
i
i
i
i
i
i
i
i
21.1. Colorimetry 541
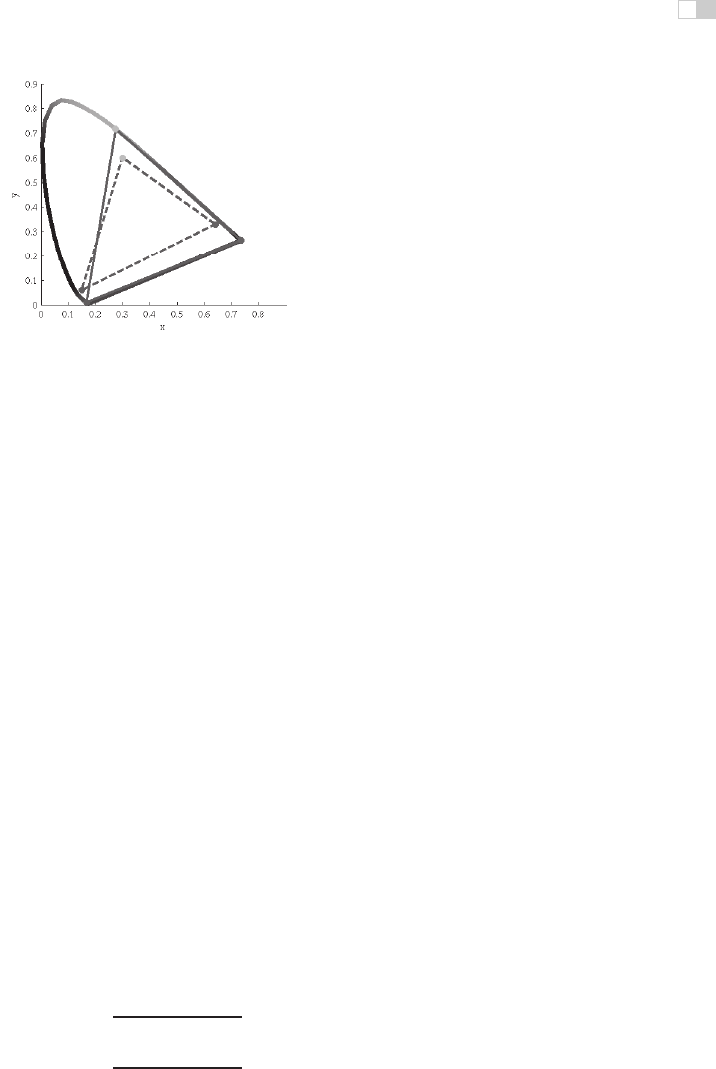
Figure 21.7. The chromaticity boundaries of the CIE RGB primaries at 435.8, 546.1, and
700 nm (solid) and a typical HDTV (dashed). (See also Plate XXIX.)
between either end of the horseshoe does not represent a monochromatic color,
but rather a combination of short and long wavelength stimuli.
A (non-monochromatic) primary can be integrated over all visible wave-
lengths, leading to (X, Y, Z) tristimulus values, and subsequently to an (x, y)
chromaticity coordinate, i.e., a point on a chromaticity diagram. Repeating this
for two or more primaries yields a set of points on a chromaticity diagram that can
be connected by straight lines. The volume spanned in this manner represents the
range of colors that can be reproduced by the additive mixture of these primaries.
Examples of 3-primary systems are shown in Figure 21.7.
Chromaticity diagrams provide insight into additive color mixtures. However,
they should be used with care. First, the interior of the horseshoe should not
be colored, as any color reproduction system will have its own primaries and
can only reproduce some parts of the chromaticity diagram. Second, as the CIE
color matching functions do not represent human cone sensitivities, the distance
between any two points on a chromaticity diagram is not a good indicator for how
differently these colors will be perceived.
A more uniform chromaticity diagram was developed to at least in part ad-
dress the second of these problems. The CIE u
v
chromaticity diagram provides
a perceptually more uniform spacing and is therefore generally preferred over
(x, y) chromaticity diagrams. It is computed from (X, Y, Z) tristimulus values
by applying a different normalization,
u
=
4X
X +15Y +3Z
,
v
=
9Y
X +15Y +3Z
.

i
i
i
i
i
i
i
i
542 21. Color
u'
v'
Figure 21.8. The CIE u
v
chromaticity diagram. (See also Plate XXX.)
and can alternatively be computed directly from (x, y) chromaticity coordinates:
u
=
4x
−2x +12y +3
,
v
=
9y
−2x +12y +3
.
ACIEu
v
chromaticity diagram is shown in Figure 21.8.
21.2 Color Spaces
As explained above, each color can be represented by three numbers, for instance
defined by (X, Y, Z) tristimulus values. However, its primaries are imaginary,
meaning that it is not possible to construct a device that has three light sources
(all positive) that can reproduce all colors in the visible spectrum.
For the same reason, image encoding and computations on images may not
be practical. There is, for instance, a large number of possible XY Z values that
do not correspond to any physical color. This would lead to inefficient use of
available bits for storage and to a higher requirement for bit-depth to preserve
visual integrity after image processing. Although it may be possible to build a
capture device that has primaries that are close to the CIE XY Z color matching
functions, the cost of hardware and image processing make this an unattractive
option. It is not possible to build a display that corresponds to CIE XY Z.For
these reasons, it is necessary to design other color spaces: physical realizability,
efficient encoding, perceptual uniformity, and intuitive color specification.
The CIE XYZ color space is still actively used, mostly for the conversion
between other color spaces. It can be seen as a device-independent color space.
i
i
i
i
i
i
i
i
21.2. Color Spaces 543
Other color spaces can then be defined in terms of their relationship to CIE XY Z,
which is often specified by a specific transform. For instance, linear and additive
trichromatic display devices can be transformed to and from CIE XY Z by means
of a simple 3 × 3 matrix. Some nonlinear additional transform may also be speci-
fied, for instance to minimize perceptual errors when data is stored with a limited
bit-depth, or to enable display directly on devices that have a nonlinear relation-
ship between input signal and the amount of light emitted.
21.2.1 Constructing a Matrix Transform
For a display device with three primaries, say red, green, and blue, we can mea-
sure the spectral composition of the emitted light by sending the color vectors
(1, 0, 0), (0, 1, 0),and(0, 0, 1). These vectors represent the three cases namely
where one of the primaries is full on, and the other two are off. From the measured
spectral output, we can then compute the corresponding chromaticity coordinates
(x
R
,y
R
), (x
G
,y
G
),and(x
B
,y
B
).
The white point of a display is defined as the spectrum emitted when the color
vector (1, 1, 1) is sent to the display. Its corresponding chromaticity coordinate is
(x
W
,y
W
). The three primaries and the white point characterize the display and
are each required to construct a transformation matrix between the display’s color
space and CIE XYZ.
These four chromaticity coordinates can be extended to chromaticity triplets
reconstructingthe z-coordinatefrom z =1−x−y, leading to triplets (x
R
,y
R
,z
R
),
(x
G
,y
G
,z
G
), (x
B
,y
B
,z
B
),and(x
W
,y
W
,z
W
). If we know the maximum lumi-
nance of the white point, we can compute its corresponding tristimulus value
(X
W
,Y
W
,Z
W
) and then solve the following set of equations for the luminance
ratio scalars S
R
, S
G
,andS
B
:
X
W
= x
R
S
R
+ x
G
S
G
+ x
B
S
B
,
Y
W
= y
R
S
R
+ y
G
S
G
+ y
B
S
B
,
Z
W
= z
R
S
R
+ z
G
S
G
+ z
B
S
B
.
The conversion between RGB and XYZ is then given by
⎡
⎣
X
Y
Z
⎤
⎦
=
⎡
⎣
x
R
S
R
x
G
S
G
x
B
S
B
y
R
S
R
y
G
S
G
y
B
S
B
z
R
S
R
z
G
S
G
z
B
S
B
⎤
⎦
⎡
⎣
R
G
B
⎤
⎦
.
The luminance of any given color can be computed by evaluating the middle row
of a matrix constructed in this manner:
Y = y
R
S
R
R + y
G
S
G
G + y
B
S
B
B.

i
i
i
i
i
i
i
i
544 21. Color
RGBWhite
x 0.6400 0.3000 0.1500 0.3127
y 0.3300 0.6000 0.0600 0.3290
Figure 21.9. The (x, y) chromaticity coordinates for the primaries and white point specified
by ITU-R BT.709. The sRGB standard also uses these primaries and white point.
To convert between XYZ and RGB of a given device, the above matrix can
simply be inverted.
If an image is represented in an RGB color space for which the primaries and
white point are unknown, then the next best thing is to assume that the image was
encoded in a standard RGB color space. A reasonable choice is then to assume
that the image was specified according to ITU-R BT.709, which is the specifica-
tion used for encoding and broadcasting of HDTV. Its primaries and white point
are specified in Table 21.9. Note that the same primaries and white point are used
to define the well-known sRGB color space. The transformation between this
RGB color space and CIE XYZ is and vice-versa given by
⎡
⎣
X
Y
Z
⎤
⎦
=
⎡
⎣
0.4124 0.3576 0.1805
0.2126 0.7152 0.0722
0.0193 0.1192 0.9505
⎤
⎦
⎡
⎣
R
G
B
⎤
⎦
;
⎡
⎣
R
G
B
⎤
⎦
=
⎡
⎣
3.2405 −1.5371 −0.4985
−0.9693 1.8706 0.0416
0.0556 −0.2040 1.0572
⎤
⎦
⎡
⎣
X
Y
Z
⎤
⎦
.
By
substituting the maximum RGB values of the device, we can compute
the white point. For ITU-R BT.709, the maximum values are (R
W
,G
W
,B
W
)=
(100, 100, 100), leading to a white point of (X
W
,Y
W
,Z
W
)=(95.05, 100.00,
108.90).
In addition to a linear transformation, the sRGB color space is characterized
by a subsequent nonlinear transform. The nonlinear encoding is given by
R
sRGB
=
1.055 R
1/2.4
− 0.055 R>0.0031308,
12.92 RR≤ 0.0031308;
G
sRGB
=
1.055 G
1/2.4
− 0.055 G>0.0031308,
12.92 GG≤ 0.0031308;
B
sRGB
=
1.055 B
1/2.4
− 0.055 B>0.0031308,
12.92 BB≤ 0.0031308.
This nonlinear encoding helps minimize perceptual errors due to quantization er-
rors in digital applications.
i
i
i
i
i
i
i
i
21.2. Color Spaces 545
21.2.2 Device-Dependent RGB Spaces
As each device typically has its own set of primaries and white point, we call the
associated RGB color spaces device-dependent. It should be noted that even if all
these devices operate in an RGB space, they may have very different primaries
and white points. If we therefore have an image specified in some RGB space, it
may appear very different to us, depending upon which device we display it.
This is clearly an undesirable situation, resulting from a lack of color man-
agement. However, if the image is specified in a known RGB color space, it can
first be converted to XYZ, which is device independent, and then subsequently it
can be converted to the RGB space of the device on which it will be displayed.
There are several other RGB color spaces that are well defined. They each
consist of a linear matrix transform followed by a nonlinear transform, akin to the
aforementioned sRGB color space. The nonlinear transform can be parameterized
as follows:
R
nonlinear
=
(1 + f) R
γ
− ft<R≤ 1,
sR 0 ≤ R ≤ t;
G
nonlinear
=
(1 + f) G
γ
− ft<G≤ 1,
sG 0 ≤ G ≤ t;
B
nonlinear
=
(1 + f) B
γ
− ft<B≤ 1,
sB 0 ≤ B ≤ t.
The parameters s, f, t and γ together with primaries and white point specify a
class of RGB color spaces that are used in various industries. Several common
transformations are listed in Table 21.10.
21.2.3 LMS Cone Space
The aforementioned cone signals can be expressed in terms of the CIE XYZ color
space. The matrix transform to compute LMS signals from XY Z and vice-versa
are given by
⎡
⎣
L
M
S
⎤
⎦
=
⎡
⎣
0.38971 0.68898 −0.07868
−0.22981 1.18340 0.04641
0.00000 0.00000 1.00000
⎤
⎦
⎡
⎣
X
Y
Z
⎤
⎦
;
⎡
⎣
X
Y
Z
⎤
⎦
=
⎡
⎣
1.91019 −1.11214 0.20195
0.37095 0.62905 0.00000
0.00000
0.00000 1.00000
⎤
⎦
⎡
⎣
L
M
S
⎤
⎦
.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.