9.2 DEFINITION OF z-TRANSFORM
The one-sided z-transform of a discrete time signal x(n) is given by the relation [78, 79]
(9.2)
![]()
where z is a complex number. We can write the z-transform in polynomial form:
(9.3)
![]()
We say that the signal x(n) in the time domain has an equivalent representation, X (z), in the z-domain.
The z-transform X (z) of the sequence x(n) is a polynomial of the different powers of z−1, such that x(i) is the coefficient of the ith power of z−1.
An important property of the z-transform is that the quantity z−1 in the z-domain corresponds to a time shift of 1 in the time domain. To prove this, we multiply X(z) by z−1 to obtain a new signal, Y(z):
(9.4)
![]()
The time domain representation y(n) is found by using the coefficients of the above polynomial. At time i, we find that
(9.5)
![]()
In effect, the term z−1 delayed each sample by one time step. We can write the relation between x(n) and y(n) as follows:

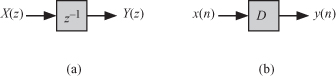
Multiplication by z−1 has the effect of delaying the signal by one time step. We consider the term z−1 as a unit delay operator, and the relation between the signal x(n) and y(n) could be graphically shown in Fig. 9.1, where the box labeled z−1 denotes the unit delay. In real signals, the unit delay block is implemented by an edge-triggered D-type flip-flop when signal x is single-bit data or it could be a register if the signal x has multiple bits.
Figure 9.1 Schematic for introducing unit delay to a signal. (a) z-domain notation. (b) Time domain notation.