![15.6 DESIGN 1: DESIGN SPACE EXPLORATION WHEN s = [1 1]t](https://imgdetail.ebookreading.net/cover/cover/software_development/EB9780470934630.jpg)
15.6 DESIGN 1: DESIGN SPACE EXPLORATION WHEN s = [1 1]t
The feeding point of input sample t0 is easily determined from Fig. 15.1 to be p = [0 0]t. The time value associated with this point is t(p) = 0. Using Eq. 15.3, we get s = 0. Applying the scheduling function in Eq. 15.8 to eP and eT, we get
(15.13)
![]()
(15.14)
![]()
This choice for the timing function implies that both input variables P and Y will be pipelined. The pipeline direction for the input T flows in a southeast direction in Fig. 15.1. The pipeline for T is initialized from the top row in the figure defined by the line j = m − 1. Thus, the feeding point of t0 is located at the point p = [−m m]t. The time value associated with this point is given by
(15.15)
![]()
Thus, the scalar s should be s = −2m. The tasks at each stage of the SPA derived in this section will have a latency of 2m time steps compared to Design 1.a.
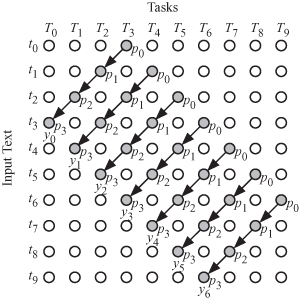
Figure 15.2 shows how the dependence graph of Fig. 15.1 is transformed to the DAG associated with s = [1 1]t. The equitemporal planes are shown by the gray lines and the execution order is indicated by the gray numbers. We note that the variables P and Y are pipelined between tasks, while variable T is broadcast among tasks lying in the same equitemporal planes. Pipelining means that a value produced by a source task at the end of a time step is used by a destination task at the start of the next time step. Broadcasting means that a value is made available to all tasks at the start of a time step.
Figure 15.2 DAG for Design 1 when n = 10 and m = 4.

There are three simple projection vectors such that all of them satisfy Eq. 15.12 for the scheduling function in Eq. 15.8.
The three projection vectors will produce three designs:
(15.16)
![]()
(15.17)
![]()
(15.18)
![]()
The corresponding projection matrices could be given by
(15.19)
![]()
(15.20)
![]()
(15.21)
![]()
Our task design space now allows for three configurations for each projection vector for the chosen timing function. In the following sections, we study the multithreaded implementations associated with each design option.
15.6.1 Design 1.a: Using s = [1 1]t and da = [1 0]t
A point in the DAG given by the coordinate p = [i j]t will be mapped by the projection matrix Pa into the point
(15.22)
![]()
A ![]() corresponding to Design 1.a is shown in Fig. 15.3. Input T is broadcast to all nodes or tasks in the graph and word pj of the pattern P is allocated to task Tj. The intermediate output of each task is pipelined to the next task with a higher index such that the output sample yi is obtained from the rightmost task Tm−1.
corresponding to Design 1.a is shown in Fig. 15.3. Input T is broadcast to all nodes or tasks in the graph and word pj of the pattern P is allocated to task Tj. The intermediate output of each task is pipelined to the next task with a higher index such that the output sample yi is obtained from the rightmost task Tm−1. ![]() consists of m tasks and each task is active for n time steps.
consists of m tasks and each task is active for n time steps.
Figure 15.3 ![]() for Design 1.a when m = 4.
for Design 1.a when m = 4.

15.6.2 Design 1.b: Using s = [1 1]t and db = [0 1]t
A point in the DAG given by the coordinate p = [i j]t will be mapped by the projection matrix Pb into the point
(15.23)
![]()
The projected ![]() is shown in Fig. 15.4.
is shown in Fig. 15.4. ![]() consists of n − m + 1 tasks. Word pi of the pattern P is fed to task T0 and from there, it is pipelined to the other tasks. The text words ti are broadcast to all tasks. Output yi is obtained from task ti at time step i and is broadcast to other tasks. Each task is active for m time steps only. Thus, the tasks are not well utilized as in Design 1.a. However, we note from the DAG of Fig. 15.4 that task T0 is active for the time step 0 to m − 1, and Tm is active for the time period m to 2m − 1. Thus, these two tasks could be mapped to a single task without causing any timing conflicts. In fact, all tasks whose index is expressed as
consists of n − m + 1 tasks. Word pi of the pattern P is fed to task T0 and from there, it is pipelined to the other tasks. The text words ti are broadcast to all tasks. Output yi is obtained from task ti at time step i and is broadcast to other tasks. Each task is active for m time steps only. Thus, the tasks are not well utilized as in Design 1.a. However, we note from the DAG of Fig. 15.4 that task T0 is active for the time step 0 to m − 1, and Tm is active for the time period m to 2m − 1. Thus, these two tasks could be mapped to a single task without causing any timing conflicts. In fact, all tasks whose index is expressed as
(15.24)
![]()
Figure 15.4 ![]() for Design 1.b when n = 10 and m = 4.
for Design 1.b when n = 10 and m = 4.

can all be mapped to the same node without any timing conflicts. The resulting ![]() after applying the above modulo operations on the array in Fig. 15.4 is shown in Fig. 15.5. The
after applying the above modulo operations on the array in Fig. 15.4 is shown in Fig. 15.5. The ![]() now consists of m tasks. The pattern P could be chosen to be stored in each task or it could circulate among the tasks where initially Ti stores the pattern word pi. We prefer the former option since memory is cheap, while communications between tasks will always be expensive in terms of area, power, and delay. The text word ti is broadcast on the input bus to all tasks. Ti produces outputs i, i + m, i + 2m, … at times i, i + m, i + 2m, and so on.
now consists of m tasks. The pattern P could be chosen to be stored in each task or it could circulate among the tasks where initially Ti stores the pattern word pi. We prefer the former option since memory is cheap, while communications between tasks will always be expensive in terms of area, power, and delay. The text word ti is broadcast on the input bus to all tasks. Ti produces outputs i, i + m, i + 2m, … at times i, i + m, i + 2m, and so on.
Figure 15.5 Reduced ![]() for Design 1.b when n = 10 and m = 4.
for Design 1.b when n = 10 and m = 4.

15.6.3 Design 1.c: Using s = [1 1]t and dc = [1 1]t
A point in the DAG given by the coordinate p = [i j]t will be mapped by the projection matrix Pc into the point
(15.25)
![]()
The resulting tasks are shown in Fig. 15.6 for the case when n = 10 and m = 4, after adding a fixed increment to all task indices to ensure nonnegative task index values. The DAG consists of n tasks where only m of the tasks are active at a given time step as shown in Fig. 15.7. At time step i, input text ti is broadcast to all tasks in DAG. We notice from Fig. 15.7 that at any time step, only m out of the n tasks are active. To improve task utilization, we need to reduce the number of tasks. An obvious task allocation scheme could be derived from Fig. 15.7. In that scheme, operations involving the pattern word pi are allocated to task Ti. In that case, the DAG in Fig. 15.3 will result.
Figure 15.6 Tasks at each SPA stage for Design 1.c.

Figure 15.7 Task activity at the different time steps for Design 1.c.