
7.3 The Eigenvalue Method for Linear Systems
We now introduce a powerful method for constructing the general solution of a homogeneous first-order system with constant coefficients,
By Theorem 3 of Section 7.2, we know that it suffices to find n linearly independent solution vectors x1, x2, …, xn
![]()
with arbitrary coefficients will then be a general solution of the system in (1).
To search for the n needed linearly independent solution vectors, we proceed by analogy with the characteristic root method for solving a single homogeneous equation with constant coefficients (Section 5.3). It is reasonable to anticipate solution vectors of the form
where λ, v1, v2, v3, …, vn
in (1), then each term in the resulting equations will have the factor eλt,
To investigate this possibility, it is more efficient to write the system in (1) in the matrix form
![]()
where A=[aij].
We cancel the nonzero scalar factor eλt
![]()
Recall, from Section 6.1, that Eq. (5) means that v≠0
Recall that an eigenvalue λ
and that an eigenvector v associated with λ
The Eigenvalue Method
In outline, this method for solving the n×n
First, we solve the characteristic equation in (6) for the eigenvalues λ1, λ2, …, λn
λ1, λ2, …, λn of the matrix A.Next, we attempt to find n linearly independent eigenvectors v1, v2, …, vn
v1, v2, …, vn associated with these eigenvalues.Step 2 is not always possible, but, when it is, we get n linearly independent solutions
x1(t)=v1eλit,x2(t)=v2eλ2t,…,xn(t)=vneλnt.(8)x1(t)=v1eλit,x2(t)=v2eλ2t,…,xn(t)=vneλnt. In this case the general solution of x′=Ax
x'=Ax is a linear combinationx(t)=c1x1(t)+c2x2(t)+⋯+cnxn(t)x(t)=c1x1(t)+c2x2(t)+⋯+cnxn(t) of these n solutions.
We will discuss separately the various cases that can occur, depending on whether the eigenvalues are distinct or repeated, real or complex. The case of repeated eigenvalues—multiple roots of the characteristic equation—will be deferred to Section 7.6.
Distinct Real Eigenvalues
If the eigenvalues λ1, λ2, …, λn
Example 1
Find a general solution of the system
Solution
The matrix form of the system in (9) is
The characteristic equation of the coefficient matrix is
so we have the distinct real eigenvalues λ1=−2
For the coefficient matrix A in Eq. (10), the eigenvector equation (A−λI)v=0
for the associated eigenvector v=[ab]T.
Case 1: λ1=−2.
—that is, the two scalar equations
In contrast with the typical nonsingular (algebraic) linear system that has a unique solution, the homogeneous linear system in (12) is singular—the two scalar equations obviously are equivalent (each being a multiple of the other). Therefore, Eq. (12) has infinitely many nonzero solutions—we can choose a arbitrarily (but nonzero) and then solve for b.
Substitution of an eigenvalue λ in the eigenvector equation (A−λI)v=0 always yields a singular homogeneous linear system, and among its infinity of solutions we generally seek a “simple” solution with small integer values (if possible). Looking at the second equation in (12), the choice a=1 yields b=−3, and thus
is an eigenvector associated with λ1=−2 (as is any nonzero constant multiple of v1).
Remark
If, instead of the “simplest” choice a=1, b=−3, we had made another choice a=c, b=−3c, we would have obtained the eigenvector
Because this is a constant multiple of our previous result, any choice we make leads to (a constant multiple of ) the same solution
Case 2: λ2=5. Substitution of the second eigenvalue λ=5 in (11) yields the pair
of equivalent scalar equations. With b=1 in the first equation we get a=2, so
is an eigenvector associated with λ2=5. A different choice—a=2c, b=c—would merely give a [constant] multiple of v2.
These two eigenvalues and their associated eigenvectors yield the two solutions
They are linearly independent, because their Wronskian
is nonzero. Hence a general solution of the system in (10) is
in scalar form,
Figure 7.3.1 shows some typical solution curves of the system in (10). We see two families of hyperbolas sharing the same pair of asymptotes: the line x1=2x2 obtained from the general solution with c1=0, and the line x2=−3x1 obtained with c2=0. Given initial values x1(0)=b1, x2(0)=b2, it is apparent from the figure that
If (b1,b2) lies to the right of the line x2=−3x1, then x1(t) and x2(t) both tend to +∞ as t→+∞;
If (b1,b2) lies to the left of the line x2=−3x1, then x1(t) and x2(t) both tend to −∞ as t→+∞.

FIGURE 7.3.1.
Direction field and solution curves for the linear system x′1=4x1+2x2, x′2=3x1−x2 of Example 1.
Remark
As in Example 1, it is convenient when discussing a linear system x′=Ax to use vectors x1, x2, …, xn to denote different vector-valued solutions of the system, whereas the scalars x1, x2, …, xn denote the components of a single vector-valued solution x.
Compartmental Analysis
Frequently, a complex process or system can be broken down into simpler subsystems or “compartments” that can be analyzed separately. The whole system can then be modeled by describing the interactions between the various compartments. Thus a chemical plant may consist of a succession of separate stages (or even physical compartments) in which various reactants and products combine or are mixed. It may happen that a single differential equation describes each compartment of the system; then the whole physical system is modeled by a system of differential equations.
As a simple example of a three-stage system, Fig. 7.3.2 shows three brine tanks containing V1, V2, and V3 gallons of brine, respectively. Fresh water flows into tank 1, while mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and out of tank 3. Let xi(t) denote the amount (in pounds) of salt in tank i at time t, for i=1, 2, and 3. If each flow rate is r gallons per minute, then a simple accounting of salt concentrations, as in Example 2 of Section 7.1, yields the first-order system
where
Example 2
Three brine tanks If V1=20, V2=40, V3=50, r=10 (gal/min), and the initial amounts of salt in the three brine tanks, in pounds, are
find the amount of salt in each tank at time t≧0.
Solution
Substituting the given numerical values in (14) and (15), we get the initial value problem
for the vector x(t)=[x1(t)x2(t)x3(t)]T. The simple form of the matrix
leads readily to the characteristic equation
Thus, the coefficient matrix A in (16) has the distinct eigenvalues λ1=−0.5, λ2=−0.25, and λ3=−0.2 and therefore has three linearly independent eigenvectors.

FIGURE 7.3.2.
The three brine tanks of Example 2.
Case 1: λ1=−0.5. Substituting λ=−0.5 in (17), we get the equation
for the associated eigenvector v=[abc]T. The last two rows, after division by 0.25 and 0.05, respectively, yield the scalar equations
The second equation is satisfied by b=−6 and c=5, and then the first equation gives a=3. Thus the eigenvector
is associated with the eigenvalue λ1=−0.5.
Case 2: λ2=−0.25. Substituting λ=−0.25 in (17), we get the equation
for the associated eigenvector v=[abc]T. Each of the first two rows implies that a=0, and division of the third row by 0.05 gives the equation
which is satisfied by b=1, c=−5. Thus the eigenvector
is associated with the eigenvalue λ2=−0.25.
Case 3: λ3=−0.2. Substituting λ=−0.2 in (17), we get the equation
for the eigenvector v. The first and third rows imply that a=0, and b=0, respectively, but the all-zero third column leaves c arbitrary (but nonzero). Thus
is an eigenvector associated with λ3=−0.2.
The general solution
therefore takes the form
The resulting scalar equations are
When we impose the initial conditions x1(0)=15, x2(0)=x3(0)=0, we get the equations
that are readily solved (in turn) for c1=5, c2=30, and c3=125. Thus, finally, the amounts of salt at time t in the three brine tanks are given by
Figure 7.3.3 shows the graphs of x1(t), x2(t), and x3(t). As we would expect, tank 1 is rapidly “flushed” by the incoming fresh water, and x1(t)→0 as t→+∞. The amounts x2(t) and x3(t) of salt in tanks 2 and 3 peak in turn and then approach zero as the whole three-tank system is purged of salt as t→+∞.

FIGURE 7.3.3.
The salt content functions of Example 2.
Complex Eigenvalues
Even if some of the eigenvalues are complex, so long as they are distinct the method described previously still yields n linearly independent solutions. The only complication is that the eigenvectors associated with complex eigenvalues are ordinarily complex-valued, so we will have complex-valued solutions.
To obtain real-valued solutions, we note that—because we are assuming that the matrix A has only real entries—the coefficients in the characteristic equation will all be real. Consequently any complex eigenvalues must appear in complex-conjugate pairs. Suppose, then, that λ=p+qi and ̲λ=p−qi are such a pair of eigenvalues. If v is an eigenvector associated with λ, so that
then taking complex conjugates in this equation yields
since ̲A=A and ̲I=I (these matrices being real) and the conjugate of a complex product is the product of the conjugates of the factors. Thus the conjugate ̲v of v is an eigenvector associated with ̲λ. Of course, the conjugate of a vector is defined componentwise; if
then ̲v=a−bi. The complex-valued solution associated with λ and v is then
—that is,
Because the real and imaginary parts of a complex-valued solution are also solutions, we thus get the two real-valued solutions
associated with the complex conjugate eigenvalues p±qi. It is easy to check that the same two real-valued solutions result from taking real and imaginary parts of ̲ve̲λt. Rather than memorizing the formulas in (20), it is preferable in a specific example to proceed as follows:
First, find explicitly a single complex-valued solution x(t) associated with the complex eigenvalue λ;
Then, find the real and imaginary parts x1(t) and x2(t), to get two independent real-valued solutions corresponding to the two complex conjugate eigenvalues λ and ̲λ.
Example 3
Find a general solution of the system
Solution
The coefficient matrix
has the characteristic equation
and hence has the complex conjugate eigenvalues λ=4−3i and ̲λ=4+3i.
Substituting λ=4−3i in the eigenvector equation (A−λI)v=0, we get the equation
for an associated eigenvalue v=[ab]T. Division of each row by 3 yields the two scalar equations
each of which is satisfied by a=1 and b=i. Thus, v=[1i]T is a complex eigenvector associated with the complex eigenvalue λ=4−3i.
The corresponding complex-valued solution x(t)=veλt of x′=Ax is then
The real and imaginary parts of x(t) are the real-valued solutions
A real-valued general solution of x′=Ax is then given by
Finally, a general solution of the system in (21) in scalar form is
Figure 7.3.4 shows some typical solution curves of the system in (21). Each appears to spiral counterclockwise as it emanates from the origin in the x1x2-plane. Actually, because of the factor e4t in the general solution, we see that
Along each solution curve, the point (x1(t),x2(t)) approaches the origin as t→−∞, whereas
The absolute values of x1(t) and x2(t) both increase without bound as t→+∞.

FIGURE 7.3.4.
Direction field and solution curves for the linear system x1′=4x1−3x2, x2′=3x1+4x2 of Example 3.
Figure 7.3.5 shows a “closed” system of three brine tanks with volumes V1, V2, and V3. The difference between this system and the “open” system of Fig. 7.3.2 is that now the inflow to tank 1 is the outflow from tank 3. With the same notation as in Example 2, the appropriate modification of Eq. (14) is
where ki=r/Vi as in (15).

FIGURE 7.3.5.
The three brine tanks of Example 4.
Example 4
Find the amounts x1(t), x2(t), and x3(t) of salt at time t in the three brine tanks of Fig. 7.3.5 if V1=50 gal, V2=25 gal, V3=50 gal, and r=10 gal/min.
Solution
With the given numerical values, (22) takes the form
where x=[x1x2x3]T as usual. When we expand the determinant of the matrix
along its first row, we find that the characteristic equation of A is
Thus A has the zero eigenvalue λ0=0 and the complex conjugate eigenvalues λ, ̲λ=−0.4±(0.2)i. We anticipate one solution corresponding to the zero eigenvalue and two additional linearly independent solutions corresponding to the complex conjugate eigenvalues.
Case 1: λ0=0. Substitution of λ=0 in Eq. (24) gives the eigenvector equation
for v=[abc]T. The first row gives a=c and the second row gives a=2b, so v0=[212]T is an eigenvector associated with the eigenvalue λ0=0. The corresponding solution x0(t)=v0eλ0t of Eq. (23) is the constant solution
Case 2: λ=−0.4−(0.2)i. Substitution of λ=−0.4−(0.2)i in Eq. (24) gives the eigenvector equation
The second equation (0.2)a+(0.2)ib=0 is satisfied by a=1 and b=i. Then the first equation
gives c=−1−i. Thus, v=[1i(−1−i)]T is a complex eigenvector associated with the complex eigenvalue λ=−0.4−(0.2)i.
The corresponding complex-valued solution x(t)=veλt of (23) is
The real and imaginary parts of x(t) are the real-valued solutions
The general solution
has scalar components
giving the amounts of salt in the three tanks at time t.
Observe that
Of course, the total amount of salt in the closed system is constant; the constant c0 in (29) is one-fifth the total amount of salt. Because of the factors of e(−0.4)t in (28), we see that
Thus, as t→+∞ the salt in the system approaches a steady-state distribution with 40% of the salt in each of the two 50-gallon tanks and 20% in the 25-gallon tank. So whatever the initial distribution of salt among the three tanks, the limiting distribution is one of uniform concentration throughout the system. Figure 7.3.6 shows the graphs of the three solution functions with c0=10,c1=30, and c2=−10, in which case
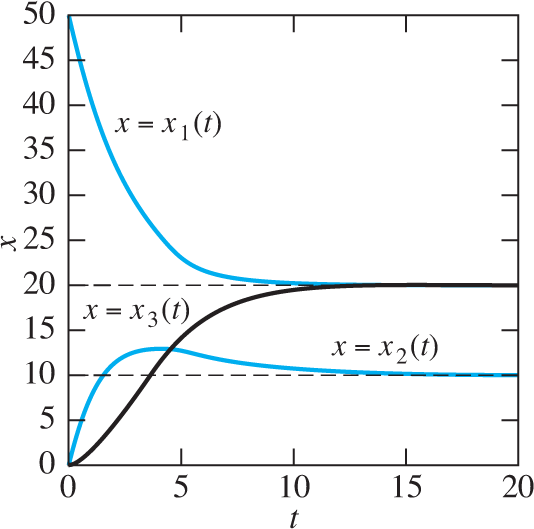
FIGURE 7.3.6.
The salt content functions of Example 4.
7.3 Problems
In Problems 1 through 16, apply the eigenvalue method of this section to find a general solution of the given system. If initial values are given, find also the corresponding particular solution. For each problem, use a computer system or graphing calculator to construct a direction field and typical solution curves for the given system.
x′1=x1+2x2,x′2=2x1+x2
x′1=2x1+3x2,x′2=2x1+x2
x′1=3x1+4x2,x′2=3x1+2x2;x1(0)=x2(0)=1
x′1=4x1+x2,x′2=6x1−x2
x′1=6x1−7x2,x′2=x1−2x2
x′1=9x1+5x2,x′2=−6x1−2x2;x1(0)=1,x2(0)=0
x′1=−3x1+4x2,x′2=6x1−5x2
x′1=x1−5x2,x′2=x1−x2
x′1=2x1−5x2,x′2=4x1−2x2;x1(0)=2,x2(0)=3
x′1=−3x1−2x2,x′2=9x1−3x2
x′1=x1−2x2,x′2=2x1+x2;x1(0)=0,x2(0)=4
x′1=x1−5x2,x′2=x1+3x2
x′1=5x1−9x2,x′2=2x1−x2
x′1=3x1−4x2,x′2=4x1+3x2
x′1=7x1−5x2,x′2=4x1+3x2
x′1=−50x1+20x2,x′2=100x1−60x2
In Problems 17 through 25, the eigenvalues of the coefficient matrix can be found by inspection and factoring. Apply the eigenvalue method to find a general solution of each system.
x′1=4x1+x2+4x3, x′2=x1+7x2+x3, x′3=4x1+x2+4x3
x′1=x1+2x2+2x3, x′2=2x1+7x2+x3, x′3=2x1+x2+7x3
x′1=4x1+x2+x3,x′2=x1+4x2+x3,x′3=x1+x2+4x3
x′1=5x1+x2+3x3, x′2=x1+7x2+x3, x′3=3x1+x2+5x3
x′1=5x1−6x3, x′2=2x1−x2−2x3, x′3=4x1−2x2−4x3
x′1=3x1+2x2+2x3, x′2=−5x1−4x2−2x3, x′3=5x1+5x2+3x3
x′1=3x1+x2+x3, x′2=−5x1−3x2−x3, x′3=5x1+5x2+3x3
x′1=2x1+x2−x3, x′2=−4x1−3x2−x3, x′3=4x1+4x2+2x3
x′1=5x1+5x2+2x3, x′2=−6x1−6x2−5x3, x′3=6x1+6x2+5x3
Find the particular solution of the system
dx1dt=3x1+x3,dx2dt=9x1−x2+2x3,dx3dt=−9x1+4x2−x3that satisfies the initial conditions x1(0)=0, x2(0)=0, x3(0)=17.
Cascading Brine Tanks
The amounts x1(t) and x2(t) of salt in the two brine tanks of Fig. 7.3.7 satisfy the differential equations
where ki=r/Vi for i=1, 2. In Problems 27 and 28 the volumes V1 and V2 are given. First solve for x1(t) and x2(t), assuming that r=10 (gal/min), x1(0)=15 (lb), and x2(0)=0. Then find the maximum amount of salt ever in tank 2. Finally, construct a figure showing the graphs of x1(t) and x2(t).

FIGURE 7.3.7.
The two brine tanks of Problems 27 and 28.
V1=50 (gal), V2=25 (gal)
V1=25 (gal), V2=40 (gal)
Interconnected Brine Tanks
The amounts x1(t) and x2(t) of salt in the two brine tanks of Fig. 7.3.8 satisfy the differential equations
where ki=r/Vi as usual. In Problems 29 and 30, solve for x1(t) and x2(t), assuming that r=10 (gal/min), x1(0)=15 (lb), and x2(0)=0. Then construct a figure showing the graphs of x1(t) and x2(t).

FIGURE 7.3.8.
The two brine tanks of Problems 29 and 30.
V1=50 (gal), V2=25 (gal)
V1=25 (gal), V2=40 (gal)
Open Three-Tank System
Problems 31 through 34 deal with the open three-tank system of Fig. 7.3.2. Fresh water flows into tank 1; mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and out of tank 3; all at the given flow rate r gallons per minute. The initial amounts x1(0)=x0 (lb), x2(0)=0, and x3(0)=0 of salt in the three tanks are given, as are their volumes V1, V2, and V3 (in gallons). First solve for the amounts of salt in the three tanks at time t, then determine the maximal amount of salt that tank 3 ever contains. Finally, construct a figure showing the graphs of x1(t), x2(t), and x3(t).
r=30, x0=27, V1=30, V2=15, V3=10
r=60, x0=45, V1=20, V2=30, V3=60
r=60, x0=45, V1=15, V2=10, V3=30
r=60, x0=40, V1=20, V2=12, V3=60
Closed Three-Tank System
Problems 35 through 37 deal with the closed three-tank system of Fig. 7.3.5, which is described by the equations in (24). Mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and from tank 3 into tank 1, all at the given flow rate r gallons per minute. The initial amounts x1(0)=x0 (pounds), x2(0)=0, and x3(0)=0 of salt in the three tanks are given, as are their volumes V1, V2, and V3 (in gallons). First solve for the amounts of salt in the three tanks at time t, then determine the limiting amount (as t→+∞) of salt in each tank. Finally, construct a figure showing the graphs of x1(t), x2(t), and x3(t).
r=120, x0=33, V1=20, V2=6, V3=40
r=10, x0=18, V1=20, V2=50, V3=20
r=60, x0=55, V1=60, V2=20, V3=30
For each matrix A given in Problems 38 through 40, the zeros in the matrix make its characteristic polynomial easy to calculate. Find the general solution of x′=Ax.
A=[1000220003300044]
A=[−2009420−1000−180001]
A=[2000−21−5−27−9005000−21−2]
The coefficient matrix A of the 4×4 system
x′1=4x1+x2+x3+7x4,x′2=x1+4x2+10x3+x4,x′3=x1+10x2+4x3+x4,x′4=7x1+x2+x3+4x4has eigenvalues λ1=−3, λ2=−6, λ3=10, and λ4=15. Find the particular solution of this system that satisfies the initial conditions
x1(0)=3,x2(0)=x3(0)=1,x4(0)=3.
In Problems 42 through 50, use a calculator or computer system to calculate the eigenvalues and eigenvectors (as illustrated in Application 7.3) in order to find a general solution of the linear system x′=Ax with the given coefficient matrix A.
A=[−40−12543513−46−25−734]
A=[−20111312−1−7−482131]
A=[14723−202−90−91299015−123]
A=[9−7−50−12711924−17−19−9−1813179]
A=[13−421061392−16527016−20−31−1−62233]
A=[23−18−160−867934−27−26−9−26212512]
A=[47−85−5−103218−2139−40−167−121−23264360248]
A=[139−14−52−1428−22578−7370−38−139−3876152−16−59−133595−10−38−723]
A=[913000−13−1419−10−20104−3012−7−301218−1210−10−910269065−15−1423−10−20100]
7.3 Application Automatic Calculation of Eigenvalues and Eigenvectors
Most computational systems offer the capability to find eigenvalues and eigenvectors readily. For instance, Fig. 7.3.9 shows a graphing calculator computation of the eigenvalues and eigenvectors of the matrix

FIGURE 7.3.9.
TI-Nspire CX CAS calculation of the eigenvalues and eigenvectors of the matrix A.
of Example 2. We see the three eigenvectors displayed as column vectors, appearing in the same order as their corresponding eigenvalues. In this display the eigenvectors are normalized, that is, multiplied by an appropriate scalar so as to have length 1. You can verify, for example, that the displayed eigenvector corresponding to the third eigenvalue λ=−12 is a scalar multiple of v=[1−253]T.. The Maple commands
with(linalg)
A := matrix(3,3,[−0.5,0,0,0.5,−0.25,0,0,0.25,−0.2]);
eigenvects(A);
the Mathematica commands
A = {{−0.5,0,0},{0.5,−0.25,0},{0,0.25,−0.2}}
Eigensystem[A]
the Wolfram|Alpha query
((−0.5, 0, 0), (0.5, −0.25, 0), (0, 0.25, −0.2))
and the Matlab commands
A = [−0.5,0,0; 0.5,−0.25,0; 0,0.25,−0.2]
[V,D] = eig(A)
(where D will be a diagonal matrix displaying the eigenvalues of A and the column vectors of V are the corresponding eigenvectors) produce similar results. You can use these commands to find the eigenvalues and eigenvectors needed for any of the problems in this section.
For a more substantial investigation, choose a positive integer n<10 (n=5, for instance) and let q1, q2, …, qn denote the first n nonzero digits in your student ID number. Now consider an open system of brine tanks as in Fig. 7.3.2, except with n rather than three successive tanks having volumes Vi=10qi (i=1, 2, …, n) in gallons. If each flow rate is r=10 gallons per minute, then the salt amounts x1(t), x2(t), …, xn(t) satisfy the linear system
where ki=r/Vi. Apply the eigenvalue method to solve this system with initial conditions
Graph the solution functions and estimate graphically the maximum amount of salt that each tank ever contains.
For an alternative investigation, suppose that the system of n tanks is closed as in Fig. 7.3.5, so that tank 1 receives as inflow the outflow from tank n (rather than fresh water). Then the first equation should be replaced with x′1=knxn−k1x1. Now show that, in this closed system, as t→+∞ the salt originally in tank 1 distributes itself with constant density throughout the various tanks. A plot like Fig. 7.3.6 should make this fairly obvious.