
In this chapter, you'll be learning how to apply the convolutional neural network (also referred to as the CNN or convnet), perhaps the best-known deep architecture, via the following steps:
- Taking a look at the convnet's topology and learning processes, including convolutional and pooling layers
- Understanding how we can combine convnet components into successful network architectures
- Using Python code to apply a convnet architecture so as to solve a well-known image classification task
In the field of machine learning, there is an enduring preference for developing structures in code that parallel biological structures. One of the most obvious examples is that of the MLP neural network, whose topology and learning processes are inspired by the neurons of the human brain.
This preference has turned out to be highly efficient; the availability of specialized, optimized biological structures that excel at specific sets of tasks gives us a wealth of templates and clues from which to design and create effective learning models.
The design of convolutional neural networks takes inspiration from the visual cortex—the area of the brain that processes visual input. The visual cortex has several specializations that enable it to effectively process visual data; it contains many receptor cells that detect light in overlapping regions of the visual field. All receptor cells are subject to the same convolution operation, which is to say that they all process their input in the same way. These specializations were incorporated into the design of convnets, making their topology noticeably distinct from that of other neural networks.
It's safe to say that CNN (convnets for short) are underpinning many of the most impactful current advances in artificial intelligence and machine learning. Variants of CNN are applied to some of the most sophisticated visual, linguistic, and problem-solving applications in existence. Some examples include the following:
- Google has developed a range of specialized convnet architectures, including GoogLeNet, a 22-layer convnet architecture. In addition, Google's DeepDream program, which became well-known for its overtrained, hallucinogenic imagery, also uses a convolutional neural network.
- Convolutional nets have been taught to play the game Go (a long-standing AI challenge), achieving win-rates ranging between 85% and 91% against highly-ranked players.
- Facebook uses convolutional nets in face verification (DeepFace).
- Baidu, Microsoft research, IBM, and Twitter are among the many other teams using convnets to tackle the challenges around trying to deliver next-generation intelligent applications.
In recent years, object recognition challenges, such as the 2014 ImageNet challenge, have been dominated by winners employing specialized convnet implementations or multiple-model ensembles that combine convnets with other architectures.
While we'll cover how to create and effectively apply ensembles in Chapter 8, Ensemble Methods, this chapter focuses on the successful application of convolutional neural networks to large-scale visual classification contexts.
The convolutional neural network's architecture should be fairly familiar; the network is an acyclic graph composed of layers of increasingly few nodes, where each layer feeds into the next. This will be very familiar from many well-known network topologies such as the MLP.
Perhaps the most immediate difference between a convolutional neural network and most other networks is that all of the neurons in a convnet are identical! All neurons possess the same parameters and weight values. As you can see, this will immediately reduce the number of parameter values controlled by the network, bringing substantial efficiency savings. It also typically improves network learning rate as there are fewer free parameters to be managed and computed over. As we'll see later in this chapter, shared weights also enable a convnet to learn features irrespective of their position in the input (for example, the input image or audio signal).
Another big difference between convolutional networks and other architectures is that the connectivity between nodes is limited such as to develop a spatially local connectivity pattern. In other words, the inputs to a given node will be limited to only those nodes whose receptor fields are contiguous. This may be spatially contiguous, as in the case of image data; in such cases, each neuron's inputs will ultimately draw from a continuous subset of the image. In the case of audio signal data, the input might instead be a continuous window of time.
To illustrate this more clearly, let's take an example input image and discuss how a convolutional network might process parts of that image across specific nodes. Nodes in the first layer of a convolutional neural network will be assigned subsets of the input image. In this case, let's say that they take a 3 x 3 pixel subset of the image each. Our coverage covers the entire image without any overlap between the areas taken as input by nodes and without any gaps. (Note that none of these conditions are automatically true for convnet implementations.) Each node is assigned a 3 x 3 pixel subset of the image (the receptive field of the node) and outputs a transformed version of that input. We'll disregard the specifics of that transformation for now.
This output is usually then picked up by a second layer of nodes. In this case, let's say that our second layer is taking a subset of all of the outputs from nodes in the first layer. For example, it might be taking a contiguous 6 x 6 pixel subset of the original image; that is, it has a receptive field that covers the outputs of exactly four nodes from the preceding layer. This becomes a little more intuitive when explained visually:

Each layer is composable; the output of one convolutional layer may be fed into the next layer as an input. This provides the same effect that we saw in the Chapter 3, Stacked Denoising Autoencoders; successive layers develop representations of increasingly high-level, abstract features. Furthermore, as we build downward—adding layers—the representation becomes responsive to a larger region of pixel space. Ultimately, by stacking layers, we can work our way toward global representations of the entire input.
As described, in order to prevent each node from learning an unpredictable (and difficult to tune!) set of very local, free parameters, weights in a layer are shared across the entire layer. To be completely precise, the filters applied in a convolutional layer are a single set of filters, which are slid (convolved) across the input dataset. This produces a two-dimensional activation map of the input, which is referred to as the feature map.
The filter itself is subject to four hyperparameters: size, depth, stride, and zero-padding. The size of the filter is fairly self-explanatory, being the area of the filter (obviously, found by multiplying height and width; a filter need not be square!). Larger filters will tend to overlap more, and as we'll see, this can improve the accuracy of classification. Crucially, however, increasing the filter size will create increasingly large outputs. As we'll see, managing the size of outputs from convolutional layers is a huge factor in controlling the efficiency of a network.
Depth defines the number of nodes in the layer that connect to the same region of the input. The trick to understanding depth is to recognize that looking at an image (for people or networks) involves processing multiple different types of property. Anyone who has ever looked at all the image adjustment sliders in Photoshop has an idea of what this might entail. Depth is sometimes referred to as a dimension in its own right; it almost relates to the complexity of an image, not in terms of its contents but in terms of the number of channels needed to accurately describe it.
It's possible that the depth might describe color channels, with nodes mapped to recognize green, blue, or red in the input. This, incidentally, leads to a common convention where depth is set to three (particularly at the first convolution layer). It's very important to recognize that some nodes commonly learn to express less easily-described properties of input images that happen to enable a convnet to learn that image more accurately. Increasing the depth hyperparameter tends to enable nodes to encode more information about inputs, with the attendant problems and benefits that you might expect.
As a result, setting the depth parameter to too small a value tends to lead to poor results because the network doesn't have the expressive depth (in terms of channel count) required to accurately characterize input data. This is a problem analogous to not having enough features, except that it's more easily fixed; one can tune the depth of the network upward to improve the expressive depth of the convnet.
Equally, setting the depth parameter to too small a value can be redundant or harmful to performance, thereafter. If in doubt, consider testing the appropriate depth value during network configuration via hyperparameter optimization, the elbow method, or another technique.
Stride is a measure of spacing between neurons. A stride value of one will lead every element of the input (for an image, potentially every pixel) to be the center of a filter instance. This naturally leads to a high degree of overlap and very large outputs. Increasing the stride causes less of an overlap in the receptive fields and the output's size is reduced. While tuning the stride of a convnet is a question of weighing accuracy against output size, it can generally be a good idea to use smaller strides, which tend to work better. In addition, a stride value of one enables us to manage down-sampling and scale reduction at pooling layers (as we'll discuss later in the chapter).
The following diagram graphically displays both Depth and Stride:

The final hyperparameter, zero-padding, offers an interesting convenience. Zero-padding is the process of setting the outer values (the border) of each receptive field to zero, which has the effect of reducing the output size for that layer. It's possible to set one, or multiple, pixels around the border of the field to zero, which reduces the output size accordingly. There are, of course, limits; obviously, it's not a good idea to set zero-padding and stride such that areas of the input are not touched by a filter! More generally, increasing the degree of zero-padding can cause a decrease in effectiveness, which is tied to the increased difficulty of learning features via coarse coding. (Refer to the Understanding pooling layers section in this chapter.)
However, zero-padding is very helpful because it enables us to adjust the input and output sizes to be the same. This is a very common practice; using zero-padding to ensure that the size of the input layer and output layer are equal, we are able to easily manage the stride and depth values. Without using zero-padding in this way, we would need to do a lot of work tracking input sizes and managing network parameters simply to make the network function correctly. In addition, zero-padding also improves performance as, without it, a convnet will tend to gradually degrade content at the edges of the filter.
In order to calibrate the number of nodes, appropriate stride, and padding for successive layers when we define our convnet, we need to know the size of the output from the preceding layer. We can calculate the spatial size of a layer's output (O) as a function of the input image size (W), filter size (F), stride (S), and the amount of zero-padding applied (P), as follows:

If O is not an integer, the filters do not tile across the input neatly and instead extend over the edge of the input. This can cause some problematic issues when training (normally involving thrown exceptions)! By adjusting the stride value, one can find a whole-number solution for O and train effectively. It is normal for the stride to be constrained to what is possible given the other hyperparameter values and size of the input.
We've discussed the hyperparameters involved in correctly configuring the convolutional layer, but we haven't yet discussed the convolution process itself. Convolution is a mathematical operator, like addition or derivation, which is heavily used in signal processing applications and in many other contexts where its application helps simplify complex equations.
Loosely speaking, convolution is an operation over two functions, such as to produce a third function that is a modified version of one of the two original functions. In the case of convolution within a convnet, the first component is the network's input. In the case of convolution applied to images, convolution is applied in two dimensions (the width and height of the image). The input image is typically three matrices of pixels—one for each of the red, blue, and green color channels, with values ranging between 0 and 255 in each channel.
Note
At this point, it's worth introducing the concept of a tensor. Tensor is a term commonly used to refer to an n-dimensional array or matrix of input data, commonly applied in deep learning contexts. It's effectively analogous to a matrix or array. We'll be discussing tensors in more detail, both in this chapter and in Chapter 9, Additional Python Machine Learning Tools (where we review the TensorFlow library). It's worth noting that the term tensor is noticing a resurgence of use in the machine learning community, largely through the influence of Google machine intelligence research teams.
The second input to the convolution operation is the convolution kernel, a single matrix of floating point numbers that acts as a filter on the input matrices. The output of this convolution operation is the feature map. The convolution operation works by sliding the filter across the input, computing the dot product of the two arguments at each instance, which is written to the feature map. In cases where the stride of the convolutional layer is one, this operation will be performed across each pixel of the input image.
The main advantage of convolution is that it reduces the need for feature engineering. Creating and managing complex kernels and performing the highly specialized feature engineering processes needed is a demanding task, made more challenging by the fact that feature engineering processes that work well in one context can work poorly in most others. While we discuss feature engineering in detail in Chapter 7, Feature Engineering Part II, convolutional nets offer a powerful alternative.
CNN, however, incrementally improve their kernel's ability to filter a given input, thus automatically optimizing their kernel. This process is accelerated by learning multiple kernels in parallel at once. This is feature learning, which we've encountered in previous chapters. Feature learning can offer tremendous advantages in time and in increasing the accessibility of many problems. As with our earlier SDA and DBN implementations, we would look to pass our learned features to a much simpler, shallow neural network, which uses these features to classify the input image.
Stacking convolutional layers allows us to create a topology that effectively creates features as feature maps for complex, noisy input data. However, convolutional layers are not the only component of a deep network. It is common to weave convolutional layers in with pooling layers. Pooling is an operation over feature maps, where multiple feature values are aggregated into a single value—mostly using a max (max-pooling), mean (mean-pooling), or summation (sum-pooling) operation.
Pooling is a fairly natural approach that offers substantial advantages. If we do not aggregate feature maps, we tend to find ourselves with a huge amount of features. The CIFAR-10 dataset that we'll be classifying later in this chapter contains 60,000 32 x 32 pixel images. If we hypothetically learned 200 features for each image—over 8 x 8 inputs—then at each convolution, we'd find ourselves with an output vector of size (32 – 8+1) * (32 – 8+1) * 200, or 125,000 features per image. Convolution produces a huge amount of features that tend to make computation very expensive and can also introduce significant overfitting problems.
The other major advantage provided by a pooling operation is that it provides a level of robustness against the many, small deviations and variances that occur in modeling noisy, high-dimensional data. Specifically, pooling prevents the network learning the position of features too specifically (overfitting), which is obviously a critical requirement in image processing and recognition settings. With pooling, the network no longer fixates on the precise location of features in the input and gains a greater ability to generalize. This is called translation-invariance.
Max-pooling is the most commonly applied pooling operation. This is because it focuses on the most responsive features in question that should, in theory, make it the best candidate for image recognition and classification purposes. By a similar logic, min-pooling tends to be applied in cases where it is necessary to take additional steps to prevent an overly sensitive classification or overfitting from occurring.
For obvious reasons, it's prudent to begin modeling using a quickly applied and straightforward pooling method such as max-pooling. However, when seeking additional gains in network performance during later iterations, it's important to look at whether your pooling operations can be improved on. There isn't any real restriction in terms of defining your own pooling operation. Indeed, finding a more effective subsampling method or alternative aggregation can substantially improve the performance of your model.
In terms of theano code, a max-pooling implementation is pretty straightforward and may look like this:
from theano.tensor.signal import downsample
input = T.dtensor4('input')
maxpool_shape = (2, 2)
pool_out = downsample.max_pool_2d(input, maxpool_shape, ignore_border=True)
f = theano.function([input],pool_out)The max_pool_2d function takes an n-dimensional tensor and downscaling factor, in this case, input and maxpool_shape, with the latter being a tuple of length 2, containing width and height downscaling factors for the input image. The max_pool_2d operation then performs max-pooling over the two trailing dimensions of the vector:
invals = numpy.random.RandomState(1).rand(3, 2, 5, 5) pool_out = downsample.max_pool_2d(input, maxpool_shape, ignore_border=False) f = theano.function([input],pool_out)
The ignore_border determines whether the border values are considered or discarded. This max-pooling operation produces the following, given that ignore_border = True:
[[ 0.72032449 0.39676747] [ 0.6852195 0.87811744]]
As you can see, pooling is a straightforward operation that can provide dramatic results (in this case, the input was a 5 x 5 matrix, reduced to 2 x 2). However, pooling is not without critics. In particular, Geoffrey Hinton offered this pretty delightful soundbite:
"The pooling operation used in convolutional neural networks is a big mistake and the fact that it works so well is a disaster.
If the pools do not overlap, pooling loses valuable information about where things are. We need this information to detect precise relationships between the parts of an object. Its true that if the pools overlap enough, the positions of features will be accurately preserved by "coarse coding" (see my paper on "distributed representations" in 1986 for an explanation of this effect). But I no longer believe that coarse coding is the best way to represent the poses of objects relative to the viewer (by pose I mean position, orientation, and scale)."
This is a bold statement, but it makes sense. Hinton's telling us that the pooling operation, as an aggregation, does what any aggregation necessarily does—it reduces the data to a simpler and less informationally-rich format. This wouldn't be too damaging, except that Hinton goes further.
Even if we'd reduced the data down to single values for each pool, we could still hope that the fact that multiple pools overlap spatially would still present feature encodings. (This is the coarse coding referred to by Hinton.) This is also quite an intuitive concept. Imagine that you're listening in to a signal on a noisy radio frequency. Even if you only caught one word in three, it's probable that you'd be able to distinguish a distress signal from the shipping forecast!
However, Hinton follows up by observing that coarse coding is not as effective in learning pose (position, orientation, and scale). There are so many permutations in viewpoint relative to an object that it's unlikely two images would be alike and the sheer variety of possible poses becomes a challenge for a convolutional network using pooling. This suggests that an architecture that does not overcome this challenge may not be able to break past an upper limit for image classification.
However, the general consensus, at least for now, is that even after acknowledging all of this, it is still highly advantageous in terms of efficiency and translation-invariance to continue using pooling operations in convnets. Right now, the argument goes that it's the best we have!
Meanwhile, Hinton proposed an alternative to convnets in the form of the transforming autoencoder. The transforming autoencoder offers accuracy improvements on learning tasks that require a high level of precision (such as facial recognition), where pooling operations would cause a reduction in precision. The Further reading section of this chapter contains recommendations if you are interested in learning more about the transforming autoencoder.
So, we've spent quite a bit of time digging into the convolutional neural network—its components, how they work, and their hyperparameters. Before we move on to put the theory into action, it's worth discussing how all of these theoretical components fit together into a working architecture. To do this, let's discuss what training a convnet looks like.
The means of training a convolutional network will be familiar to readers of the preceding chapters. The convolutional architecture itself is used to pretrain a simpler network structure (for example, an MLP). The backpropagation algorithm is the standard method to compute the gradient when pretraining. During this process, every layer undertakes three tasks:
- Forward pass: Each feature map is computed as a sum of all feature maps convolved with the corresponding weight kernel
- Backward pass: The gradients respective to inputs are calculated by convolving the transposed weight kernel with the gradients, with respect to the outputs
- The loss for each kernel is calculated, enabling the individual weight adjustment of every kernel as needed
Repetition of this process allows us to achieve increasing kernel performance until we reach a point of convergence. At this point, we will hope to have developed a set of features sufficient that the capping network is able to effectively classify over these features.
This process can execute slowly, even on a fairly advanced GPU. Some recent developments have helped accelerate the training process, including the use of the Fast Fourier Transform to accelerate the convolution process (for cases where the convolution kernel is of roughly equal size to the input image).
So far, we've discussed some of the elements required to create a CNN. The next subject of discussion should be how we go about combining these components to create capable convolutional nets as well as which combinations of components can work well. We'll draw guidance from a number of forerunning convnet implementations as we build an understanding of what is commonly done as well as what is possible.
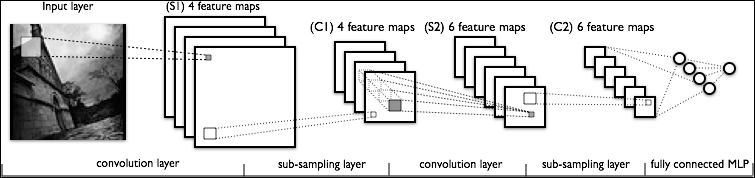
Probably the best-known convolutional network implementation is Yann LeCun's LeNet. LeNet has gone through several iterations since LeNet-1 in late 1980, but has been increasingly effective at performing tasks including handwritten digit and image classification. LeNet is structured using alternating convolution and pooling layers capped by an MLP, as follows:
Each layer is partially-connected, as we discussed earlier, with the MLP being a fully connected layer. At each layer, multiple feature maps (channels) are employed; this gives us the advantage of being able to create more complex sets of filters. As we'll see, using multiple channels within a layer is a powerful technique employed in advanced use cases.
It's common to use max-pooling layers to reduce the dimensionality of the output to match the input as well as generally manage output volumes. How pooling is implemented, particularly in regard to the relative position of convolutional and pooling layers, is an element that tends to vary between implementations. It's generally common to develop a layer as a set of operations that feed into, and are fed into, a single Fully Connected layer, as shown in the following example:

While this network structure wouldn't work in practice, it's a helpful illustration of the fact that a network can be constructed from the components you've learned about in a number of ways. How this network is structured and how complex it becomes should be motivated by the challenge the network is intended to solve. Different problems can call for very different solutions.
In the case of the LeNet implementation that we'll be working with later in this chapter, each layer contains multiple convolutional layers in parallel with a max-pooling layer following each. Diagrammatically, a LeNet layer looks like the following image:

This architecture will enable us to start looking at some initial use cases quickly and easily, but in general won't perform well for some of the state-of-the-art applications we'll run into later in this book. Given this fact, there are some more extensive deep learning architectures designed to tackle the most challenging problems, whose topologies are worth discussing. One of the best-known convnet architectures is Google's Inception network, now more commonly known as GoogLeNet.
GoogLeNet was designed to tackle computer vision challenges involving Internet-quality image data, that is, images that have been captured in real contexts where the pose, lighting, occlusion, and clutter of images vary significantly. GoogLeNet was applied to the 2014 ImageNet challenge with noteworthy success, achieving only 6.7% error rate on the test dataset. ImageNet images are small, high-granularity images taken from many, varied classes. Multiple classes may appear very similar (such as varieties of tree) and the network architecture must be able to find increasingly challenging class distinctions to succeed. For a concrete example, consider the following ImageNet image:

Given the demands of this problem, the GoogLeNet architecture used to win ImageNet 14 departs from the LeNet model in several key ways. GoogLeNet's basic layer design is known as the Inception module and is made up of the following components:

The 1 x 1 convolutional layers used here are followed by Rectified Linear Units (ReLU). This approach is heavily used in speech and audio modeling contexts as ReLU can be used to effectively train deep models without pretraining and without facing some of the gradient vanishing problems that challenge other activation types. More information on ReLU is provided in the Further reading section of this chapter. The DepthConcat element provides a concatenation function, which consolidates the outputs of multiple units and substantially improves training time.
GoogLeNet chains layers of this type to create a full network. Indeed, the repetition of inception modules through GoogLeNet (nine times!) suggests that Network In Network (NIN) (deep architectures created from chained network modules) approaches are going to continue to be a serious contender in deep learning circles. The paper describing GoogLeNet and demonstrating how inception models were integrated into the network is provided in the Further reading section of this chapter.
Beyond the regularity of Inception module stacking, GoogLeNet has a few further surprises to throw at us. The first few layers are typically more straightforward with single-channel convolutional and max-pooling layers used at first. Additionally, at several points, GoogLeNet introduced a branch off the main structure using an average-pool layer, feeding into auxiliary softmax classifiers. The purpose of these classifiers was to improve the gradient signal that gets propagated back in lower layers of the network, enabling stronger performance at the early and middle network layers. Instead of one huge and potentially vague backpropagation process stemming from the final layer of the network, GoogLeNet instead has several intermediary update sources.
What's really important to take from this implementation is that GoogLeNet and other top convnet architectures are mainly successful because they are able to find effective configurations using the highly available components that we've discussed in this chapter. Now that we've had a chance to discuss the architecture and components of a convolutional net and the opportunity to discuss how these components are used to construct some highly advanced networks, it's time to apply the techniques to solve a problem of our own!
We'll be working with image data to try out our convnet. The image data that we worked with in earlier chapters, including the MNIST digit dataset, was a useful training dataset (with many valuable real-world applications such as automated check reading!). However, it differs from almost all photographic or video data in an important way; most visual data is highly noisy.
Problem variables can include pose, lighting, occlusion, and clutter, which may be expressed independently or in conjunction in huge variety. This means that the task of creating a function that is invariant to all properties of noise in the dataset is challenging; the function is typically very complex and nonlinear. In Chapter 7, Feature Engineering Part II, we'll discuss how techniques such as whitening can help mitigate some of these challenges, but as we'll see, even such techniques by themselves are insufficient to yield good classification (at least, without a very large investment of time!). By far, the most efficient solution to the problem of noise in image data, as we've already seen in multiple contexts, is to use a deep architecture rather than a broad one (that is, a neural network with few, high-dimensional layers, which is vulnerable to problematic overfitting and generalizability problems).
From discussions in previous chapters, the reasons for a deep architecture may already be clear; successive layers of a deep architecture reuse the reasoning and computation performed in preceding layers. Deep architectures can thus build a representation that is sequentially improved by successive layers of the network without performing extensive recalculation on any individual layer. This makes the challenging task of classifying large datasets of noisy photograph data achievable to a high level of accuracy in a relatively short time, without extensive feature engineering.
Now that we've discussed the challenges of modeling image data and advantages of a deep architecture in such contexts, let's apply a convnet to a real-world classification problem.
As in preceding chapters, we're going to start out with a toy example, which we'll use to familiarize ourselves with the architecture of our deep network. This time, we're going to take on a classic image processing challenge, CIFAR-10. CIFAR-10 is a dataset of 60,000 32 x 32 color images in 10 classes, with each class containing 6,000 images. The data is already split into five training batches, with one test batch. The classes and some images from each dataset are as follows:

While the industry has—to an extent—moved on to tackle other datasets such as ImageNet, CIFAR-10 was long regarded as the bar to reach in terms of image classification, with a great many data scientists attempting to create architectures that classify the dataset to human levels of accuracy, where human error rate is estimated at around 6%.
In November 2014, Kaggle ran a contest whose objective was to classify CIFAR-10 as accurately as possible. This contest's highest-scoring entry produced 95.55% classification accuracy, with the result using convolutional networks and a Network-in-Network approach. We'll discuss the challenge of classifying this dataset, as well as some of the more advanced techniques we can bring to bear, in Chapter 8, Ensemble Methods; for now, let's begin by having a go at classification with a convolutional network.
For our first attempt, we'll apply a fairly simple convolutional network with the following objectives:
- Applying a filter to the image and view the output
- Seeing the weights that our convnet created
- Understanding the difference between the outputs of effective and ineffective networks
In this chapter, we're going to take an approach that we haven't taken before, which will be of huge importance to you when you come to use these techniques in the wild. We saw earlier in this chapter how the deep architectures developed to solve different problems may differ structurally in many ways.
It's important to be able to create problem-specific network architectures so that we can adapt our implementation to fit a range of real-world problems. To do this, we'll be constructing our network using components that are modular and can be recombined in almost any way necessary, without too much additional effort. We saw the impact of modularity earlier in this chapter, and it's worth exploring how to apply this effect to our own networks.
As we discussed earlier in the chapter, convnets become particularly powerful when tasked to classify very large and varied datasets of up to tens or hundreds of thousands of images. As such, let's be a little ambitious and see whether we can apply a convnet to classify CIFAR-10.
In setting up our convolutional network, we'll begin by defining a useable class and initializing the relevant network parameters, particularly weights and biases. This approach will be familiar to readers of the preceding chapters.
class LeNetConvPoolLayer(object):
def __init__(self, rng, input, filter_shape, image_shape,
poolsize=(2, 2)):
assert image_shape[1] == filter_shape[1]
self.input = input
fan_in = numpy.prod(filter_shape[1:])
fan_out = (filter_shape[0] * numpy.prod(filter_shape[2:])
numpy.prod(poolsize))
W_bound = numpy.sqrt(6. / (fan_in + fan_out))
self.W = theano.shared(
numpy.asarray(
rng.uniform(low=-W_bound, high=W_bound,
size=filter_shape),
dtype=theano.config.floatX
),
borrow=True
)Before moving on to create the biases, it's worth reviewing what we have thus far. The LeNetConvPoolLayer class is intended to implement one full convolutional and pooling layer as per the LeNet layer structure. This class contains several useful initial parameters.
From previous chapters, we're familiar with the rng parameter used to initialize weights to random values. We can also recognize the input parameter. As in most cases, image input tends to take the form of a symbolic image tensor. This image input is shaped by the image_shape parameter; this is a tuple or list of length 4 describing the dimensions of the input. As we move through successive layers, image_shape will reduce increasingly. As a tuple, the dimensions of image_shape simply specify the height and width of the input. As a list of length 4, the parameters, in order, are as follows:
- The batch size
- The number of input feature maps
- The height of the input image
- The width of the input image
While image_shape specifies the size of the input, filter_shape specifies the dimensions of the filter. As a list of length 4, the parameters, in order, are as follows:
- The number of filters (channels) to be applied
- The number of input feature maps
- The height of the filter
- The width of the filter
However, the height and width may be entered without any additional parameters. The final parameter here, poolsize, describes the downsizing factor. This is expressed as a list of length 2, the first element being the number of rows and the second—the number of columns.
Having defined these values, we immediately apply them to define the LeNetConvPoolLayer class better. In defining fan_in, we set the inputs to each hidden unit to be a multiple of the number of input feature maps—the filter height and width. Simply enough, we also define fan_out, a gradient that's calculated as a multiple of the number of output feature maps—the feature height and width—divided by the pooling size.
Next, we move on to defining the bias as a set of one-dimensional tensors, one for each output feature map:
b_values = numpy.zeros((filter_shape[0],),
dtype=theano.config.floatX)
self.b = theano.shared(value=b_values, borrow=True)
conv_out = conv.conv2d(
input=input,
filters=self.W,
filter_shape=filter_shape,
image_shape=image_shape
)With this single function call, we've defined a convolution operation that uses the filters we previously defined. At times, it can be a little staggering to see how much theory needs to be known to effectively apply a single function! The next step is to create a similar pooling operation using max_pool_2d:
pooled_out = downsample.max_pool_2d(
input=conv_out,
ds=poolsize,
ignore_border=True
)
self.output = T.tanh(pooled_out + self.b.dimshuffle('x',
0, 'x', 'x'))
self.params = [self.W, self.b]
self.input = inputFinally, we add the bias term, first reshaping it to be a tensor of shape (1, n_filters, 1, 1). This has the simple effect of causing the bias to affect every feature map and minibatch. At this point, we have all of the components we need to build a basic convnet. Let's move on to create our own network:
x = T.matrix('x')
y = T.ivector('y') This process is fairly simple. We build the layers in order, passing parameters to the class that we previously specified. Let's start by building our first layer:
layer0_input = x.reshape((batch_size, 1, 32, 32))
layer0 = LeNetConvPoolLayer(
rng,
input=layer0_input,
image_shape=(batch_size, 1, 32, 32),
filter_shape=(nkerns[0], 1, 5, 5),
poolsize=(2, 2)
)We begin by reshaping the input to spread it across all of the intended minibatches. As the CIFAR-10 images are of a 32 x 32 dimension, we've used this input size for the height and width dimensions. The filtering process reduces the size of this input to 32- 5+1 in each dimension, or 28. Pooling reduces this by half in each dimension to create an output layer of shape (batch_size, nkerns[0], 14, 14).
This is a completed first layer. Next, we can attach a second layer to this using the same code:
layer1 = LeNetConvPoolLayer(
rng,
input=layer0.output,
image_shape=(batch_size, nkerns[0], 14, 14),
filter_shape=(nkerns[1], nkerns[0], 5, 5),
poolsize=(2, 2)
)As per the previous layer, the output shape for this layer is (batch_size, nkerns[1], 5, 5). So far, so good! Let's feed this output to the next, fully-connected sigmoid layer. To begin with, we need to flatten the input shape to two dimensions. With the values that we've fed to the network so far, the input will be a matrix of shape (500, 1250). As such, we'll set up an appropriate layer2:
layer2_input = layer1.output.flatten(2)
layer2 = HiddenLayer(
rng,
input=layer2_input,
n_in=nkerns[1] * 5 * 5
n_out=500,
activation=T.tanh
)This leaves us in a good place to finish this network's architecture, by adding a final, logistic regression layer that calculates the values of the fully-connected sigmoid layer.
Let's try out this code:
x = T.matrix(CIFAR-10_train)
y = T.ivector(CIFAR-10_test)
Chapter_4/convolutional_mlp.pyThe results that we obtained were as follows:
Optimization complete. Best validation score of 0.885725 % obtained at iteration 17400, with test performance 0.902508 % The code for file convolutional_mlp.py ran for 26.50m
This accuracy score, at validation, is reasonably good. It's not at a human level of accuracy, which, as we established, is roughly 94%. Equally, it is not the best score that we could achieve with a convnet.
For instance, the Further Reading section of this chapter refers to a convnet implemented in Torch using a combination of dropout (which we studied in Chapter 3, Stacked Denoising Autoencoders) and Batch Normalization (a normalization technique intended to reduce covariate drift during the training process; refer to the Further Reading section for further technical notes and papers on this technique), which scored 92.45% validation accuracy.
A score of 88.57% is, however, in the same ballpark and can give us confidence that we're within striking distance of an effective network architecture for the CIFAR-10 problem. More importantly, you've learned a lot about how to configure and train a convolutional neural network effectively.