
The view_frames tool creates a diagram of the frames being broadcast by TF over ROS:
$ rosrun tf view_frames $ evince frames.pdf
The diagram is shown as follows:
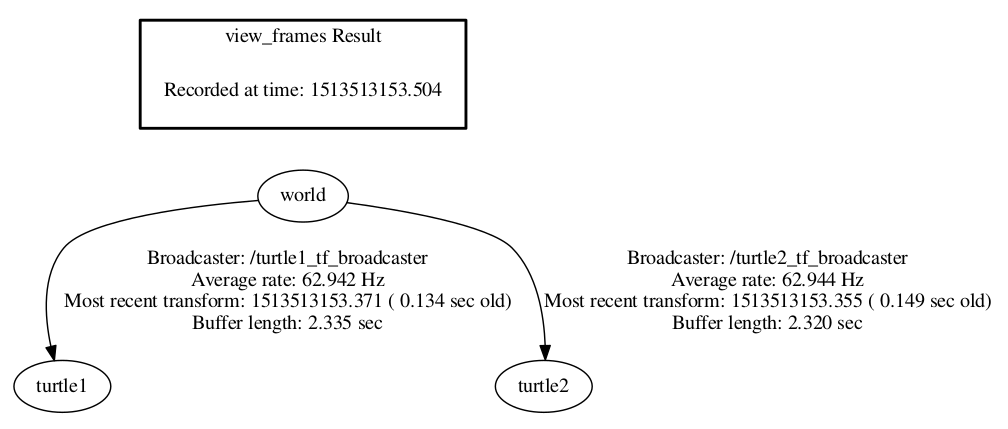
Showing TF relation between turtle1 and turtle2
Here, you may have noticed that three frames are broadcast by TF—the world, turtle1, and turtle2, where the world frame is the parent of the turtle1 and turtle2 frames.