
]>
Appendix 1A: Vector Formulas and Coordinate Systems
1A.1Vector Transformations
This appendix closely follows the development of the materials given in [1], which is a standard development used in many textbooks. The three coordinate systems, (a) rectangular, (b) cylindrical, and (c) spherical, are shown in Figure 1A.1.
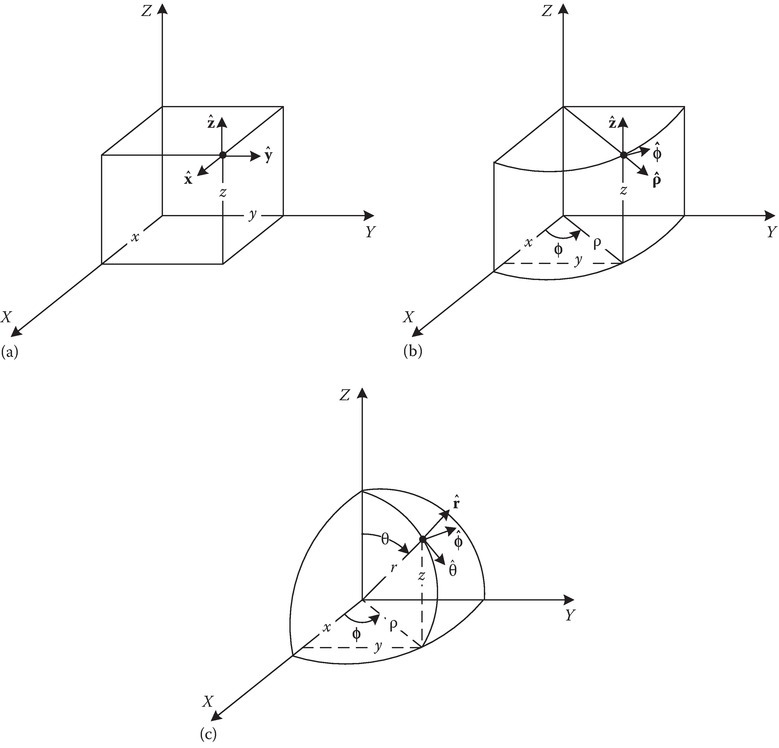
FIGURE 1A.1
(a) Rectangular, (b) cylindrical, and (c) spherical coordinate systems.
1A.1.1Rectangular to Cylindrical (and Cylindrical to Rectangular) Transformation
Referring to Figure 1A.1b, the coordinate transformation from rectangular (x, y, z) to cylindrical (ρ, ϕ, z) coordinates is given by
In rectangular coordinates, a vector A is written as
where ˆx,ˆy,andˆz
where ˆρ,ˆφ,andˆz
and therefore,
thus
This can be expressed in the matrix form as
where
is the transformation matrix for rectangular to cylindrical components. Since [A]rc is an orthonormal matrix (its inverse is equal to its transpose), the transformation matrix from cylindrical to rectangular components can be written as
1A.1.2Cylindrical to Spherical (and Spherical to Cylindrical) Transformation
From Figure 1A.1c, it can be seen that the cylindrical and spherical coordinates are related by
In a manner similar to the previous section, it can be shown that
therefore
or in matrix notation
The [A]cs matrix is orthonormal and so its inverse is given by
and the spherical to cylindrical transformation is accomplished by
1A.1.3Rectangular to Spherical (and Spherical to Rectangular) Transformation
From Figure 1A.1c, it can be seen that the rectangular and spherical coordinates are related by
or
and the spherical and rectangular components by
In the matrix form,
The [A]rs matrix is orthonormal and so its inverse is given by
and the spherical to rectangular transformation is accomplished by
1A.2Vector Differential Operators
The differential operators normally include gradient of a scalar (∇ψ), divergence of a vector (∇·A), curl of a vector (∇ × A), Laplacian of a scalar (∇ 2ψ), and Laplacian of a vector (∇ 2A). These will be shown in rectangular, cylindrical, and spherical coordinates as given below.
1A.2.1Rectangular Coordinates
1A.2.2Cylindrical Coordinates
1A.2.3Spherical Coordinates
1A.3Vector Identities
1A.3.1Addition and Multiplication
1A.3.2Differentiation
1A.3.3Integration
Reference
- 1.Balanis, C. A., Advanced Engineering Electromagnetics, Wiley, New York, 1989.