Such equipment includes dozers, smaller loaders, graders, fuel trucks, maintenance trucks, water trucks, drills, personnel transport trucks, and other miscellaneous machinery.
All equipment have local operators and/or operating crews, which are assisted by sophisticated controls that are designed by the equipment manufacturers, engineering firms, or control system suppliers. Even smaller equipment is very large, handles large capacities of material, is very robust, and is critical to the efficient operation of the mine. Over the last twenty years, significant improvements have been made in motors, power source, gear arrangements, maintenance monitoring controls, maintenance scheduling, operational availability, and capacity through increased bucket size on the loading machines and operating cycles. Additionally, the equipment is outfitted with GPS systems, load monitoring systems, programmed loading and swing systems, and accident avoidance systems. There has been research to fully automate loading machines, with some success at the research and test level. However, to a mine, the availability and productivity of the loading machines is often regarded as being much more important than the cost of labor to operate them. To that extent, most operation automation has so far only been used to increase the efficiency of operator performance, and not to eliminate the need for operators. The only exception is the application of remote control and automation to drills, haul trucks, and other material transport such as conveyors and trains.
In recent years, new types of equipment and machinery have been introduced to the surface mining. The Wirtgen surface miner can effectively mine softer material, particularly coal not needing blasting. It uses a cutting drum driven by its engine to cut into the seam, remove the coal, and convey it to either a truck or transport conveyor for haulage. This machine is also used underground to increase the size of roadways (dinting machine) (Wirtgen, 2008) (Fig. 7.15).

7.15 Wirtgen surface miner is gaining popularity as an extractor of coal with minimum contamination.
After the overburden and or coal have been extracted, it must be transported. Today, the most common method is trucks. These can range widely in size, with 90–220 tonnes capacity not being unusual. Some mines use smaller trucks, in the 18–70 tonnes range, and a few use larger trucks up to 365 tonnes. Generally, for a new mining venture, the shovel capacity and truck size are coordinated, so that a shovel can load a truck in 4–5 passes. It is important to note that a truck fleet needs haul roads, fueling stations, lubrication, and tire repair facilities, and all the associated equipment to provide this infrastructure.

7.16 Cat 797 mechanical drive haul truck has a capacity of 400 tonnes, as do trucks from Kamatsu (960E electric drive) and Liebherr (T282 electric drive).
Over the last 50 years mining equipment has substantially increased in its capacity to load and haul material. Examples are the capacity development of P&H Shovel, and the similar expansion of truck capacities. In 1960, a P&H Rope Shovel had the bucket loading capacity of 12 tonnes. In 1967, it increased to 15. 1969 saw the introduction of the 2800 with a capacity of 25 tonnes and the ability to efficiently load 90 tonne trucks, such as the Cat 777, which was used in both mining and construction. This capacity increased to 36 tonnes in 1975, and in 1991 the capacity was doubled to 75 tonnes with the introduction of the 4100, which with the model 4100XPB handles 90 + tonnes. As the capacities of shovels increased, so too has the haulage capacity of trucks, with the introduction of the 380–400 tonne trucks by manufacturers such as Komatsu, Caterpillar and Liebherr.
Another innovation in this area is the increasing use of in-pit crushing (IPC) and conveying of overburden, and avoiding the use of truck haulage. Mining companies have been finding significant productivity and economic advantages to using such a system, including: reduced vehicle costs for such as fuel, tires, and maintenance; more cost effectiveness on longer hauls; less personnel and more safety potential; and 24 hour operation (Fig. 7.17). It also has some disadvantages, including more complexity in mine planning, higher initial capital cost, need for longer life mines for payback, and need for redundancy against possible failure (Kung, 2008).

7.3.3 Specific examples of developments in metalliferous or hard-rock mining applicable to coal mining
As mentioned earlier, many of the new developments in metalliferous or hard-rock mining should soon qualify for application to coal mining. Atlas Copco has been in the forefront in the development and deployment of the automation technology that exists today in many mines. It has developed production grade computerized control and guidance systems on large underground drill rigs for remote control, and satellite hole navigation systems for surface crawler rigs. It has advanced automatic bit changers, automatic tunnel profiling systems, and measurement while drilling that provides for the logging of rock strata characteristics using the rock drill as a sensor (DeGaspari, 2003) (Fig. 7.18).

7.18 Remote control drills, both on the surface and underground, allow for personnel to operate machinery away from the work area.
Caterpillar is in the process of automating its largest hauling trucks, but it is not the first on this track and may be playing catch up with Japan-based Komatsu, which already runs automated trucks at the Gaby mine in Chile, and at Rio Tinto in the Pilbara, Western Australia. Somewhat more information is being presented by the Caterpillar organization in describing its new equipment. The newly introduced trucks will be equipped with numerous high-tech gadgets and software to keep them on the road. GPS receivers continuously monitor the location and direction of the trucks. Laser range finders sweep the road in front of the trucks to identify large objects. Video equipment determines whether an object is a hazard or not. The information runs through a computer program that tells the robotic driver how to avoid the obstacle. The software to run the trucks is adapted from Carnegie Mellon University work done for DARPA (Defense Advanced Research Projects Agency). The University participated in a competition that required unmanned vehicles equipped with sensors and artificial intelligence systems to navigate through an urban environment filled with obstacles (June, 2008).
7.4 Systems and information
Essential to the transformation of mining in the last 10–20 years has been the introduction of methods to monitor, control, and enhance all operations with the introduction of systems to accurately plan and record the results of activity.
7.4.1 Operational systems
Data generation, planning, measuring, monitoring, execution, and data collection are the backbone of managing the modern mining operation. The amount of data is enormous and growing. Data manipulation and reporting has matured significantly over the last 25 years. Some mining companies have developed their own proprietary systems. But with the maturation of the industry in this area, information systems that organize planning information and effectively present result against a plan have also been developed by smaller consulting organizations. An example of such is the ‘Minesight’ program developed by Mintec of Phoenix AZ, which is a fully integrated information system. Other vendors of similar software that not only offer fully integrated systems but also provide individual ‘plug and play modules’ or ‘solutions’ include Gemcom Software International (Surpac), Runge Ltd. (Xpac), Maptek Ltd. (Vulcan), and Ventyx (Minescape), to name the most commonly used.
To take one example, Mintec’s Minesight system provides several functions including geomodeling, mine design, long-term and short-term planning, and also has a production reporting system. Following is a short description of each function. Geomodeling has the complete functionality to build and manage 3D block, stratigraphic, and surface models. Drillhole, blasthole, and other sample data are stored and the system provides for filtering, importing, exporting, formatting, reporting, and editing. There is seamless movement of information from the beginning stages of exploration to grade control as the mine approaches exhaustion. The Design Function provides CAD-based design with all the interactive tools needed to create and manage an operation (Fig. 7.19). Tools for blast pattern design, end-of-period maps, economic and ultimate pit shells, life-of-mine and phase scheduling, road/ramp design, and complete dump, spoil, and dyke design give open pit engineers comprehensive tools for surface operations. Since these systems provide extensive underground layout and design tools, drift and stope design is simple to perform while maintaining extensive functionality.

The Long Term Planning Function allows engineering to create, manage, and analyze the unique scenarios and ever-changing possibilities of a mine plan from exploration to feasibility analysis. It allows for the plan to incorporate equipment requirements, dump location, multiple stockpiles, and quality, quantity, and ratio constraints (Fig. 7.20). The Short Term Planning Function includes cut design and reserve calculations combined with powerful tools for scheduling, optimization, equipment planning, and haulage. Interactive planning and haulage tools, powered by a centralized planning database, are available for on-the-fly reserve calculations while creating material/routing reports, route profiles, and cycle time files. The Production Function facilitates drill and blast design, day-to-day grade control, in-mine production management, and reconciliation of production data. It leverages the versatile power of a centralized planning database, tying back into geomodeling, design and planning functions. To run this complex program system requires only the computation power typically associated with a home computer. Such would include Microsoft XP, Vista or 7 operating system, a dual-core processor, 3 GB of RAM and a 300 GB hard-disk (Fig. 7.21).


7.4.2 Maintenance and inventory control systems
In the late 1970s and early 1980s, consultants introduced early paper and pencil, and later computerized, maintenance systems to mining companies. Mincom Pty Ltd. (now owned by ABB and known as Ventyx) first developed a mini-computer based maintenance system (Fig. 7.22). Today, its Ellipse Application is one of the pre-eminent maintenance and inventory control systems available. This system provides a good example of the maintenance management software that is available and exists in many of the larger mines around the world. It incorporates a comprehensive asset (equipment) data base, equipment operational data, preventive maintenance information and check points, repair and maintenance schedules and procedures, workforce planning, inventory control including supply chain management, and financial data collection and control (Fig. 7.22). It is comprehensive and can be implemented in a modular ‘plug and play’ manner.

7.22 Maintenance planning and execution in a well-planned and controlled manner is absolutely critical to the successful operation of mines that are becoming more capital intensive.
As capital equipment becomes larger, it becomes more expensive. With the addition of automation, robotics, remote operation, etc., both maintenance, and inventory control of spares and replacement components becomes critical. Mines will require maximum utilization of capital equipment, with availability exceeding 90%. Not only will maintenance have to be predictive and scheduled, but the right parts, at the right price, and at the right time will be essential to maintain cost control. In addition, the needs of the customers, namely the buyer and shipper of coal, will have to be integrated into the planning system. The correct amount of product, at the right time, at the right specification will determine both customer satisfaction and also maximum revenue.
Cost reduction will be achieved through a more efficient management of the mine, its assets, and its product. Modern mine management will adopt practices and procedures known collectively as a ‘Demand Driven Supply Chain’ (IBM Global Services, 2009). It will be instrumented using sensors, actuators, radio frequency identification (RFID), and smart devices to automate transactions such as inventory location, replenishment detection, transportation location, and bottleneck identification. It will support realtime data collection and transparency from mining of raw material (coal), to shipper and customer delivery (Fig. 7.23).

7.23 RFID tags can be as small as a pin-head, yet can contain kilobytes of information and can track people, equipment, inventory, machines, and product.
It will be interconnected by optimized information flows, intercompany integration of information across the network, collaborative decision making through decision support and business intelligence – starting with the customer. And it will integrate corporate-level risk-management programs for integrated financial controls with operational performance monitoring and measurement. Finally, it will be intelligent with network planning, execution and decision analysis using data collected from operations to build intelligent models to predict product quality and quantity problems before they occur. With advanced communication, the company will create models to predict equipment failure, triggering preventive maintenance orders to prevent unplanned shutdowns. The individual mine and the company will use simulation models to evaluate trade-offs of cost, time, quality, service, fuel, and other variables against the criteria of profitability and customer satisfaction.
7.5 Automation in practice
Before identifying some mines that are actively introducing automation, consideration should be given to how best to implement automation in the mining industry. According to Mottola and Holmes (2009):
Automation should not be viewed as a solution in itself, and failures have occurred due to limited preparation of the employees and community, as well as a lack of management commitment to the long-term implementation cycle. By its very nature, automation means a fundamental change in how the overall mining process will operate. As such, the change is dramatic and can be traumatic.
In 1998, INCO’s Sudbury LHD and Drilling Automation program was withdrawn because of insufficient teamwork across the organization, between internal research and development groups with divergent philosophies, and a lack of support from head office. Studies are now being done to ensure the success of autonomous mining by focusing on the integration of people, technology and process
Hugh Durrant-Whyte, the Director of the Australian Centre for Field Robotics at the University of Sydney and a leader in the development of robotics for mining, believes that the industry should concentrate not just on how to automate individual trucks or drills, but on how to automate the entire mine. This will involve change in the way mining business models are developed, and information systems with automated equipment will achieve the goals of the model. In other words, a culture of automation is required. He considers that systems in which unmanned trucks communicate not only with a control room but with each other and, together with a controller, decide which haul road to take, will be the way of the future. Additionally, there will be automated drill rigs sending drilling rate data directly to the mine database and then out to the 3D models used by robotic shovels for grade control (DeGaspari, 2003).
It is clear that the skill and training needs of coal miners, technicians and engineers are changing. As the industry undergoes what appears to be a systemic change, its needs for trained and experienced personnel will increase, but probably neither in the traditional skills nor in the same numbers that have served the mining industry in the past. Universities and other training institutions may struggle to meet the skill needs of the new coal mine.
7.5.1 Examples of mines using automation
Cliffs Natural Resources, Pinnacle Mine in West Virginia, in 2010, installed a Bucyrus International modern automated longwall plow system. The plow does not require operators to be located at the production face, resulting in a much higher level of operator safety (Fig. 7.24).

7.24 New Bucyrus Plow at Cliffs allows for efficient thin seam mining. (Bucyrus in now owned by Caterpillar.)
Zhungeer Coal Mine, in Inner Mongolia China, is a lignite mine producing some 7 million tonnes of per year, with a work force of 1900. Since 1995, the mine has been using continuous mining technology (bucketwheel excavators, conveyor belts and spreaders) for the removal of an up to 100 m thick top soil layer. The author was part of the original foreign national team to perform a feasibility study for the Zhungeer complex in 1982. Advancement in operator training, equipment modification, and supervisor training have increased productivity by 50%. The mine has two pits, and uses both draglines and bucketwheels to produce almost 10 million tonnes annually (Fig. 7.25).

In 2005 the DeBeers Finsch Mine (a diamond mine in South Africa), installed seven Toro 5OD (T50D) automated driverless dump trucks and one Toro 007 semi-automatic LHD to transport ore to an underground crusher. Since its installation, the trucks have successfully navigated the haulage loop without any failures. The trucks operate at 25 km/h (about 16 mph), which is faster than a manually-operated truck (Fig. 7.26). With no time lost for driver change-over at shift, the system allows Finsch to move about 16 000 tonnes per day (tpd) of ore, compared to about 15 000 tpd for manual operation. The economic value of the system is also improved due to reduced truck maintenance costs since the equipment is more consistently used and better managed under computer control. Accidents due to human error and poor-driving habits have been eliminated (Kral, 2008).

7.26 Finsch Diamond Mine in South Africa has over five years’ experimenting with automation under its belt.
The Zhangji Mine, a coal operation located in China, has installed automation equipment to decrease environmental accidents and maximize environmental management. The production and environmental monitoring information is collected synchronously and incorporated into production statistics and environmental management systems. The mine uses an Ethernet network for its system that conducts real-time monitoring, transmitting relevant data to a server, and then seamlessly uploading it to the management system. This provides the mine with integrated information to ensure that no environmental hazards arise as a result of the operation. The centralized monitoring network collects all environmental information on gases, ventilation, temperature, and other factors to ensure safety of personnel (Moxa Products, 2008) (Fig. 7.27).
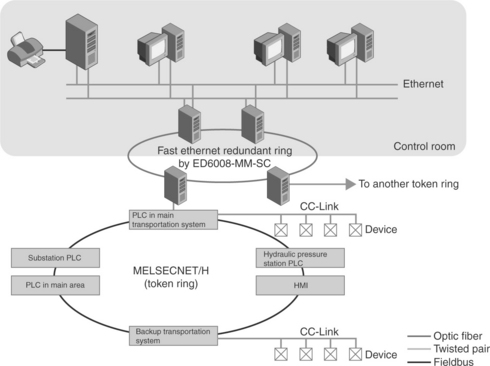
7.27 Zhangji Mine layout to monitor environmental variables to increase safety and manage environmental risks.
In 2006, the Andina Mine, a large underground copper mine in Chile, began to integrate about 15 different automation systems that monitor and control equipment. This included fans, compressors, chutes, electric machines, and dust suppressors, as well as large systems and networks for water, air, ventilation, vibration measurement and analysis, traffic lights, and closed-circuit TV. The data are gathered by an isolated automation system, and operated from a control room forty kilometers from the mine. The idea is to make quantifiable improvements in such key performance indicators as availability, reliability, energy efficiency, safety, and security (ABB, 2006).
Sandvik Mining and Construction markets a system that allows remote operation and supervision of an automated underground loader or truck fleet from a surface control room for underground mining. The autonomous fleet is operated in an area that is isolated from personnel and other equipment, greatly enhancing underground mine safety. Driving (tramming) and dumping are fully automated, while bucket loading is performed using tele-remote operation. A single system operator is able to manage the operation of multiple automated machines. From a single station, the system operator is able to plan and monitor production, operate machines tele-remotely, and view machine operation information such as alarms, measurements, gear selection, engine RPM, and tramming speed. Operators can monitor and operate the barrier system, control and supervise a fleet of equipment, and generate production and condition monitoring reports. Sandvik underground loaders and trucks can be fitted with the AutoMine onboard package. It includes a navigation system that continuously determines the location of the machine within the underground mine environment, and controls the autonomous tramming and dumping operations. The navigation system uses laser scanners to scan tunnel wall profiles to verify machine position. An onboard video system provides the high-quality video necessary for tele-remote operation. Wireless Local Area Network (WLAN) provides the radio link between the machine and the communication system installed in the autonomous production area.
Rio Tinto recently introduced Komatsu’s FrontRunner Autonomous Haulage System to its iron ore mines in the Pilbara, Western Australia. The company has also commenced trials with driverless locomotives, 5–290 tonne trucks and at least one automated drill rig, all controlled from Perth, 1300 km away. All truck navigation at the mine is remotely controlled. Rio is also experimenting with driverless iron ore trains that currently haul ore to ports as far as 450 km away. The trains are generally 2.4 km in length, and constitute one of the first driverless heavy-haul train systems in the world (Moore, 2009) (Fig. 7.28).

Since December 2008, Rio Tinto has been operating automation technologies at a test site called ‘A-Pit’, where its robotic trucks with artificial intelligence ‘learn’ the layout of the mine and use sensors to detect and avoid obstacles. The shift to automation is not without its challenges, foremost among which is securing vast satellite networks against cyber-attacks. In the cyclone-prone and brutally hot Pilbara (temperatures up to over 50 °C), the ‘A-Pit’ trial was completed in 2011. Its findings will form the basis for an operations-wide rollout of remote and driverless technologies. According to the company, in the future humans will no longer need to be hands-on as all the equipment will be autonomous – able to make decisions on what to do based on their environment and interaction with other machines. Operators will oversee the equipment from the remote operations center (Trounson, 2008).
Most major equipment suppliers are participating in the changing marketplace, and rapidly offering various degrees of automation built within their newer equipment, and adaptable to equipment already in the field. Some that are rapidly being introduced to both surface and underground mines include: Caterpillar’s ‘Minestar’ and MINEGEM Systems; Atlas Copco’s ‘Scooptram’ Automation System; Komatsu’s Autonomous Haulage System (AHS), ‘FrontRunner’; Leica Geosystems ‘Jigsaw 360’ with DrillNav, DigNav, etc.; Sandvik ‘Automine’; Bucyrus Programmable Mining Control (PMC) and underground coal controllers. In addition, ‘after-market’ vendors are beginning to offer automation and adaptations to equipment to improve both productivity and safety. As with all new technology, the buyer would be wise to introduce change incrementally, in tandem with assessing how the technology is affecting the organization. Also, it is best to use only technology that has been proven in the ‘real’ field and working environment.
7.6 Future trends and conclusions
The mining industry is transforming and becoming safer for workers, more productive and efficient, and re-structuring both how it operates within its organizations. Application of this transformation is readily apparent in the coal industry, as automation expands, mines increase in size, and organizations consolidate.
7.6.1 Safety
Productivity, cost, and safety are the themes associated with automation. Safety is still very much an issue in mining, especially safety in coal mines. It is almost impossible to obtain accurate statistic on either accidents or deaths due to mining. Mine operators and government authorities at the local and national level do not always divulge such information. Therefore, all one can do is review available news reports and other sources of information. These seem to put the number of deaths annually as exceeding 8000, and there could be substantially more, especially if injury-related deaths are included. It has been estimated that close to 70% of such deaths occur in the coal mining industry. During the last decade, China has averaged over 4000 deaths per year. Russia is second to China. South Africa is averaging close to 200 deaths per year. Canada and the United States have approximately 70 deaths per year. Chile averages 34, and Australia has 13 deaths per year. These statistics are for all forms of mining, but most are related to coal mining. Although these numbers are high, they are dwarfed by the loss of life that has occurred in the mining industry in previous decades (MacNiell, 2008). Many experts in the industry believe that removing people from the coal face underground will improve safety, as will remotely controlling or increasing automation to assist operators in a surface mining situation.
7.6.2 Productivity
According to John Steele, Colorado School of Mines, (quoted in DeGaspari, 2003), overall mining automation could result in significant cost savings. For example, travel time to and from underground to the surface can take hours, reducing productive work by as much as 50% in a typical 8- or 12-h shift. Automation and particularly remote operation of mining equipment from the surface could double productivity. There are also additional benefits if workers can be removed from the underground mine. Such benefits might include the elimination of large, power-hungry fans that control the flow of air, if miners were no longer underground.
7.6.3 Consolidation and financing
Mineral exploration and mine development have been traditionally funded during the last two centuries in a very familiar manner – mainly either equity financing or debt financing, and usually a combination of both. In the early stages it takes the form of private placement, issuance of stock, selling of bonds and, if the enterprise is moderately successful, some sort of initial public offering on a stock exchange. Most in the industry are familiar with the penny stocks, and their use to fund early stage drilling programs. ‘On exchange’ financing requires reporting standards, such as resource and reserve estimates and approved accounting documentation, which ‘offexchange’ transactions do not require. But ‘off-exchange’ transactions are not easy, and often one is dealing with more sophisticated investors in such arrangements as private placements, venture capital, joint ventures, and royalty-based financing.
The coal mining industry is consolidating to increase productivity, improve safety records, and reduce costs. The Chinese government has urged greater effort to consolidate coal mines to reduce the number of outdated small mines. The aim is for the output of large mines, with production capacities of over 50 million tonnes, to account for 65% of the country’s total (Anon, 2010). Another example of consolidation is US company Peabody’s acquisition of MacArthur Coal in Australia. Indian companies are buying coal mines in Indonesia. National companies in both India and China are searching for coal mines in the US. Ambre Energy from Australia has purchased the controlling interests in at least three large open pit mines in the western United States. Arch Coal, the second largest coal company in the US, recently purchased International Coal Group (ICG), which operated several mines in the Appalachia mining district in the eastern US. More recently, Glencore-Xstrata has announced the merger that will form the second largest mining company on the planet.
The OEM or equipment manufacturers are also consolidating and combining. Caterpillar purchased Bucyrus International, manufacturer of shovels and draglines. Prior to this, Caterpillar had purchased Terex Mining Trucks. Joy Mining Machinery acquired P&H, a manufacturer of shovels and draglines, and recently purchased China’s International Mining Machinery Holdings Ltd. Even service companies are getting into the acquisition business, such as ABB Engineering acquisition of Mincom, a maintenance system provider, and several smaller engineering companies.
The mine of the future, including coal mines, will require an even larger capital investment than that has been experienced in the past. In the 1990s a $500 million capitalization was considered major. Today, a commercial mine will require in excess of a billion dollars, as well as the reserves and management talent to warrant such a project. Mining is familiar with major investment and with financing from New York, London and other money centers. In the last 20 years, national governments have become major players in the financing of developments. At one time their contribution was in kind, such as the land, infrastructure, personnel, and permitting. Today, they often pro-offer some cash contribution to the enterprise, often borrowed from an international financing entity. However, the country’s ownership of the mine industrial complex is much greater, and often includes an equity position in the mining company sponsoring the development. Other financial players are becoming more important (Eggert, 2010).
Coal mine financing is a long-term proposition, with major capital costs but with 20–50 years of operation and continuing return on investment. However, that return is significantly lower than that available from the mining operations of other metals. Most mines are financed through a combination of internal financing, bank loans, hedge fund investment, and stock offerings. Given that the price is stable and much coal is sold under longterm contracts, the investment is secure and the margins acceptable to longterm safety-seeking investors.
7.6.4 Conclusion
The coal mining industry is experiencing a transition toward being much more automated, system and machinery driven, in order to achieve efficiency, cost, safety, and environmental goals. The transition will accelerate as new technology becomes proven, practical, and more economic. The resulting changes will affect not only the skills, but also the numbers employed in mining. Many older, and most smaller, mining operations will experience incremental changes as they modernize equipment and upgrade information systems that better accumulate, consolidate, and analyze data. These changes will increase productivity and reduce costs, but marginally affect how the mine is operated and the number of people.
However, new and large mining developments, where major deposits are being exploited over the decades, will look entirely different from what has existed in the past. Geology through production will be fully integrated from planning through the operating phases over the life of the mine. Equipment and methods will be automated to an observable extent, relying less and less on human intervention and operators, particularly at the individual equipment level. How, when, and who performs maintenance will change dramatically, with much more plug and play of wear parts to be replaced on a schedule, automatic and timely lubrication and fueling of vehicles, and greater use of equipment manufacture specialists and consultants. Engineering and operational planning will be even more thorough and specific, and be used not only to design the mine and develop the metallurgical processes, but also to detail the comprehensive information system, off-mine location of facilities, and infrastructure.
The mining of large coal deposits will transition toward an even more sophisticated enterprise. There will be an impact on the ‘culture’ of the industry as the workforce becomes more technical and less manual in nature, the population becomes smaller, and management and technical staff become more centralized, having responsibilities for several mining operations rather than one. The economic success of the mining facility will increasingly rely on the fully integrated planning and control of mining, processing, storing, and transporting of finished product to market. Additionally, many responsible for activities on the property will physically be removed, and exercise their responsibilities through electronic communication and feedback mechanisms connected directly to the machinery and the systems that control them. The industry can expect that the measured productivity of an individual, as measured by tonnes mined per unit of time, to increase by between 100% and 600% in the next 10 years.
7.7 References
ABB. ABB integrates copper mine automation systems. http://www.automation.com/content/abb-integrates-copper-mine-automation-systems, 2006. [[accessed 26 October 2012].].
Anon. China intensifies push for consolidation in coal mining industry’. China Peoples’ Daily, 21 October 2010. http://english.people.com.cn/90001/90778/90861/7173645.html, 2010. [[accessed 19 May 2012].].
DeGaspari, J., Armchair mining: technology is getting miners out of the tunnels and into the control room. (Feature Focus: Automated Controls). Mechanical Engineering CIME, 2003:42–48. [May].
Eggert, R.G., Staking a claim for Cambodia Cambodia. International Conference on Mining Phnom Penh, 2010:26–27. [May.].
EIA (US Energy Information Administration). International Energy Statistics. http://www.eia.gov/emeu/international/coaltrade.html, 2012. [[accessed 19 May 2012].].
EIA (US Energy Information Administration). Bituminous Coal and Lignite Production and Mine Operations DOE/EIA-0118(78) (Washington, DC, June 1980). http://emfi.mines.edu/emfi2011/Coal%20Mining%20Methods%20-%20EMFI%20Summary.pdf, 1978. [[accessed 15 May 2012].].
IBM Global Services. The Smarter Supply Chain of the Future – Metals and Mining. http://www-05.ibm.com/de/processindustry/pdfs/cscostudy-metal-en.pdf, 2009. [[accessed 30 July 2012].].
June, L. Caterpillar and CMU team up to create world’s largest robotic monster truck. http://www.engadget.com/2008/11/07/darpa-and-cmu-team-up-to-create-worlds-largest-robotic-monster, 2008. [[accessed 02 March 2013].].
Kral, S. De Beers, Sandvik team up on underground automation. Mining Engineering. 2008; 60(11):18–20. [November].
Kung, W., Minimizing the cost of overburden removal’. Presentation at the World Mining Congress Krakow, Krakow Poland, 2008:7–8. [October 2008.].
Lever, P.J.A., Mining Automation: The Future, and an Excavation Automation Example. Proceedings of 2001 Presentation at the Australian Conference on Robotics and Automation, 2001. [Sydney, November.].
Lien, L. Mining’s new sink hole lack of people, lack of talent – or is it an expert myth. In: Presentation at the Annual Meeting of Society of Mining Engineers. USA: Denver Colorado; 2009:22–25. [February 2009.].
Lien, L. Mining in the next decade. Mine Engineering. 2011; 63(2):40–46.
MacNiell, P. International mining fatality database’, New South Wales Department of Primary Industry. http://www.resources.nsw.gov.au/__data/assets/pdf_file/0009/182484/International-Mining-Fatality-Database-project-report.pdf, 2008. [[accessed 02 January 2012].].
Moore, E. Hands off: New products offer the automation advantage. CIM Magazine. 2009; 4:56–59. [(February)].
Mottola, L., Holmes, S., Considering a people strategy at enable the successful deployment of process and technology. Mining Conference Sponsored by The Society of Mining Engineers. Denver Colorado, USA, 2009. [24 February.].
Moxa Products. Reliable Ethernet based coal mining monitoring system. http://www.moxa.com/applications/success_stories_Coal_Mining_Transportation_Monitoring_System.htm, 2008. [[accessed 19 May 2012].].
Schaeffer, M., Longwall automation: State of the artPresentation at MINExpo. USA: Las Vegas, 2008. [September.].
Trounson, A. Rio to trial automated mining’, The Australian, January 19, 2008. http://www.theaustralian.com.au/business/mining-energy/rio-to-trial-automated-mining/story-e6frg9df-1111115351260, 2008. [[accessed 26 October 2012].].
Wirtgen GmbH. Cutting, Crushing and Loading Rock in One Working Operation the World of Wirtgen Surface Miners, Windhagen, Germany. http://www.wirtgen.de/media/redaktion/pdf-dokumente/05_surface_miner/_allgemein_2/broschure_surface_miner/p_miner_e.pdf, 2008. [[accessed 03 February 2013].].
World Coal Association http://www.worldcoal.org/coal/coal-mining, 2012 [[accessed 20 May 2012].].
*Mention of particular companies and their products is made for illustration purposes only and does not imply endorsement by the author, editor or publisher. Readers are encouraged to consider the chapter as a starting point and use other resources to complete their exploration of the subject.