
This displays the particle cloud used by the robot's localization system where the of the cloud represents the localization system's uncertainty about the robot's pose. We will obtain the following cloud for our robot, which is shown in the following screenshot:
- Topic: particlecloud
- Type: geometry_msgs/PoseArray
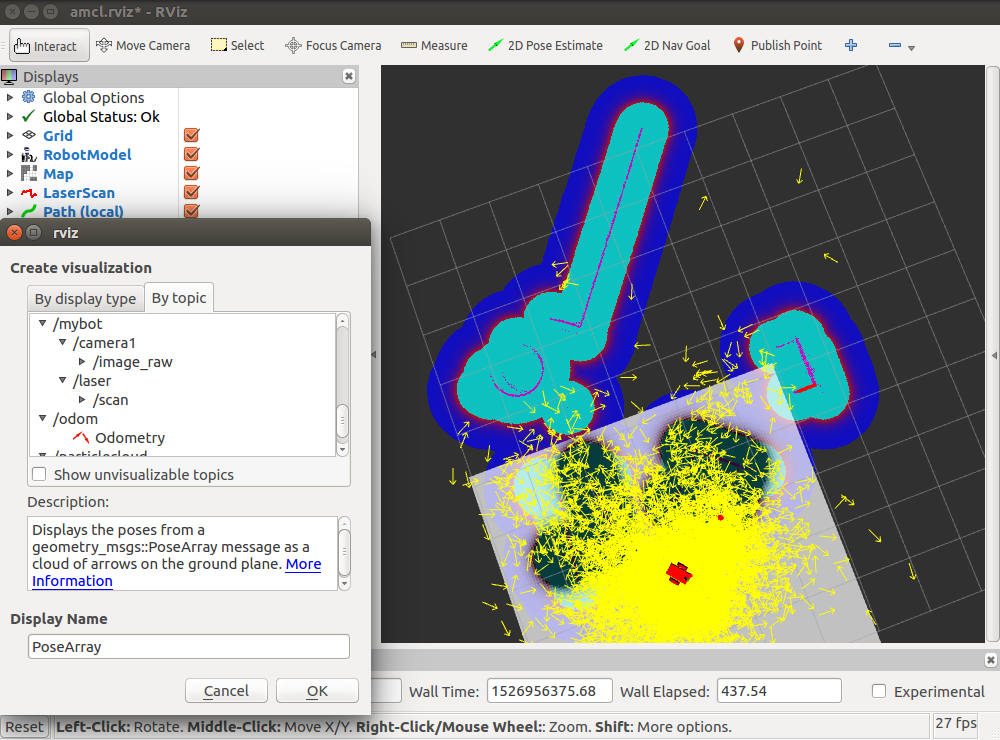
Particle cloud for localization