
Similar to an operating system, an ROS filesystem is divided into folders, and these folders have files that describe their functionalities:
ROS package
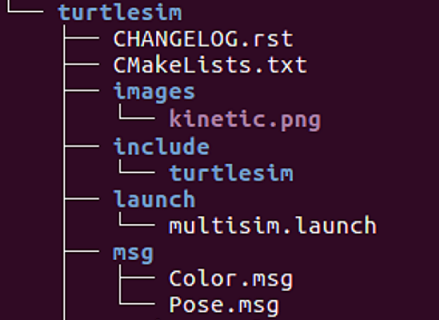
- ROS Packages: The ROS software is organized in the form of packages, as a primary unit. A package might contain ROS nodes (processes), ROS-independent library, configuration files and so on, which could be logically define as a complete software module. For example, chapter2_tutorials is one of the simple packages.
- The ROS Package Manifest: The package manifest is an XML file called package.xml, which must be included in the package folder. This file contains information about the package, such as the package name, version, authors, maintainers, license, compilation flags, and dependencies on other packages. The system package dependencies are also declared in package.xml, which is essential to build any package from the source on any given machine.
- ROS Messages: In the ROS framework, nodes communicate with each other asynchronously by publishing messages to topics, which is defined as a simple data structure. The message file consists of typed fields and is placed inside the msg folder of a package that has the file extension .msg.
- ROS Services: ROS nodes can also exchange a request and response message as part of a ROS service call synchronously. These request and response messages are defined as .srv files inside the srv folder of a package.
- The ROS Metapackage Manifests: Although the metapackage manifests package.xml, are similar to the package manifest, they are specialized packages in the ROS catkin build system, which does not contain any code, files, or other items except the package.xml manifest. A metapackage defines the virtual packages used in the Debian packaging world and provides references to one or more related packages grouped together.
- The ROS Metapackages: It combines several packages in a group for a special purpose and functionality, such as a navigation task. However, in older versions of ROS such as Electric and Fuerte, it was called stacks, but later it was removed and metapackages came into existence. The metapackages could be seen as a simpler and easy representation of package stack. One of the examples of a meta package is the ROS navigation stack.