
4.2 Basic Computing Platforms
While some embedded systems require sophisticated platforms, many can be built around the variations of a generic computer system ranging from 4-bit microprocessors through complex systems-on-chips. The platform provides the environment in which we can develop our embedded application. It encompasses both hardware and software components—one without the other is generally not very useful.
4.2.1 Platform Hardware Components
We are familiar with the CPU and memory as an idealized computer system. A practical computer needs additional components. As shown in Figure 4.1, a typical computing platform includes several major hardware components:
• The CPU provides basic computational facilities.
• RAM is used for program and data storage.
• ROM holds the boot program and some permanent data.
• A DMA controller provides direct memory access capabilities.
• Timers are used by the operating system for a variety of purposes.
• A high-speed bus, connected to the CPU bus through a bridge, allows fast devices to communicate efficiently with the rest of the system.
• A low-speed bus provides an inexpensive way to connect simpler devices and may be necessary for backward compatibility as well.

Figure 4.1 Hardware architecture of a typical computing platform.
Buses
The bus provides a common connection between all the components in the computer: the CPU, memories, and I/O devices. We will discuss buses in more detail in Section 4.3; the bus transmits addresses, data, and control information so that one device on the bus can read or write another device.
While very simple systems will have only one bus, more complex platforms may have several buses. Buses are often classified by their overall performance: low-speed, high-speed, etc. Multiple buses serve two purposes. First, devices on different buses will interact much less than those on the same bus. Dividing the devices between buses can help reduce the overall load and increase the utilization of the buses. Second, low-speed buses usually provide simpler and cheaper interfaces than do high-speed buses. A low-speed device may not benefit from the effort required to connect it to a high-speed bus.
A wide range of buses are used in computer systems. The Universal Serial Bus (USB), for example, is a bus that uses a small bundle of serial connections. For a serial bus, USB provides high performance. However, complex buses such as PCI may use many parallel connections and other techniques to provide higher absolute performance.
Access patterns
Data transfers may occur between many pairs of components: CPU to/from memory, CPU to/from I/O device, memory to memory, or I/O to I/O device. Because the bus connects all these components (possibly through a bridge), it can mediate all types of transfers. However, the basic data transfer requires executing instructions on the CPU. We can use a direct memory access (DMA) unit to offload some of the work of basic transfers. We will discuss DMA in more detail in Section 4.3.
Single-chip platforms
We can also put all the components for a basic computing platform on a single chip. A single-chip platform makes the development of certain types of embedded systems much easier, providing the rich software development of a PC with the low cost of a single-chip hardware platform. The ability to integrate a CPU and devices on a single chip has allowed manufacturers to provide single-chip systems that do not conform to board-level standards.
Microcontrollers
The term microcontroller refers to a single chip that includes a CPU, memory, and I/O devices. The term was originally used for platforms based on small 4-bit and 8-bit processors but can also refer to single-chip systems using large processors as well.
The next two examples look at two different single-chip systems. Application Example 4.1 looks at the PIC16F882 while Application Example 4.2 describes the Intel StrongARM SA-1100.
Application Example 4.1 System Organization of the PIC16F882
Here is the block diagram of the PIC16F882 (as well as the 883 and 886) microcontroller [Mic09]:
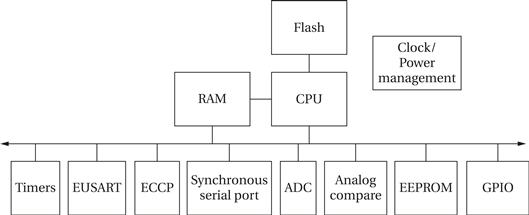
PIC is a Harvard architecture; the flash memory used for instructions is accessible only to the CPU. The flash memory can be programmed using separate mechanisms. The microcontroller includes a number of devices: timers, a universal synchronous/asynchronous receiver/transmitter (EUSART); capture-and-compare (ECCP) modules; a master synchronous serial port; an analog-to-digital converter (ADC); analog comparators and references; an electrically erasable PROM (EEPROM); and general-purpose I/O (GPIO).
Application Example 4.2 System Organization of the Intel StrongARM SA-1100 and SA-1111
The StrongARM SA-1100 provides a number of functions besides the ARM CPU:

The chip contains two on-chip buses: a high-speed system bus and a lower-speed peripheral bus. The chip also uses two different clocks. A 3.686-MHz clock is used to drive the CPU and high-speed peripherals, and a 32.768-kHz clock is an input to the system control module. The system control module contains the following peripheral devices:
The 32.768-kHz clock’s frequency is chosen to be useful in timing real-time events. The slower clock is also used by the power manager to provide continued operation of the manager at a lower clock rate and therefore lower power consumption.
The SA-1111 is a companion chip that provides a suite of I/O functions. It connects to the SA-1100 through its system bus and provides several functions: a USB host controller; PS/2 ports for keyboards, mice, and so on; a PCMCIA interface; pulse-width modulation outputs; a serial port for digital audio; and an SSP serial port for telecom interfacing.
4.2.2 Platform Software Components
Hardware and software are inseparable—each needs the other to perform its function. Much of the software in an embedded system will come from outside sources. Some software components may come from third parties. Hardware vendors generally provide a basic set of software platform components to encourage use of their hardware. These components range across many layers of abstraction.
Layer diagrams are often used to describe the relationships between different software components in a system. Figure 4.2 shows a layer diagram for an embedded system. The hardware abstraction layer (HAL) provides a basic level of abstraction from the hardware. Device drivers often use the HAL to simplify their structure. Similarly, the power management module must have low-level access to hardware. The operating system and file system provide the basic abstractions required to build complex applications. Because many embedded systems are algorithm-intensive, we often make use of library routines to perform complex kernel functions. These routines may be developed internally and reused or, in many cases, they come from the manufacturer and are heavily optimized for the hardware platform. The application makes use of all these layers, either directly or indirectly.

Figure 4.2 Software layer diagram for an embedded system.