
In the previous section, we discussed almost all the visualizations that are necessary to view the navigation stack in RViz. These will be useful to find out whether the robot is doing something unusual. In addition, we can also look for a general ROS navigation system view of the running system using rqt_graph, which is shown in the following flow chart:
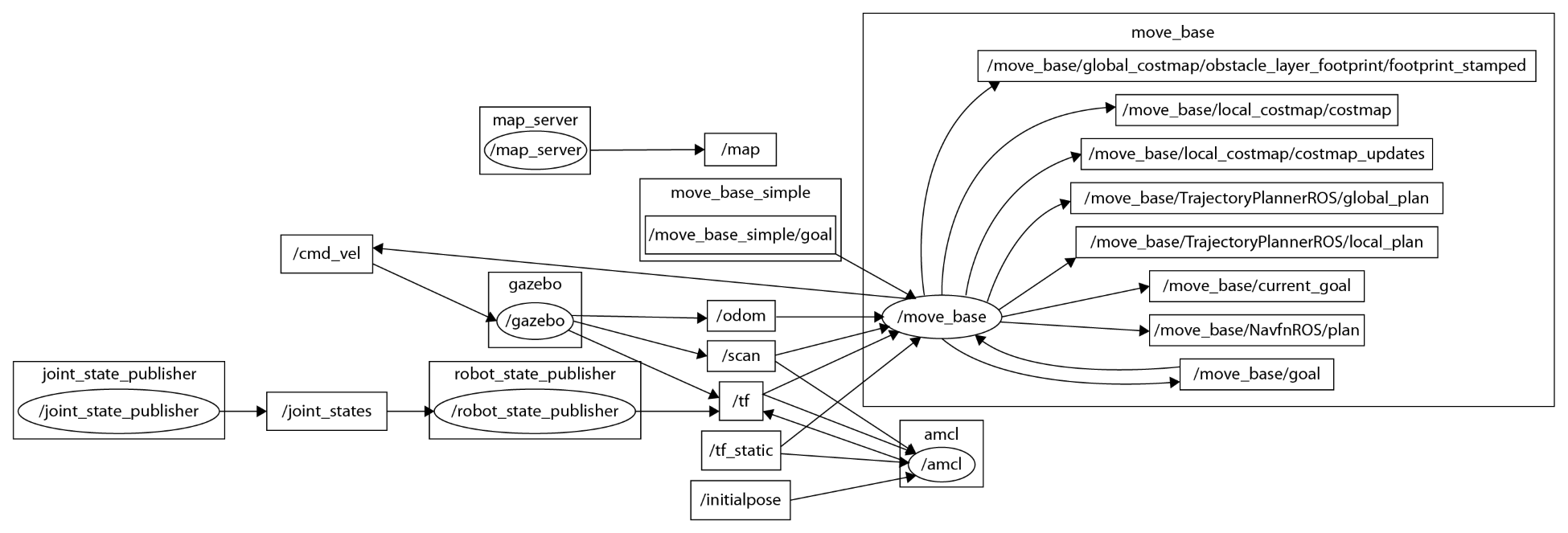
ROS navigation system view
The ROS navigation system view, which is shown in the preceding flow chart, is generated by using the rqt_graph tool. This may be not clear in the print version of this book; however, it is placed here for completeness and understanding.