
The planner plan displays the full plan for the robot, computed by the global planner, which is shown in the following screenshot. It looks very similar to the global plan path:
- Topic: NavfnROS/plan
- Type: nav_msgs/Path
See the following screenshot:
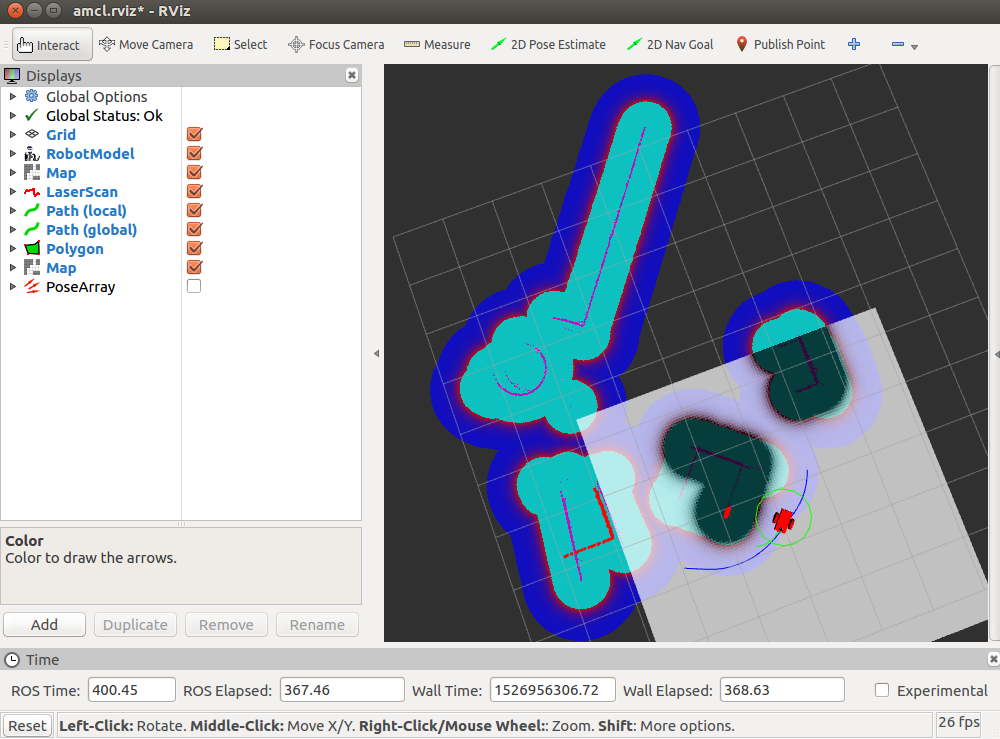
Planner path