
At the same time, we can see a new global plan to avoid the obstacle in the RViz window. This feature is most interesting when the robot is moving in real environments surrounded by static and dynamic obstacles. If the robot detects a possible collision, it will change direction, and try to arrive at the goal through an alternate path.
It is important to know that the detection of such obstacles is confined into the area covered by the local planner costmap (for example, 5 x 5 meters around the robot). We can view this feature in the following screenshot:
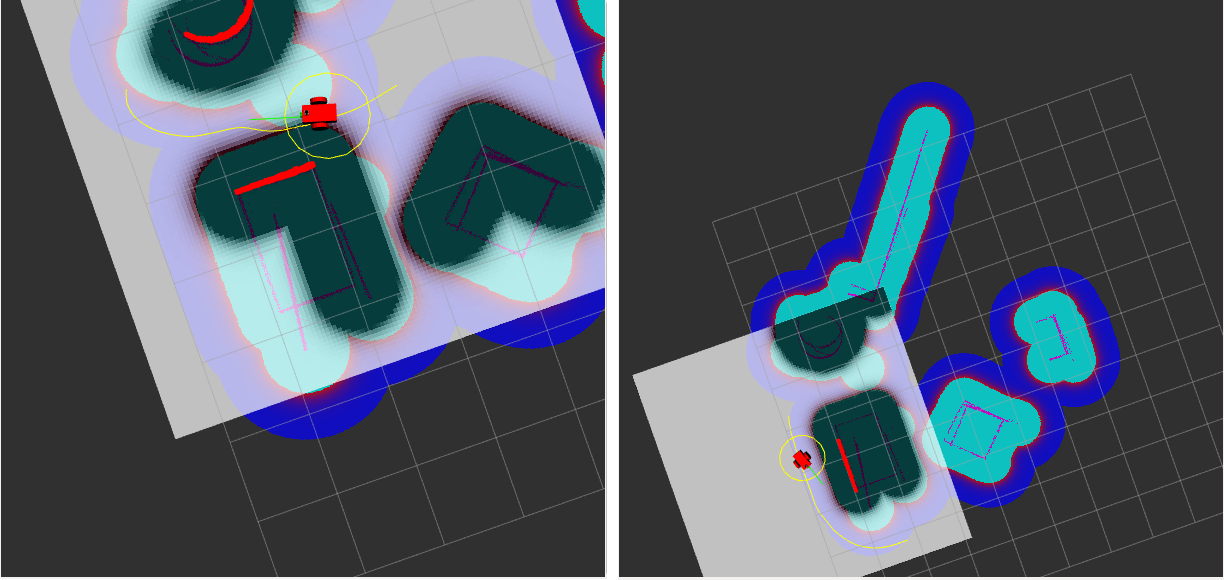
Obstacle avoidance