
10.5 Periodic and Piecewise Continuous Input Functions
Mathematical models of mechanical or electrical systems often involve functions with discontinuities corresponding to external forces that are turned abruptly on or off. One such simple on–off function is the unit step function that we introduced in Section 10.1. Recall that the unit step function at t=a
The notation ua(t)
In Example 8 of Section 10.1 we saw that if a≧0,

FIGURE 10.5.1.
The graph of the unit step function at t=a.
![]()
Because L{u(t)}=1/s,
Note that
Thus Theorem 1 implies that L−1{e−asF(s)}

FIGURE 10.5.2.
Translation of f(t) a units to the right.
Proof of Theorem 1:
From the definition of L{f(t)},
The substitution t=τ+a
From Eq. (4) we see that this is the same as
because u(t−a)f(t−a)=0
Example 1
With f(t)=12t2,
Example 2
Find L{g(t)}
Solution
Before applying Theorem 1, we must first write g(t) in the form u(t−3)f(t−3).
so now Theorem 1 yields

FIGURE 10.5.3.
The graph of the inverse transform of Example 1.
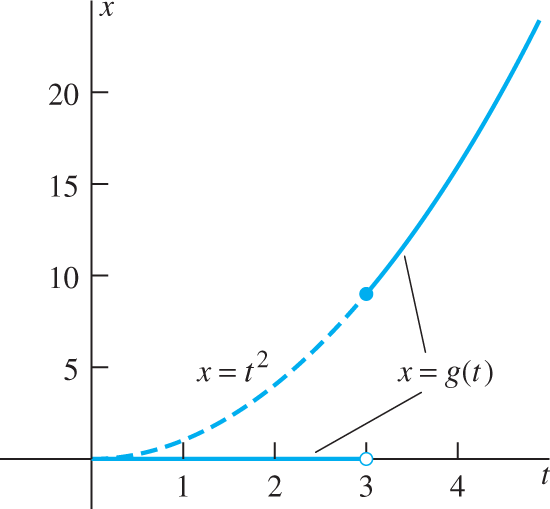
FIGURE 10.5.4.
The graph of the function g(t) of Example 2.
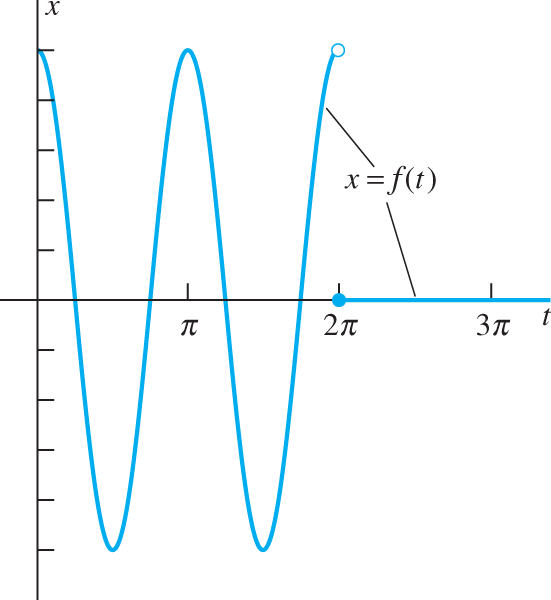
FIGURE 10.5.5.
The function f(t) of Examples 3 and 4.
Example 3
Find L{f(t)}
Solution
We note first that
because of the periodicity of the cosine function. Hence Theorem 1 gives
Example 4
Discontinuous forcing A mass that weighs 32 lb (mass m=1
Solution
We need to solve the initial value problem
where f(t) is the function of Example 3. The transformed equation is
so
Because
by Eq. (16) of Section 10.3, it follows from Theorem 1 that
If we separate the cases t<2π
As indicated by the graph of x(t) shown in Fig. 10.5.6, the mass oscillates with circular frequency ω=2

FIGURE 10.5.6.
The graph of the function x(t) of Example 4.
If we were to attack Example 4 with the methods of Chapter 5, we would need to solve one problem for the interval 0≦t<2π
Transforms of Periodic Functions
Periodic forcing functions in practical mechanical or electrical systems often are more complicated than pure sines or cosines. The nonconstant function f(t) defined for t≧0
for all t≧0.

FIGURE 10.5.7.
The graph of a function with period p.
Proof:
The definition of the Laplace transform gives
The substitution t=τ+np
because f(τ+np)=f(τ)
Consequently,
We use the geometric series
with x=e−ps<1
The principal advantage of Theorem 2 is that it enables us to find the Laplace transform of a periodic function without the necessity of an explicit evaluation of an improper integral.
Example 5
Figure 10.5.8 shows the graph of the square wave function f(t)=(−1)〚t/a〛
Therefore,

FIGURE 10.5.8.
The graph of the square wave function of Example 5.
Example 6
Figure 10.5.9 shows the graph of a triangular wave function g(t) of period p=2a.

FIGURE 10.5.9.
The graph of the triangular wave function of Example 6.
Example 7
Square wave forcing Consider a mass–spring–dashpot system with m=1, c=4,
Solution
The initial value problem is
The transformed equation is

FIGURE 10.5.10.
The graph of the external force function of Example 7.
From Example 5 with a=π
so that
Substitution of Eq. (10) in Eq. (9) yields
From the transform in Eq. (8) of Section 10.3, we get
so by Theorem 2 of Section 10.2 we have
Using a tabulated formula for ∫eat sin bt dt,
where
Now we apply Theorem 1 to find the inverse transform of the right-hand term in Eq. (11). The result is
and we note that for any fixed value of t the sum in Eq. (14) is finite. Moreover,
Therefore,
Hence if 0<t<π,
If π<t<2π,
If 2π<t<3π,
The general expression for nπ<t<(n+1)π
which we obtained with the aid of the familiar formula for the sum of a finite geometric progression. A rearrangement of Eq. (16) finally gives, with the aid of Eq. (13),
for nπ<t<(n+1)π.
The last two terms in Eq. (17) give the steady periodic solution xsp.
Figure 10.5.11 shows the graph of xsp(t).

FIGURE 10.5.11.
The graph of the steady periodic solution for Example 7; note the “periodically damped” oscillations with frequency four times that of the imposed force.
10.5 Problems
Find the inverse Laplace transform f(t) of each function given in Problems 1 through 10. Then sketch the graph of f.
F(s)=e−3ss2
F(s)=e−3ss2 F(s)=e−s−e−3ss2
F(s)=e−s−e−3ss2 F(s)=e−ss+2
F(s)=e−ss+2 F(s)=e−s−e2−2ss−1
F(s)=e−s−e2−2ss−1 F(s)=e−πss2+1
F(s)=e−πss2+1 F(s)=se−ss2+π2
F(s)=se−ss2+π2 F(s)=1−e−2πss2+1
F(s)=1−e−2πss2+1 F(s)=s(1−e−2s)s2+π2
F(s)=s(1−e−2s)s2+π2 F(s)=s(1+e−3s)s2+π2
F(s)=s(1+e−3s)s2+π2 F(s)=2s(e−πs−e−2πs)s2+4
F(s)=2s(e−πs−e−2πs)s2+4
Find the Laplace transforms of the functions given in Problems 11 through 22.
f(t)=2
f(t)=2 if 0≦t<3;0≦t<3; f(t)=0f(t)=0 if t≧3t≧3 f(t)=1
f(t)=1 if 1≦t≦4;1≦t≦4; f(t)=0f(t)=0 if t<1t<1 or if t>4t>4 f(t)=sin t
f(t)=sin t if 0≦t≦2π;0≦t≦2π; f(t)=0f(t)=0 if t>2πt>2π f(t)=cos πt
f(t)=cos πt if 0≦t≦2;0≦t≦2; f(t)=0f(t)=0 if t>2t>2 f(t)=sin t
f(t)=sin t if 0≦t≦3π;0≦t≦3π; f(t)=0f(t)=0 if t>3πt>3π f(t)=sin 2t
f(t)=sin 2t if π≦t≦2π;π≦t≦2π; f(t)=0f(t)=0 if t<πt<π or if t>2πt>2π f(t)=sin πt
f(t)=sin πt if 2≦t≦3;2≦t≦3; f(t)=0f(t)=0 if t<2t<2 or if t>3t>3 f(t)=cos12πt
f(t)=cos12πt if 3≦t≦53≦t≦5 ; f(t)=0f(t)=0 if t<3t<3 or if t>5t>5 f(t)=0
f(t)=0 if t<1;t<1; f(t)=tf(t)=t if t≧1t≧1 f(t)=t
f(t)=t if t≦1;t≦1; f(t)=1f(t)=1 if t>1t>1 f(t)=t
f(t)=t if t≦1;t≦1; f(t)=2−tf(t)=2−t if 1≦t≦2;1≦t≦2; f(t)=0f(t)=0 if t>2t>2 f(t)=t3
f(t)=t3 if 1≦t≦2;1≦t≦2; f(t)=0f(t)=0 if t<1t<1 or if t>2t>2 Apply Theorem 2 with p=1
p=1 to verify that L{1}=1/s.L{1}=1/s. Apply Theorem 2 to verify that L{cos kt}=s/(s2+k2)
L{cos kt}=s/(s2+k2) .Apply Theorem 2 to show that the Laplace transform of the square wave function of Fig. 10.5.12 is
L{f(t)}=1s(1+e−as).L{f(t)}=1s(1+e−as). 
FIGURE 10.5.12.
The graph of the square wave function of Problem 25.
Apply Theorem 2 to show that the Laplace transform of the sawtooth function f(t) of Fig. 10.5.13 is
F(s)=1as2−e−ass(1−e−as).F(s)=1as2−e−ass(1−e−as). 
FIGURE 10.5.13.
The graph of the sawtooth function of Problem 26.
Let g(t) be the staircase function of Fig. 10.5.14. Show that g(t)=(t/a)−f(t),
g(t)=(t/a)−f(t), where f is the sawtooth function of Fig. 10.5.14, and hence deduce thatL{g(t)}=e−ass(1−e−as).L{g(t)}=e−ass(1−e−as). 
FIGURE 10.5.14.
The graph of the staircase function of Problem 27.
Suppose that f(t) is a periodic function of period 2a with f(t)=t
f(t)=t if 0≦t<a0≦t<a and f(t)=0f(t)=0 if a≦t<2a.a≦t<2a. Find L{f(t)}L{f(t)} .Suppose that f(t) is the half-wave rectification of sin kt,
sin kt, shown in Fig. 10.5.15. Show thatL{f(t)}=k(s2+k2)(1−e−πs/k).L{f(t)}=k(s2+k2)(1−e−πs/k). 
FIGURE 10.5.15.
The half-wave rectification of sin kt.
sin kt. Let g(t)=u(t−π/k)f(t−π/k),
g(t)=u(t−π/k)f(t−π/k), where f(t) is the function of Problem 29 and k>0.k>0. Note that h(t)=f(t)+g(t)h(t)=f(t)+g(t) is the full-wave rectification of sin ktsin kt shown in Fig. 10.5.16. Hence deduce from Problem 29 thatL{h(t)}=ks2+k2cothπs2k.L{h(t)}=ks2+k2cothπs2k. 
FIGURE 10.5.16.
The full-wave rectification of sin kt.
sin kt.
In Problems 31 through 35, the values of mass m, spring constant k, dashpot resistance c, and force f(t) are given for a mass–spring–dashpot system with external forcing function. Solve the initial value problem
and construct the graph of the position function x(t).
m=1, k=4, c=0;
m=1, k=4, c=0; f(t)=1f(t)=1 if 0≦t<π,0≦t<π, f(t)=0f(t)=0 if t≧πt≧π m=1, k=4, c=5;
m=1, k=4, c=5; f(t)=1f(t)=1 if 0≦t<2,0≦t<2, f(t)=0f(t)=0 if t≧2t≧2 m=1, k=9, c=0;
m=1, k=9, c=0; f(t)=sin tf(t)=sin t if 0≦t≦2π,0≦t≦2π, f(t)=0f(t)=0 if t>2πt>2π m=1, k=1, c=0;
m=1, k=1, c=0; f(t)=tf(t)=t if 0≦t<1,0≦t<1, f(t)=0f(t)=0 if t≧1t≧1 m=1, k=4, c=4;
m=1, k=4, c=4; f(t)=tf(t)=t if 0≦t≦2,0≦t≦2, f(t)=0f(t)=0 if t>2t>2
In Problems 36 and 37, a mass–spring–dashpot system with external force f(t) is described. Under the assumption that x(0)=x′(0)=0,
has the value +A
m=1, k=4, c=0;
m=1, k=4, c=0; f(t) is a square wave function with amplitude 4 and period 2π2π .m=1, k=10, c=2;
m=1, k=10, c=2; f(t) is a square wave function with amplitude 10 andperiod 2π2π .Suppose the function x(t) satisfies the initial value problem
mx″+cx′+kx=F(t), x(a)=b0, x′(a)=b1mx′′+cx'+kx=F(t), x(a)=b0, x'(a)=b1 for t≧a
t≧a and x(t)=0x(t)=0 for t<a.t<a. Then show that X(s)=L{x(t)}X(s)=L{x(t)} satisfies the equationm(s2(easX)−sb0−b1)+c(s(easX)−b0)+k(easX)=L{F(t+a)}.m(s2(easX)−sb0−b1)+c(s(easX)−b0)+k(easX)=L{F(t+a)}. This is an alternate approach to Example 7 that was suggested by Keng C. Wu of Lockheed Martin (Maritime Systems Sensors). Let x(t) denote the steady periodic solution of the given differential equation x″+4x′+20x=F(t).
x′′+4x'+20x=F(t). Suppose we write v(t) for the restriction of x(t) to the first half [0,π][0,π] of the fundamental interval [0,2π],[0,2π], and w(t) for its restriction to the second half-interval [π,2π].[π,2π]. We may regard v(t) as the solution of the initial value problemv″+4v′+20v=+20,v(0)=b0, v′(0)=b1v′′+4v'+20v=+20,v(0)=b0, v'(0)=b1 and w(t) as the solution of the initial value problem
w″+4w′+20w=−20,w(π)=c0, w′(π)=c1,w′′+4w'+20w=−20,w(π)=c0, w'(π)=c1, where the initial values b0, b1
b0, b1 and c0, c1c0, c1 are to be determined so that x(t) and x′(t)x'(t) are continuous.Transform the first of these initial value problems to show that V(s)=A(s)b0+B(s)b1+C(s),
V(s)=A(s)b0+B(s)b1+C(s), whereA(s)=s+4s2+4s+20,B(s)=1s2+4s+20,C(s)=20s(s2+4s+20).A(s)B(s)C(s)===s+4s2+4s+20,1s2+4s+20,20s(s2+4s+20). Apply the result of Problem 38 to the second initial value problem above to show that W(s)=e−πs(A(s)c0+B(s)c1−C(s)),
W(s)=e−πs(A(s)c0+B(s)c1−C(s)), where the coefficient functions A(s), B(s), C(s)A(s), B(s), C(s) are as defined in part (a).After finding the inverse transforms
a(t)=e−2t(cos 4t+12sin 4t),b(t)=14e−2tsin 4t,c(t)=1−e−2t(cos 4t+12sin 4t),a(t)b(t)c(t)===e−2t(cos 4t+12sin 4t),14e−2tsin 4t,1−e−2t(cos 4t+12sin 4t), solve the four continuity equations v(π)=c0, v′(π)=c1, w(2π)=b0, w′(2π)=b1
v(π)=c0, v'(π)=c1, w(2π)=b0, w'(2π)=b1 to find the values of the previously undetermined initial values. Conclude thatv(t)≈1−0.9981e−2t(2 cos 4t+sin 4t),w(t)≈[−1+0.9981e−2(t−π)(2 cos 4t+sin 4t)]u(t−π).v(t)w(t)≈≈1−0.9981e−2t(2 cos 4t+sin 4t),[−1+0.9981e−2(t−π)(2 cos 4t+sin 4t)]u(t−π). Finally, use these expressions to verify that the graph of the steady periodic solution x(t) looks as indicated in Fig. 10.5.11.
10.5 Application Engineering Functions
Periodic piecewise linear functions occur so frequently as input functions in engineering applications that they are sometimes called engineering functions. Computations with such functions are readily handled by computer algebra systems. In Mathematica, for instance, the SawToothWave, TriangleWave, and Square-Wave functions can be used to create the corresponding inputs with specified range, period, etc. Alternatively, we can define our own engineering functions using elementary functions available in any computer algebra system:
sawtooth[t_] := t - 2 Floor[t/2] - 1
triangularwave[t_] := 2 Abs[sawtooth[t - 1/2]] - 1
squarewave[t_] := Sign[ triangularwave[t]]Plot each of the functions to verify that it has period 2 and that its name is aptly chosen. For instance, the result of
Plot[squarewave[t], {t, 0, 6}]should look like Fig. 10.5.8. If f(t) is one of these engineering functions and p>0,
Plot[triangularwave[ 2 t/p ], {t, 0, 3 p}]with various values of p. Now let’s consider the mass–spring–dashpot equation
diffEq = m x″ [t] + c x′ [t] + k x[t] == inputwith selected parameter values and an input forcing function with period p and amplitude F0
m = 4; c = 8; k = 5; p = 1; F0 = 4;
input = F0 squarewave[2 t/p];You can plot this input function to verify that it has period 1:
Plot[input, {t, 0, 2}]Finally, let’s suppose that the mass is initially at rest in its equilibrium position and solve numerically the resulting initial value problem.
response = NDSolve[ {diffEq, x[0] == 0, x′[0] == 0},
x, {t, 0, 10}]
Plot[ x[t] /. response, {t, 0, 10}]In the resulting Fig. 10.5.17 we see that after an initial transient dies out, the response function x(t) settles down (as expected?) to a periodic oscillation with the same period as the input.
Investigate this initial value problem with several mass–spring–dashpot para–meters–for instance, selected digits of your student ID number—and with input engineering functions having various amplitudes and periods.
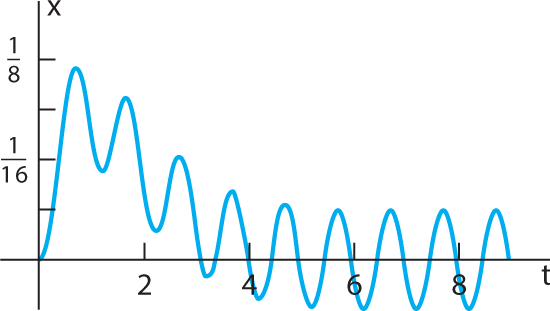
FIGURE 10.5.17.
Response x(t) to period 1 square wave input.