
5.4 Mechanical Vibrations
The motion of a mass attached to a spring serves as a relatively simple example of the vibrations that occur in more complex mechanical systems. For many such systems, the analysis of these vibrations is a problem in the solution of linear differential equations with constant coefficients.
We consider a body of mass m attached to one end of an ordinary spring that resists compression as well as stretching; the other end of the spring is attached to a fixed wall, as shown in Fig. 5.4.1. Assume that the body rests on a frictionless horizontal plane, so that it can move only back and forth as the spring compresses and stretches. Denote by x the distance of the body from its equilibrium position—its position when the spring is unstretched. We take x>0

FIGURE 5.4.1.
A mass–spring–dashpot system.
According to Hooke’s law, the restorative force FS
The positive constant of proportionality k is called the spring constant. Note that FS
Figure 5.4.1 shows the mass attached to a dashpot—a device, like a shock absorber, that provides a force directed opposite to the instantaneous direction of motion of the mass m. We assume the dashpot is so designed that this force FR
The positive constant c is the damping constant of the dashpot. More generally, we may regard Eq. (2) as specifying frictional forces in our system (including air resistance to the motion of m).
If, in addition to the forces FS
we obtain the second-order linear differential equation
![]()
that governs the motion of the mass.
If there is no dashpot (and we ignore all frictional forces), then we set c=0
![]()
describes free motion of a mass on a spring with dashpot but with no external forces applied. We will defer discussion of forced motion until Section 5.6.
For an alternative example, we might attach the mass to the lower end of a spring that is suspended vertically from a fixed support, as in Fig. 5.4.2. In this case the weight W=mg

FIGURE 5.4.2.
A mass suspended vertically from a spring.
if we include damping and external forces (meaning those other than gravity).
The Simple Pendulum
The importance of the differential equation that appears in Eqs. (3) and (5) stems from the fact that it describes the motion of many other simple mechanical systems. For example, a simple pendulum consists of a mass m swinging back and forth on the end of a string (or better, a massless rod) of length L, as shown in Fig. 5.4.3. We may specify the position of the mass at time t by giving the counterclockwise angle θ=θ(t)

FIGURE 5.4.3.
The simple pendulum.
The distance along the circular arc from 0 to m is s=Lθ,
We next choose as reference point the lowest point O reached by the mass (see Fig. 5.4.3). Then its potential energy V is the product of its weight mg and its vertical height h=L(1−cos θ)
The fact that the sum of T and V is a constant C therefore gives
We differentiate both sides of this identity with respect to t to obtain
so
after removal of the common factor mL2(dθ/dt).
Now recall that if θ
where k=g/L.
In the remainder of this section, we first analyze free undamped motion and then free damped motion.
Free Undamped Motion
If we have only a mass on a spring, with neither damping nor external force, then Eq. (3) takes the simpler form
It is convenient to define
and rewrite Eq. (8) as
The general solution of Eq. (8′) is
To analyze the motion described by this solution, we choose constants C and α
as indicated in Fig. 5.4.4. Note that, although tanα=B/A,

FIGURE 5.4.4.
The angle α
where tan−1(B/A)
In any event, from (10) and (11) we get
With the aid of the cosine addition formula, we find that
Thus the mass oscillates to and fro about its equilibrium position with
Amplitude C,
Circular frequency ω0
ω0 , andPhase angle α
α .
Such motion is called simple harmonic motion.
If time t is measured in seconds, the circular frequency ω0
seconds; its frequency is
in hertz (Hz), which measures the number of complete cycles per second. Note that frequency is measured in cycles per second, whereas circular frequency has the dimensions of radians per second.

FIGURE 5.4.5.
Simple harmonic motion.
A typical graph of a simple harmonic position function
is shown in Fig. 5.4.5, where the geometric significance of the amplitude C, the period T, and the time lag
are indicated.
If the initial position x(0)=x0
Example 1
Undamped mass-spring system A body with mass m=12
Solution
The spring constant is k=(100N)/(2m)=50
Consequently, the circular frequency of the resulting simple harmonic motion of the body will be ω0=√100=10
and with frequency
We now impose the initial conditions x(0)=1
It follows readily that A=1
Hence its amplitude of motion is
To find the time lag, we write
where the phase angle α
Hence α
and the time lag of the motion is
With the amplitude and approximate phase angle shown explicitly, the position function of the body takes the form
and its graph is shown in Fig. 5.4.6.

FIGURE 5.4.6.
Graph of the position function x(t)≈C cos(ω0t−α)
Free Damped Motion
With damping but no external force, the differential equation we have been studying takes the form mx″+cx′+kx=0;
where ω0=√k/m
The characteristic equation r2+2pr+ω20=0
that depend on the sign of
The critical damping ccr
Overdamped Case: c>ccr (c2>4k m).
It is easy to see that x(t)→0

FIGURE 5.4.7.
Overdamped motion: x(t)=c1er1t+c2er2t
Critically Damped Case: c=ccr (c2=4k m).
Because e−pt>0

FIGURE 5.4.8.
Critically damped motion: x(t)=(c1+c2t)e−pt
Underdamped Case: c<ccr (c2<4k m).
![]()
where
Using the cosine addition formula as in the derivation of Eq. (12), we may rewrite Eq. (20) as
so
![]()
where
![]()
The solution in (21) represents exponentially damped oscillations of the body around its equilibrium position. The graph of x(t) lies between the “amplitude envelope” curves x=−Ce−pt

FIGURE 5.4.9.
Underdamped oscillations: x(t)=Ce−ptcos(ω1t−α)
It exponentially damps the oscillations, in accord with the time-varying amplitude.
It slows the motion; that is, the dashpot decreases the frequency of the motion.
As the following example illustrates, damping typically also delays the motion further—that is, increases the time lag—as compared with undamped motion with the same initial conditions.
Example 2
Damped system The mass and spring of Example 1 are now attached also to a dashpot that provides 1 N of resistance for each meter per second of velocity. The mass is set in motion with the same initial position x(0)=1
Solution
Rather than memorizing the various formulas given in the preceding discussion, it is better practice in a particular case to set up the differential equation and then solve it directly. Recall that m=12
The characteristic equation r2+2r+100=(r+1)2+99=0
Consequently, the new circular (pseudo)frequency is ω1=√99≈9.9499
and
(as compared with T≈0.6283<T1
We now impose the initial conditions x(0)=1
It follows that
whence we find that A=1
Hence its time-varying amplitude of motion is
We therefore write
where the phase angle α1
Hence α1
and the time lag of the motion is
(as compared with δ≈0.5820<δ1
and its graph is the damped exponential that is shown in Fig. 5.4.10 (in comparison with the undamped oscillations of Example 1).
From (24) we see that the mass passes through its equilibrium position x=0
that is, when
We see similarly that the undamped mass of Example 1 passes through equilibrium when
The following table compares the first four values t1,t2,t3,t4
| n | 1 | 2 | 3 | 4 |
| tn |
0.1107 | 0.4249 | 0.7390 | 1.0532 |
| tn |
0.1195 | 0.4352 | 0.7509 | 1.0667 |
Accordingly, in Fig. 5.4.11 (where only the first three equilibrium passages are shown) we see the damped oscillations lagging slightly behind the undamped ones.

FIGURE 5.4.10.
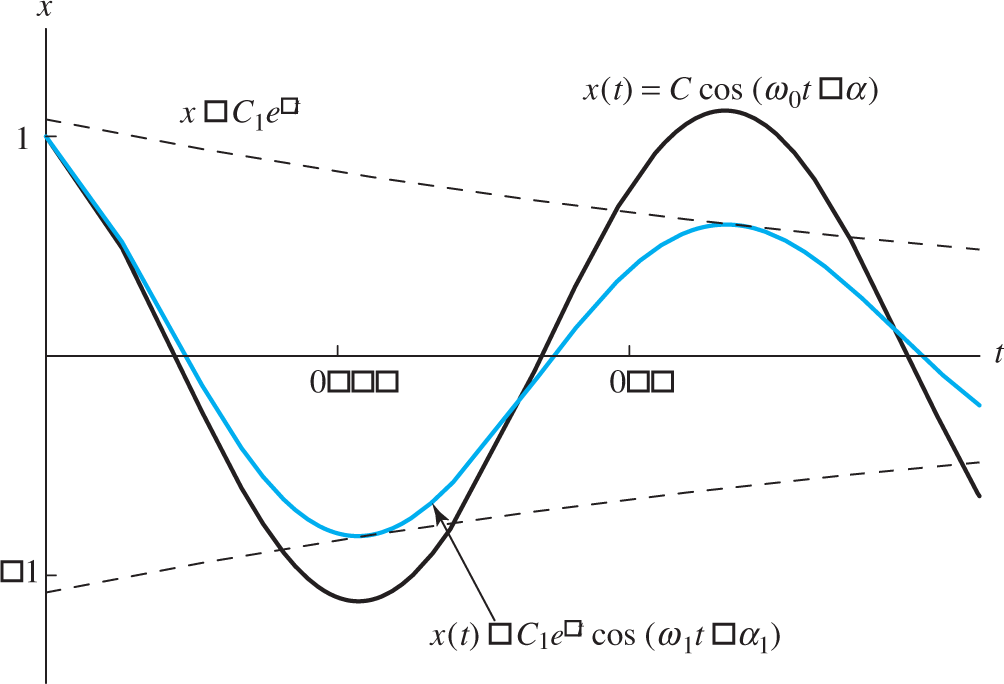
FIGURE 5.4.11.
Graphs on the interval 0≤t≤0.8
5.4 Problems
Determine the period and frequency of the simple harmonic motion of a 4-kg mass on the end of a spring with spring constant 16 N/m.
Determine the period and frequency of the simple harmonic motion of a body of mass 0.75 kg
0.75 kg on the end of a spring with spring constant 48 N/m.A mass of 3 kg is attached to the end of a spring that is stretched 20 cm by a force of 15 N. It is set in motion with initial position x0=0
x0=0 and initial velocity v0=−10 m/s.v0=−10 m/s. Find the amplitude, period, and frequency of the resulting motion.A body with mass 250 g is attached to the end of a spring that is stretched 25 cm by a force of 9 N. At time t=0
t=0 the body is pulled 1 m to the right, stretching the spring, and set in motion with an initial velocity of 5 m/s5 m/s to the left. (a) Find x(t) in the form Ccos(ω0t−α).Ccos(ω0t−α). (b) Find the amplitude and period of motion of the body.
Simple Pendulum
In Problems 5 through 8, assume that the differential equation of a simple pendulum of length L is Lθ″+gθ=0,
Two pendulums are of lengths L1
L1 and L2L2 and—when located at the respective distances R1R1 and R2R2 from the center of the earth—have periods p1p1 and p2.p2. Show thatp1p2=R1√L1R2√L2.p1p2=R1L1−−√R2L2−−√. A certain pendulum keeps perfect time in Paris, where the radius of the earth is R=3956
R=3956 (mi). But this clock loses 2 min 40 s per day at a location on the equator. Use the result of Problem 5 to find the amount of the equatorial bulge of the earth.A pendulum of length 100.10 in., located at a point at sea level where the radius of the earth is R=3960
R=3960 (mi), has the same period as does a pendulum of length 100.00 in. atop a nearby mountain. Use the result of Problem 5 to find the height of the mountain.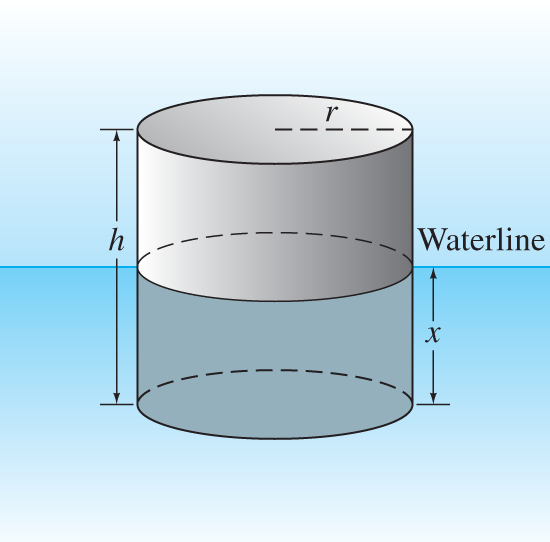
FIGURE 5.4.12.
The buoy of Problem 10.
Most grandfather clocks have pendulums with adjustable lengths. One such clock loses 10 min per day when the length of its pendulum is 30 in. With what length pendulum will this clock keep perfect time?
Derive Eq. (5) describing the motion of a mass attached to the bottom of a vertically suspended spring. (Suggestion: First denote by x(t) the displacement of the mass below the unstretched position of the spring; set up the differential equation for x. Then substitute y=x−s0
y=x−s0 in this differential equation.)Floating buoy Consider a floating cylindrical buoy with radius r, height h, and uniform density ρ≦0.5
ρ≦0.5 (recall that the density of water is 1 g/cm31 g/cm3 ). The buoy is initially suspended at rest with its bottom at the top surface of the water and is released at time t=0.t=0. Thereafter it is acted on by two forces: a downward gravitational force equal to its weight mg=ρπr2hg and (by Archimedes’ principle of buoyancy) an upward force equal to the weight πr2xg of water displaced, where x=x(t) is the depth of the bottom of the buoy beneath the surface at time t (Fig. 5.4.12). Assume that friction is negligible. Conclude that the buoy undergoes simple harmonic motion around its equilibrium position xe=ρh with period p=2π√ρh/g. Compute p and the amplitude of the motion if ρ=0.5 g/cm3, h=200 cm, and g=980 c m/s2.Floating buoy A cylindrical buoy weighing 100 lb (thus of mass m=3.125 slugs in ft-lb-s (fps)units) floats in water with its axis vertical (as in Problem 10). When depressed slightly and released, it oscillates up and down four times every 10 s. Find the radius of the buoy.
Hole through the earth Assume that the earth is a solid sphere of uniform density, with mass M and radius R=3960 (mi). For a particle of mass m within the earth at distance r from the center of the earth, the gravitational force attracting m toward the center is Fr=−GMrm/r2, where Mr is the mass of the part of the earth within a sphere of radius r (Fig. 5.4.13). (a) Show that Fr=−GMmr/R3.

FIGURE 5.4.13.
A mass m falling down a hole through the center of the earth (Problem 12).
(b) Now suppose that a small hole is drilled straight through the center of the earth, thus connecting two antipodal points on its surface. Let a particle of mass m be dropped at time t=0 into this hole with initial speed zero, and let r(t) be its distance from the center of the earth at time t, where we take r<0 when the mass is “below” the center of the earth. Conclude from Newton’s second law and part (a) that r″(t)=−k2r(t), where k2=GM/R3=g/R. (c) Take g=32.2 ft/s2, and conclude from part (b) that the particle undergoes simple harmonic motion back and forth between the ends of the hole, with a period of about 84 min. (d) Look up (or derive) the period of a satellite that just skims the surface of the earth; compare with the result in part (c). How do you explain the coincidence? Or is it a coincidence? (e) With what speed (in miles per hour) does the particle pass through the center of the earth? (f) Look up (or derive) the orbital velocity of a satellite that just skims the surface of the earth; compare with the result in part (e). How do you explain the coincidence? Or is it a coincidence?
Suppose that the mass in a mass–spring–dashpot system with m=10, c=9, and k=2 is set in motion with x(0)=0 and x′(0)=5. (a) Find the position function x(t) and show that its graph looks as indicated in Fig. 5.4.14. (b) Find how far the mass moves to the right before starting back toward the origin.
Suppose that the mass in a mass–spring–dashpot system with m=25, c=10, and k=226 is set in motion with x(0)=20 and x′(0)=41. (a) Find the position function x(t) and show that its graph looks as indicated in Fig. 5.4.15. (b) Find the pseudoperiod of the oscillations and the equations of the “envelope curves” that are dashed in the figure.
Free Damped Motion
The remaining problems in this section deal with free damped motion. In Problems 15 through 21, a mass m is attached to both a spring (with given spring constant k) and a dashpot (with given damping constant c). The mass is set in motion with initial position x0 and initial velocity v0. Find the position function x(t) and determine whether the motion is overdamped, critically damped, or underdamped. If it is underdamped, write the position function in the form x(t)=C1e−pt cos(ω1t−α1). Also, find the undamped position function u(t)=C0cos(ω0t−α0) that would result if the mass on the spring were set in motion with the same initial position and velocity, but with the dashpot disconnected (so c=0). Finally, construct a figure that illustrates the effect of damping by comparing the graphs of x(t) and u(t).

FIGURE 5.4.14.
The position function x(t) of Problem 13.
m=12, c=3, k=4; x0=2, v0=0
m=3, c=30, k=63; x0=2, v0=2
m=1, c=8, k=16; x0=5, v0=−10
m=2, c=12, k=50; x0=0, v0=−8
m=4, c=20, k=169; x0=4, v0=16
m=2, c=16, k=40; x0=5, v0=4
m=1, c=10, k=125; x0=6, v0=50
Vertical damped motion A 12-lb weight (mass m=0.375 slugs in fps units) is attached both to a vertically suspended spring that it stretches 6 in. and to a dashpot that provides 3 lb of resistance for every foot per second of velocity. (a) If the weight is pulled down 1 ft below its static equilibrium position and then released from rest at time t=0, find its position function x(t). (b) Find the frequency, time-varying amplitude, and phase angle of the motion.
Car suspension This problem deals with a highly simplified model of a car of weight 3200 lb (mass m=100 slugs in fps units). Assume that the suspension system acts like a single spring and its shock absorbers like a single dashpot, so that its vertical vibrations satisfy Eq. (4) with appropriate values of the coefficients. (a) Find the stiffness coefficient k of the spring if the car undergoes free vibrations at 80 cycles per minute (cycles/min) when its shock absorbers are disconnected. (b) With the shock absorbers connected, the car is set into vibration by driving it over a bump, and the resulting damped vibrations have a frequency of 78 cycles/min. After how long will the time-varying amplitude be 1% of its initial value?
Problems 24 through 34 deal with a mass–spring–dashpot system having position function x(t) satisfying Eq. (4). We write x0=x(0) and v0=x′(0) and recall that p=c/(2m), ω20=k/m, and ω21=ω20−p2. The system is critically damped, overdamped, or underdamped, as specified in each problem.

FIGURE 5.4.15.
The position function x(t) of Problem 14.
(Critically damped) Show in this case that
x(t)=(x0+v0t+px0t)e−pt.(Critically damped) Deduce from Problem 24 that the mass passes through x=0 at some instant t>0 if and only if x0 and v0+px0 have opposite signs.
(Critically damped) Deduce from Problem 24 that x(t) has a local maximum or minimum at some instant t>0 if and only if v0 and v0+px0 have the same sign.
(Overdamped) Show in this case that
x(t)=12γ[(v0−r2x0)er1t−(v0−r1x0)er2t],where r1,r2=−p±√p2−ω20 and γ=(r1−r2)/2>0.
(Overdamped) If x0=0, deduce from Problem 27 that
x(t)=v0γe−ptsinh γt.(Overdamped) Prove that in this case the mass can pass through its equilibrium position x=0 at most once.
(Underdamped) Show that in this case
x(t)=e−pt(x0 cos ω1t+v0+px0ω1sin ω1t).(Underdamped) If the damping constant c is small in comparison with √8mk, apply the binomial series to show that
ω1≈ω0(1−c28mk).(Underdamped) Show that the local maxima and minima of
x(t)=Ce−pt cos(ω1t−α)occur where
tan(ω1t−α)=−pω1.Conclude that t2−t1=2π/ω1 if two consecutive maxima occur at times t1 and t2.
(Underdamped) Let x1 and x2 be two consecutive local maximum values of x(t). Deduce from the result of Problem 32 that
lnx1x2=2πpω1.The constant Δ=2πp/ω1 is called the logarithmic decrement of the oscillation. Note also that c=mω1Δ/π because p=c/(2m).
Note: The result of Problem 33 provides an accurate method for measuring the viscosity of a fluid, which is an important parameter in fluid dynamics but is not easy to measure directly. According to Stokes’s drag law, a spherical body of radius a moving at a (relatively slow)speed through a fluid of viscosity μ experiences a resistive force FR=6πμav. Thus if a spherical mass on a spring is immersed in the fluid and set in motion, this drag resistance damps its oscillations with damping constant c=6πaμ. The frequency ω1 and logarithmic decrement Δ of the oscillations can be measured by direct observation. The final formula in Problem 33 then gives c and hence the viscosity of the fluid.
(Underdamped) A body weighing 100 lb (mass m=3.125 slugs in fps units) is oscillating attached to a spring and a dashpot. Its first two maximum displacements of 6.73 in. and 1.46 in. are observed to occur at times 0.34 s and 1.17 s, respectively. Compute the damping constant (in pound-seconds per foot) and spring constant (in pounds per foot).
Differential Equations and Determinism
Given a mass m, a dashpot constant c, and a spring constant k, Theorem 2 of Section 5.1 implies that the equation
has a unique solution for t≧0 satisfying given initial conditions x(0)=x0, x′(0)=v0. Thus the future motion of an ideal mass–spring–dashpot system is completely determined by the differential equation and the initial conditions. Of course in a real physical system it is impossible to measure the parameters m, c, and k precisely. Problems 35 through 38 explore the resulting uncertainty in predicting the future behavior of a physical system.
Suppose that m=1, c=2, and k=1 in Eq. (26). Show that the solution with x(0)=0 and x′(0)=1 is
x1(t)=te−t.Suppose that m=1 and c=2 but k=1−10−2n. Show that the solution of Eq. (26) with x(0)=0 and x′(0)=1 is
x2(t)=10ne−t sinh 10−nt.Suppose that m=1 and c=2 but that k=1+10−2n. Show that the solution of Eq. (26) with x(0)=0 and x′(0)=1 is
x3(t)=10ne−t sin 10−nt.Whereas the graphs of x1(t) and x2(t) resemble those shown in Figs. 5.4.7 and 5.4.8, the graph of x3(t) exhibits damped oscillations like those illustrated in Fig. 5.4.9, but with a very long pseudoperiod. Nevertheless, show that for each fixed t>0 it is true that
limn→∞x2(t)=limn→∞x3(t)=x1(t).Conclude that on a given finite time interval the three solutions are in “practical” agreement if n is sufficiently large.