![15.8 DESIGN 3: DESIGN SPACE EXPLORATION WHEN s = [1 0]t](https://imgdetail.ebookreading.net/cover/cover/software_development/EB9780470934630.jpg)
15.8 DESIGN 3: DESIGN SPACE EXPLORATION WHEN s = [1 0]t
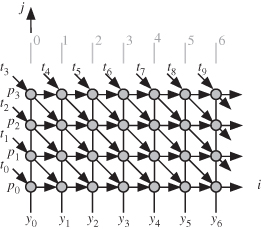
The dependence graph of Fig. 15.1 is transformed to the DAG in Fig. 15.11, which is associated with s = [1 0]t. The equitemporal planes are shown by the gray lines and the execution order is indicated by the gray numbers. We note that the variables P and T are pipelined between tasks, while variable Y is broadcast among tasks lying in the same equitemporal planes.
Figure 15.11 DAG for Design 3 when n = 10 and m = 4.
There are three simple projection vectors such that all of them satisfy Eq. 15.12 for the scheduling function. The three projection vectors are
(15.29)
![]()
(15.30)
![]()
(15.31)
![]()
Our multithreading design space now allows for three configurations for each projection vector for the chosen timing function.
15.8.1 Design 3.a: Using s = [1 0]t and da = [1 0]t
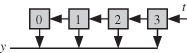
The ![]() corresponding to Design 3.a is drawn in Fig. 15.12 for the case when n = 10 and m = 4. Task Tj stores only the value pj, which can be stored in a register similar to Design 1.a. The outputs of all the tasks must be combined using a reduce operation.
corresponding to Design 3.a is drawn in Fig. 15.12 for the case when n = 10 and m = 4. Task Tj stores only the value pj, which can be stored in a register similar to Design 1.a. The outputs of all the tasks must be combined using a reduce operation.
Figure 15.12 ![]() for Design 3.a.
for Design 3.a.
These two projection vectors produce the same configuration as Design 3.a. However, unlike Design 3.a, each task stores the entire pattern P in the on-chip memory.