
To start, we are simply going to launch the MoveIt Rviz environment and begin doing some tests regarding motion planning.
We will execute the following command in order to start the MoveIt RViz demo environment:
$roslaunch myrobot_moveit_config demo.launch
If everything goes fine, we will see something like this:

Now, we will move to the Planning tab, as shown in the following screenshot:
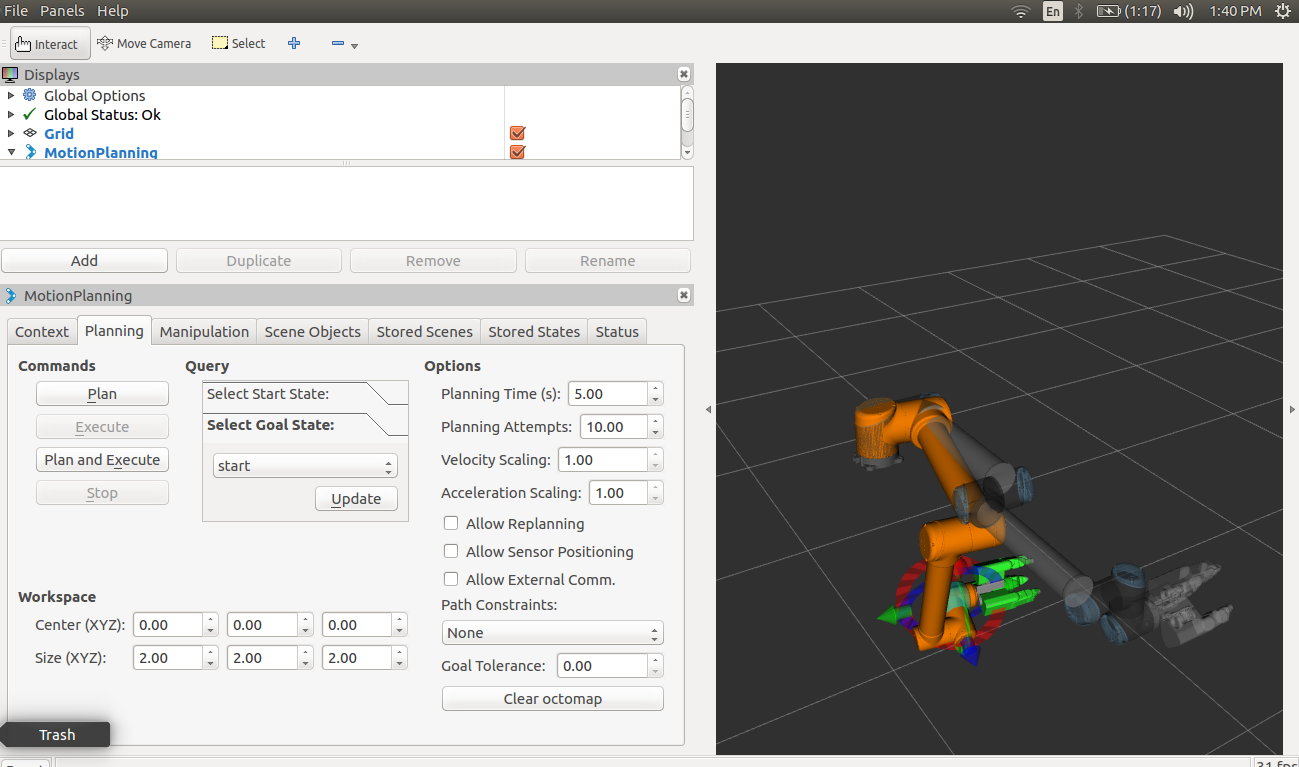
Before we start planning anything, it is always a good practice to update the current start state. Therefore, in the Query section, in Select Goal State, we will choose the start option (which we used for one of the poses that we defined in the previous subsection) and click on the Update button. Our robot scene will be updated with the new position that has been selected.
Now, we can click on the Plan button in the Commands section. The robot will begin to plan a trajectory to reach that point, as shown in the following screenshot:
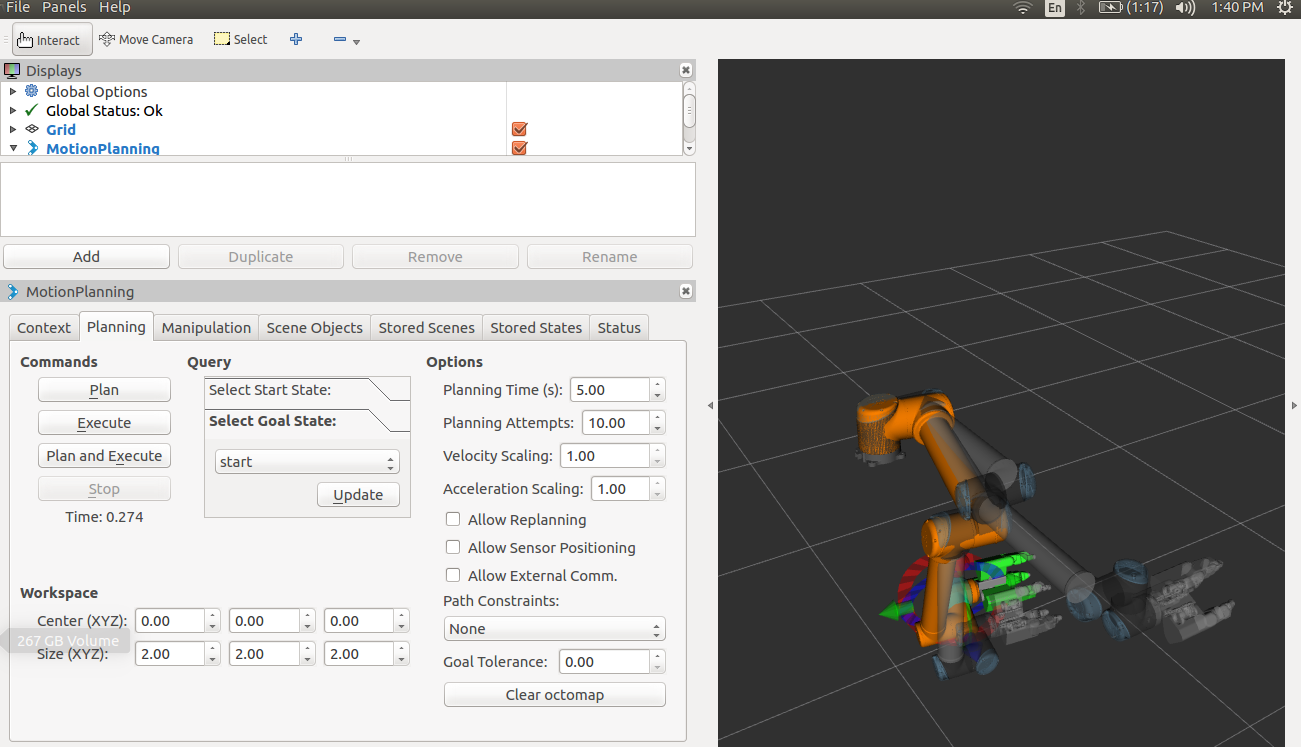
Finally, if we click on the Execute button, the robot will execute that trajectory.
We have just played around with the new tool! We can repeat this process again if we wish to, but with different options selected. For instance, instead of moving the robot to the start position, we could set a random valid position as the goal. We could also try to check and uncheck the different visualization options that appear in the upper Displays section.