
1.2 Complex Systems and Microprocessors
We tend to think of our laptop as a computer, but it is really one of many types of computer systems. A computer is a stored program machine that fetches and executes instructions from a memory. We can attach different types of devices to the computer, load it with different types of software, and build many different types of systems.
So what is an embedded computer system? Loosely defined, it is any device that includes a programmable computer but is not itself intended to be a general-purpose computer. Thus, a PC is not itself an embedded computing system. But a fax machine or a clock built from a microprocessor is an embedded computing system.
This means that embedded computing system design is a useful skill for many types of product design. Automobiles, cell phones, and even household appliances make extensive use of microprocessors. Designers in many fields must be able to identify where microprocessors can be used, design a hardware platform with I/O devices that can support the required tasks, and implement software that performs the required processing. Computer engineering, like mechanical design or thermodynamics, is a fundamental discipline that can be applied in many different domains. But of course, embedded computing system design does not stand alone. Many of the challenges encountered in the design of an embedded computing system are not computer engineering—for example, they may be mechanical or analog electrical problems. In this book we are primarily interested in the embedded computer itself, so we will concentrate on the hardware and software that enable the desired functions in the final product.
1.2.1 Embedding Computers
Computers have been embedded into applications since the earliest days of computing. One example is the Whirlwind, a computer designed at MIT in the late 1940s and early 1950s. Whirlwind was also the first computer designed to support real-time operation and was originally conceived as a mechanism for controlling an aircraft simulator. Even though it was extremely large physically compared to today’s computers (it contained over 4,000 vacuum tubes, for example), its complete design from components to system was attuned to the needs of real-time embedded computing. The utility of computers in replacing mechanical or human controllers was evident from the very beginning of the computer era—for example, computers were proposed to control chemical processes in the late 1940s [Sto95].
A microprocessor is a single-chip CPU. VLSI (very large scale integration) technology has allowed us to put a complete CPU on a single chip since the 1970s, but those CPUs were very simple. The first microprocessor, the Intel 4004, was designed for an embedded application, namely, a calculator. The calculator was not a general-purpose computer—it merely provided basic arithmetic functions. However, Ted Hoff of Intel realized that a general-purpose computer programmed properly could implement the required function, and that the computer-on-a-chip could then be reprogrammed for use in other products as well. Because integrated circuit design was (and still is) an expensive and time-consuming process, the ability to reuse the hardware design by changing the software was a key breakthrough. The HP-35 was the first handheld calculator to perform transcendental functions [Whi72]. It was introduced in 1972, so it used several chips to implement the CPU, rather than a single-chip microprocessor. However, the ability to write programs to perform math rather than having to design digital circuits to perform operations like trigonometric functions was critical to the successful design of the calculator.
Automobile designers started making use of the microprocessor soon after single-chip CPUs became available. The most important and sophisticated use of microprocessors in automobiles was to control the engine: determining when spark plugs fire, controlling the fuel/air mixture, and so on. There was a trend toward electronics in automobiles in general—electronic devices could be used to replace the mechanical distributor. But the big push toward microprocessor-based engine control came from two nearly simultaneous developments: The oil shock of the 1970s caused consumers to place much higher value on fuel economy, and fears of pollution resulted in laws restricting automobile engine emissions. The combination of low fuel consumption and low emissions is very difficult to achieve; to meet these goals without compromising engine performance, automobile manufacturers turned to sophisticated control algorithms that could be implemented only with microprocessors.
Microprocessors come in many different levels of sophistication; they are usually classified by their word size. An 8-bit microcontroller is designed for low-cost applications and includes on-board memory and I/O devices; a 16-bit microcontroller is often used for more sophisticated applications that may require either longer word lengths or off-chip I/O and memory; and a 32-bit RISC microprocessor offers very high performance for computation-intensive applications.
Given the wide variety of microprocessor types available, it should be no surprise that microprocessors are used in many ways. There are many household uses of microprocessors. The typical microwave oven has at least one microprocessor to control oven operation. Many houses have advanced thermostat systems, which change the temperature level at various times during the day. The modern camera is a prime example of the powerful features that can be added under microprocessor control.
Digital television makes extensive use of embedded processors. In some cases, specialized CPUs are designed to execute important algorithms—an example is the CPU designed for audio processing in the SGS Thomson chip set for DirecTV [Lie98]. This processor is designed to efficiently implement programs for digital audio decoding. A programmable CPU was used rather than a hardwired unit for two reasons: First, it made the system easier to design and debug; and second, it allowed the possibility of upgrades and using the CPU for other purposes.
A high-end automobile may have 100 microprocessors, but even inexpensive cars today use 40 microprocessors. Some of these microprocessors do very simple things such as detect whether seat belts are in use. Others control critical functions such as the ignition and braking systems. Design Example 1.1 describes some of the microprocessors used in the BMW 850i.
Design Example 1.1 BMW 850i Brake and Stability Control System
The BMW 850i was introduced with a sophisticated system for controlling the wheels of the car. An antilock brake system (ABS) reduces skidding by pumping the brakes. An automatic stability control (ASC+T) system intervenes with the engine during maneuvering to improve the car’s stability. These systems actively control critical systems of the car; as control systems, they require inputs from and output to the automobile.
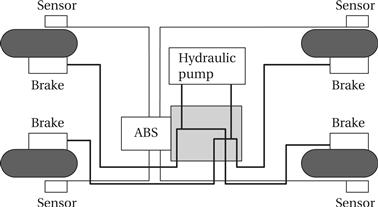
Let’s first look at the ABS. The purpose of an ABS is to temporarily release the brake on a wheel when it rotates too slowly—when a wheel stops turning, the car starts skidding and becomes hard to control. It sits between the hydraulic pump, which provides power to the brakes, and the brakes themselves as seen in the accompanying diagram. This hookup allows the ABS system to modulate the brakes in order to keep the wheels from locking. The ABS system uses sensors on each wheel to measure the speed of the wheel. The wheel speeds are used by the ABS system to determine how to vary the hydraulic fluid pressure to prevent the wheels from skidding.
The ASC+T system’s job is to control the engine power and the brake to improve the car’s stability during maneuvers. The ASC+T controls four different systems: throttle, ignition timing, differential brake, and (on automatic transmission cars) gear shifting. The ASC+T can be turned off by the driver, which can be important when operating with tire snow chains.
The ABS and ASC+T must clearly communicate because the ASC+T interacts with the brake system. Since the ABS was introduced several years earlier than the ASC+T, it was important to be able to interface ASC+T to the existing ABS module, as well as to other existing electronic modules. The engine and control management units include the electronically controlled throttle, digital engine management, and electronic transmission control. The ASC+T control unit has two microprocessors on two printed circuit boards, one of which concentrates on logic-relevant components and the other on performance-specific components.
1.2.2 Characteristics of Embedded Computing Applications
Embedded computing is in many ways much more demanding than the sort of programs that you may have written for PCs or workstations. Functionality is important in both general-purpose computing and embedded computing, but embedded applications must meet many other constraints as well.
On the one hand, embedded computing systems have to provide sophisticated functionality:
• Complex algorithms: The operations performed by the microprocessor may be very sophisticated. For example, the microprocessor that controls an automobile engine must perform complicated filtering functions to optimize the performance of the car while minimizing pollution and fuel utilization.
• User interface: Microprocessors are frequently used to control complex user interfaces that may include multiple menus and many options. The moving maps in Global Positioning System (GPS) navigation are good examples of sophisticated user interfaces.
To make things more difficult, embedded computing operations must often be performed to meet deadlines:
• Real time: Many embedded computing systems have to perform in real time—if the data isn’t ready by a certain deadline, the system breaks. In some cases, failure to meet a deadline is unsafe and can even endanger lives. In other cases, missing a deadline doesn’t create safety problems but does create unhappy customers—missed deadlines in printers, for example, can result in scrambled pages.
• Multirate: Not only must operations be completed by deadlines, but many embedded computing systems have several real-time activities going on at the same time. They may simultaneously control some operations that run at slow rates and others that run at high rates. Multimedia applications are prime examples of multirate behavior. The audio and video portions of a multimedia stream run at very different rates, but they must remain closely synchronized. Failure to meet a deadline on either the audio or video portions spoils the perception of the entire presentation.
Costs of various sorts are also very important:
• Manufacturing cost: The total cost of building the system is very important in many cases. Manufacturing cost is determined by many factors, including the type of microprocessor used, the amount of memory required, and the types of I/O devices.
• Power and energy: Power consumption directly affects the cost of the hardware, because a larger power supply may be necessary. Energy consumption affects battery life, which is important in many applications, as well as heat consumption, which can be important even in desktop applications.
Finally, most embedded computing systems are designed by small teams on tight deadlines. The use of small design teams for microprocessor-based systems is a self-fulfilling prophecy—the fact that systems can be built with microprocessors by only a few people invariably encourages management to assume that all microprocessor-based systems can be built by small teams. Tight deadlines are facts of life in today’s internationally competitive environment. However, building a product using embedded software makes a lot of sense: Hardware and software can be debugged somewhat independently and design revisions can be made much more quickly.
1.2.3 Why Use Microprocessors?
There are many ways to design a digital system: custom logic, field-programmable gate arrays (FPGAs), and so on. Why use microprocessors? There are two answers:
• Microprocessors are a very efficient way to implement digital systems.
• Microprocessors make it easier to design families of products that can be built to provide various feature sets at different price points and can be extended to provide new features to keep up with rapidly changing markets.
CPUs are flexible
The paradox of digital design is that using a predesigned instruction set processor may in fact result in faster implementation of your application than designing your own custom logic. It is tempting to think that the overhead of fetching, decoding, and executing instructions is so high that it cannot be recouped.
CPUs are efficient
But there are two factors that work together to make microprocessor-based designs fast. First, microprocessors execute programs very efficiently. Modern RISC processors can execute one instruction per clock cycle most of the time, and high-performance processors can execute several instructions per cycle. Although there is overhead that must be paid for interpreting instructions, it can often be hidden by clever utilization of parallelism within the CPU.
CPUs are highly optimized
Second, microprocessor manufacturers spend a great deal of money to make their CPUs run very fast. They hire large teams of designers to tweak every aspect of the microprocessor to make it run at the highest possible speed. Few products can justify the dozens or hundreds of computer architects and VLSI designers customarily employed in the design of a single microprocessor; chips designed by small design teams are less likely to be as highly optimized for speed (or power) as are microprocessors. They also utilize the latest manufacturing technology. Just the use of the latest generation of VLSI fabrication technology, rather than one-generation-old technology, can make a huge difference in performance. Microprocessors generally dominate new fabrication lines because they can be manufactured in large volume and are guaranteed to command high prices. Customers who wish to fabricate their own logic must often wait to make use of VLSI technology from the latest generation of microprocessors. Thus, even if logic you design avoids all the overhead of executing instructions, the fact that it is built from slower circuits often means that its performance advantage is small and perhaps nonexistent.
It is also surprising but true that microprocessors are very efficient utilizers of logic. The generality of a microprocessor and the need for a separate memory may suggest that microprocessor-based designs are inherently much larger than custom logic designs. However, in many cases the microprocessor is smaller when size is measured in units of logic gates. When special-purpose logic is designed for a particular function, it cannot be used for other functions. A microprocessor, on the other hand, can be used for many different algorithms simply by changing the program it executes. Because so many modern systems make use of complex algorithms and user interfaces, we would generally have to design many different custom logic blocks to implement all the required functionality. Many of those blocks will often sit idle—for example, the processing logic may sit idle when user interface functions are performed. Implementing several functions on a single processor often makes much better use of the available hardware budget.
Programmability
Given the small or nonexistent gains that can be had by avoiding the use of microprocessors, the fact that microprocessors provide substantial advantages makes them the best choice in a wide variety of systems. The programmability of microprocessors can be a substantial benefit during the design process. It allows program design to be separated (at least to some extent) from design of the hardware on which programs will be run. While one team is designing the board that contains the microprocessor, I/O devices, memory, and so on, others can be writing programs at the same time. Equally important, programmability makes it easier to design families of products. In many cases, high-end products can be created simply by adding code without changing the hardware. This practice substantially reduces manufacturing costs. Even when hardware must be redesigned for next-generation products, it may be possible to reuse software, reducing development time and cost.
How many platforms?
Why not use PCs for all embedded computing? Put another way, how many different hardware platforms do we need for embedded computing systems? PCs are widely used and provide a very flexible programming environment. Components of PCs are, in fact, used in many embedded computing systems. But several factors keep us from using the stock PC as the universal embedded computing platform.
Real time
First, real-time performance requirements often drive us to different architectures. As we will see later in the book, real-time performance is often best achieved by multiprocessors.
Low power and low cost
Second, low power and low cost also drive us away from PC architectures and toward multiprocessors. Personal computers are designed to satisfy a broad mix of computing requirements and to be very flexible. Those features increase the complexity and price of the components. They also cause the processor and other components to use more energy to perform a given function. Custom embedded systems that are designed for an application, such as a cell phone, burn several orders of magnitude less power than do PCs with equivalent computational performance, and they are considerably less expensive as well.
Smartphones as platforms
The smartphone is an important computing platform. Because several hundred million smartphones are sold each year, a great deal of effort is put into designing them to be fast, low power, and cheap. Cell phones operate on batteries, so they must be very power efficient. They must also perform huge amounts of computation in real time. Not only are cell phones taking over some PC-oriented tasks, such as email and Web browsing, but the components of the cell phone can also be used to build non-cell-phone systems that are very energy efficient for certain classes of applications.
1.2.4 Cyber-Physical Systems
A cyber-physical system is one that combines physical devices, known as the plant, with computers that control the plant. The embedded computer is the cyber-part of the cyber-physical system. We can, in general, make certain trade-offs between the design of the control of the plant and the computational system that implements that control. For example, we may in fact be able to miss certain deadlines for issuing control commands if the plant is not close to going unstable. However, in this book we will concentrate on the cyber side and consider how to design embedded computers given the specifications on timing, power, and so on taken from the complete cyber-physical system.
Computing as a physical act
Even though we think of the cyber side as distinct, remember that computing is a physical act. Although PCs have trained us to think about computers as purveyors of abstract information, those computers in fact do their work by moving electrons and doing work. This is the fundamental reason why programs take time to finish, why they consume energy, and so on.
Physics of software
A central subject of this book is what we might call the physics of software. Software performance and energy consumption are very important properties when we are connecting our embedded computers to the real world. We need to understand the sources of performance and power consumption if we are to be able to design programs that meet our application’s goals. Luckily, we don’t have to optimize our programs by pushing around electrons. In many cases, we can make very high-level decisions about the structure of our programs to greatly improve their real-time performance and power consumption. As much as possible, we want to make computing abstractions work for us as we work on the physics of our software systems.
1.2.5 Challenges in Embedded Computing System Design
External constraints are one important source of difficulty in embedded system design. Let’s consider some important problems that must be taken into account in embedded system design.
• How much hardware do we need? We have a great deal of control over the amount of computing power we apply to our problem. Not only can we select the type of microprocessor used, we can select the amount of memory, the peripheral devices, and more. Because we often must meet both performance deadlines and manufacturing cost constraints, the choice of hardware is important—too little hardware and the system fails to meet its deadlines, too much hardware and it becomes too expensive.
• How do we meet deadlines? The brute force way of meeting a deadline is to speed up the hardware so that the program runs faster. Of course, that makes the system more expensive. It is also entirely possible that increasing the CPU clock rate may not make enough difference to execution time because the program’s speed may be limited by the memory system.
• How do we minimize power consumption? In battery-powered applications, power consumption is extremely important. Even in nonbattery applications, excessive power consumption can increase heat dissipation. One way to make a digital system consume less power is to make it run more slowly, but naively slowing down the system can obviously lead to missed deadlines. Careful design is required to slow down the noncritical parts of the machine for power consumption while still meeting necessary performance goals.
• How do we design for upgradeability? The hardware platform may be used over several product generations, or for several different versions of a product in the same generation, with few or no changes. However, we want to be able to add features by changing software. How can we design a machine that will provide the required performance for software that we haven’t yet written?
• Does it really work? Reliability is always important when selling products—customers rightly expect that products they buy will work. Reliability is especially important in some applications, such as safety-critical systems. If we wait until we have a running system and try to eliminate the bugs, we will be too late—we won’t find enough bugs, it will be too expensive to fix them, and it will take too long as well. Another set of challenges comes from the characteristics of the components and systems themselves. If workstation programming is like assembling a machine on a bench, then embedded system design is often more like working on a car—cramped, delicate, and difficult.
Let’s consider some ways in which the nature of embedded computing machines makes their design more difficult.
• Complex testing: Exercising an embedded system is generally more difficult than typing in some data. We may have to run a real machine in order to generate the proper data. The timing of data is often important, meaning that we cannot separate the testing of an embedded computer from the machine in which it is embedded.
• Limited observability and controllability: Embedded computing systems usually do not come with keyboards and screens. This makes it more difficult to see what is going on and to affect the system’s operation. We may be forced to watch the values of electrical signals on the microprocessor bus, for example, to know what is going on inside the system. Moreover, in real-time applications we may not be able to easily stop the system to see what is going on inside.
• Restricted development environments: The development environments for embedded systems (the tools used to develop software and hardware) are often much more limited than those available for PCs and workstations. We generally compile code on one type of machine, such as a PC, and download it onto the embedded system. To debug the code, we must usually rely on programs that run on the PC or workstation and then look inside the embedded system.
1.2.6 Performance of Embedded Computing Systems
Performance in general-purpose computing
When we talk about performance when writing programs for our PC, what do we really mean? Most programmers have a fairly vague notion of performance—they want their program to run “fast enough” and they may be worried about the asymptotic complexity of their program. Most general-purpose programmers use no tools that are designed to help them improve the performance of their programs.
Performance in embedded computing
Embedded system designers, in contrast, have a very clear performance goal in mind—their program must meet its deadline. At the heart of embedded computing is real-time computing, which is the science and art of programming to deadlines. The program receives its input data; the deadline is the time at which a computation must be finished. If the program doesn’t produce the required output by the deadline, then the program doesn’t work, even if the output that it eventually produces is functionally correct.
Understanding real-time performance
This notion of deadline-driven programming is at once simple and demanding. It isn’t easy to determine whether a large, complex program running on a sophisticated microprocessor will meet its deadline. We need tools to help us analyze the real-time performance of embedded systems; we also need to adopt programming disciplines and styles that make it possible to analyze these programs.
In order to understand the real-time behavior of an embedded computing system, we have to analyze the system at several different levels of abstraction. As we move through this book, we will work our way up from the lowest layers that describe components of the system up through the highest layers that describe the complete system. Those layers include:
• CPU: The CPU clearly influences the behavior of the program, particularly when the CPU is a pipelined processor with a cache.
• Platform: The platform includes the bus and I/O devices. The platform components that surround the CPU are responsible for feeding the CPU and can dramatically affect its performance.
• Program: Programs are very large and the CPU sees only a small window of the program at a time. We must consider the structure of the entire program to determine its overall behavior.
• Task: We generally run several programs simultaneously on a CPU, creating a multitasking system. The tasks interact with each other in ways that have profound implications for performance.
• Multiprocessor: Many embedded systems have more than one processor—they may include multiple programmable CPUs as well as accelerators. Once again, the interaction between these processors adds yet more complexity to the analysis of overall system performance.