
Let's start with a quick look at the MoveIt architecture. Understanding the architecture of MoveIt! helps to program and interface the robot to MoveIt. Here, we can have a look at the following diagram showing the MoveIt architecture:
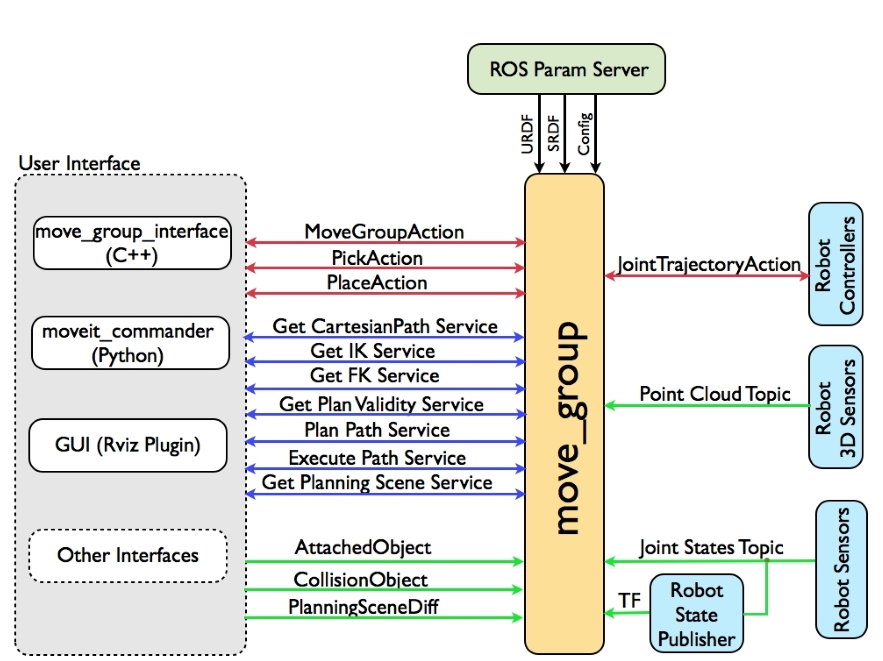
We can say that move_group is the heart of MoveIt, as this node acts as an integrator of the various components of the robot and delivers actions/services according to the user's needs.
The move_ group node collects robot information, such as the PointCloud, the joint state of the robot, and the transforms (TFs) of the robot in the form of topics and services.
From the parameter server, it collects the robot kinematics data, such as robot description (URDF), Semantic Robot Description Format (SRDF), and the configuration files. The SRDF file and the configuration files are generated when we generate a MoveIt! package for our robot. The configuration files contain the parameter file for setting joint limits, perception, kinematics, end effector, and so on. These are the files that have been created in the config folder of your package.