
Chapter 2
Anatomy of a Robot
The human body is, all things considered, a nearly perfect machine: it’s (usually) intelligent, it can lift heavy loads, it can move itself around, and it has built-in protective mechanisms to feed itself when hungry and to run away when threatened. Other living creatures possess similar functions, though not always to the same degree of sophistication.
Robots are often modeled after humans, if not in form then at least in function. Nature provides a striking model for robot experimenters to mimic. It’s up to us to take the challenge. Some of the mechanisms found in nature can be duplicated in the robot shop. Robots can be built with eyes to see, ears to hear, a mouth to speak—all with the goal of manipulating the environment and exploring the surroundings.
This is fine theory. What about real life? What basic parts must a machine have before it’s given the title “robot”? Let’s take a close look in this chapter at the anatomy of robots and the kinds of materials hobbyists use to construct them. For the sake of simplicity, not every robot subsystem ever made is covered here, just the ones most often found in amateur robots.
Stationary versus Mobile Robots
When we think of robots most of us envision a machine that walks around on legs or scoots across the floor on wheels.
In fact, the most common robots stay put and manipulate some object placed in front of them. These are often used in manufacturing, and they are stationary—they’re bolted to the ground. Such stationary robots, like the one in Figure 2-1, assist in making cars, appliances, even other robots!
Conversely, mobile robots (see Figure 2-2) are designed to move from one place to another. Wheels, tracks, or legs allow the robot to traverse a terrain. Mobile robots may also feature an armlike appendage that allows them to manipulate objects around them. Of the two—stationary or mobile—the mobile robot is probably the more popular project for hobbyists to build. There’s something endearing about a robot that scampers across the floor, either chasing or being chased by the cat.

Figure 2-1 Stationary robots don’t move. They sit on a tabletop or (for industrial applications) bolt into the ground.
As a serious robot experimenter, don’t overlook the challenge of building both types of robots. Stationary bots typically require greater precision, power, and balance, since they are designed to grasp and lift things—hopefully not destroying whatever it is they’re handling. Likewise, mobile robots present their own difficulties: maneuverability, adequate power supply, and avoiding collisions among them.
Autonomous versus Teleoperated Robots
The first robots ever demonstrated for a live audience were fake; they were actually machines remotely controlled by a person offstage. No matter. People thrilled at the concept of the robot, which many anticipated would be an integral part of their near futures. You know, like flying to work in your own helicopter and colonies on Mars by 1975 … yeah, right!
These days, the classic view of the robot is a fully autonomous machine, like Robby from Forbidden Planet, Robot B-9 from Lost in Space, or that R2-D2 thingie from Star Wars. With these robots (or at least the make-believe, fictional versions), there’s no human operator, no remote control, no “man behind the curtain.”
While many actual robots are indeed fully autonomous, many of the most important robots of the past few decades have been teleoperated. A tele-operated robot is one that is commanded by a human and operated by remote control. These are often used in police and combat situations, like the one in Figure 2-3. The typical telerobot uses a video camera that serves as the eyes for the human operator. From some distance—perhaps as near as a few feet to as distant as several million miles—the operator views the scene before the robot and commands it accordingly.

Figure 2-2 Mobile robots move, typically using wheels or tracks but also legs and other forms of propulsion.

Figure 2-3 A telerobot requires a human operator to control it. The robot is usually semiautonomous, taking basic instructions via wireless feed and performing intelligent tasks. (Photo courtesy iRobot Corporation.)
The teleoperated robot of today is a far cry from the radio-controlled robots of the world’s fairs of the 1930s and ’40s. Many telerobots, like the world-famous Mars rover Sojourner, the first interplanetary dune buggy, are actually half remote controlled and half autonomous. The low-level functions of the robot are handled by a microprocessor on the machine. The human intervenes to give general-purpose commands, such as “go forward 10 feet” or “hide, here comes a Martian!” The robot carries out basic instructions on its own, freeing the human operator from the need to control every small aspect of the machine’s behavior.

The notion of telerobotics is certainly not new—it goes back to at least the 1940s and the short story “Waldo” by noted science fiction author Robert Heinlein. It was a fantastic idea at the time, but today modern science makes it eminently possible, even for garage-shop tinkerers.
Stereo video cameras give a human operator 3D depth perception. Sensors on motors and robotic arms provide feedback to the human operator, who can actually feel the motion of the machine or the strain caused by some obstacle. Virtual-reality helmets, gloves, and motion platforms literally put the operator “in the driver’s seat.”
Tethered versus Self-Contained Robots
People like to debate what makes a machine a “real” robot. One side says that a robot is a completely self-contained, autonomous (self-governed) machine that needs only occasional instructions from its master to set it about its various tasks. A self-contained robot has its own power system, brain, wheels (or legs or tracks), and manipulating devices such as claws or hands. This robot does not depend on any other mechanism or system to perform its tasks. It’s complete in and of itself.
The other side says that a robot is anything that moves under its own motor power for the purpose of performing tasks that appear to involve intelligence or intent. The mechanism that does the actual task is the robot itself; the support electronics or components may be separate. The link between the robot and its control components might be a wire, a beam of infrared light, or a radio signal.
In the experimental robot from 1969 shown in Figure 2-4, for example, a man sat inside the mechanism and operated it, almost as if driving a car. The purpose of the four-legged “lorry” was not to create a self-contained robot but to further the development of cybernetic anthropomorphous machines. These were otherwise known as cyborgs, a concept further popularized by writer Martin Caidin in his 1972 novel Cyborg (which served as the inspiration for the ’70s television series The Six Million Dollar Man).
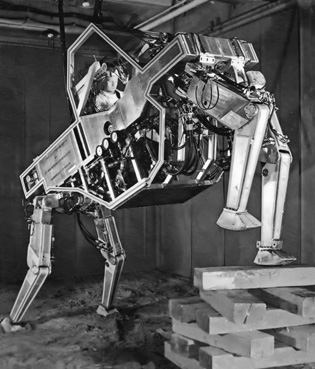
Figure 2-4 This quadruped from General Electric was controlled by a human operator who sat inside it. The robot was developed in the late 1960s under a contract with the U.S. government. (Photo courtesy General Electric.)
So, What’s a Robot, Anyway?
I’m not going to argue robot semantics here—this book is a treasure map after all, not a textbook on theory. But it’s still necessary to establish some of the basic characteristics of robots.
What makes a robot a robot and not just another machine? For the purposes of this book, let’s consider a robot as any device that—in one way or another—mimics human or animal functions. The way the robot does this is of no concern; the fact that it does it at all is enough.
The functions that are of interest to us as robot builders run the gamut: from listening to sounds and acting on them, to talking and walking or moving across the floor, to picking up objects and sensing special conditions such as heat, flames, or light. So, when we talk about a robot, it could very well be—
![]() A self-contained automaton that takes care of itself, perhaps even programming its own brain and learning from its surroundings and environment.
A self-contained automaton that takes care of itself, perhaps even programming its own brain and learning from its surroundings and environment.
![]() Or it could be a small motorized cart operated by a strict set of predetermined instructions that repeats the same task over and over again until its batteries wear out.
Or it could be a small motorized cart operated by a strict set of predetermined instructions that repeats the same task over and over again until its batteries wear out.
![]() Or it could be a radio-controlled arm that you operate manually from a control panel.
Or it could be a radio-controlled arm that you operate manually from a control panel.
Each is no less a robot than the others, though some are more useful and flexible. As you’ll discover throughout this book, you’re in control in defining how complex your robot creations are.
The Body of the Robot
For most robots, its body holds all its vital parts. The body is the superstructure that prevents its electronic and electromechanical guts from spilling out. Robot bodies go by many names, including platform, frame, base, and chassis, but the idea is the same. The bodies of robots differ in size, shape, and style; their type of superstructure; and their overall construction.
ROBOT SIZE, SHAPE, AND STYLE
Robots come in all sizes. Some can fit in the palm of your hand, while others are so big it takes two people to lift them from the worktable.
Homebrew robots are generally the size of a small cat or dog, although some are as compact as an aquarium turtle and a few as large as Arnold Schwarzenegger (if one of these asks you, “Are you Sarah Conner?,” answer “No!”). The overall shape of the robot is generally dictated by the internal components that make up the machine, but most designs fall into one of the following “categories”:
![]() Turtle (or desktop)
Turtle (or desktop)
![]() Rover
Rover
![]() Walking
Walking
![]() Arms/grippers (also called appendages)
Arms/grippers (also called appendages)
![]() Android and humanoid
Android and humanoid
Smaller robots are not only easier to build, but they are also more affordable. Their smaller size means smaller motors, smaller batteries, and smaller chassis—all of which tend to reduce price.
Turtle or Desktop
Turtle or so-called desktop robots are simple and compact. As the wording implies, these creations are designed primarily for “tabletop robotics.” Turtlebots get their name because their bodies somewhat resemble the shell of a turtle. Researcher W. Grey Walter used the term to describe a series of small robots he envisioned and built in about 1948. In popular usage, turtle robots also borrow their name from a once-popular programming language, Logo turtle graphics, adapted for robotics use in the 1970s.
The turtle category represents the majority of amateur robots (Figure 2-5 shows one of them). It’s popular among those involved in noncombat competitions—things like maze following or robotic soccer. Turtle robots are most commonly powered by a rudimentary brain (BEAM robotics, based on simplified electronics, is a good example) or by a small single-chip computer or microcontroller.

Figure 2-5 Small turtle-sized robots represent a class that’s easy and inexpensive to build. They are ideal for learning about robotic design, construction, and programming.

Figure 2-6 A rewarding project is a multilegged walking robot, such as this model that has six legs. It’s operated using three individual motors per leg, for a total of 18 motors. (Photo courtesy Lynxmotion.)
Rover
The rover category is any of a group of rolling or tracked robots designed for applications that require some horsepower, such as vacuuming the floor, fetching a can of beer or soda, or mowing the lawn. These robots are too big to play with on a desk or tabletop. Sizes range from that of a waffle iron and continue on up. The “death match” combat robots popular on TV are typical robots in the larger end of the rover spectrum, where weight is important to winning.
Because of their larger size, rover robots can be powered—brainwise—by everything from a simple transistor to a desktop computer. Old laptops, particularly the monochrome models, are popular among many robot builders because they can run MS-DOS or early versions of Microsoft Windows, and they can be connected to the robot via standard interface ports.
Walking
A walking robot uses legs, not wheels or treads, to move about. Most walker bots have six legs, like an insect, as the six legs provide excellent support and balance. However, gaining in popularity are two-and four-legged walkers, both for “scratch-build” hobby projects as well as for commercial kits.
An example of a six-legged walking robot kit is the Phoenix, from Lynxmotion (Figure 2-6). It’s made by combining radio control servo motors and prefabricated plastic and metal parts.
Walking robots require a greater precision in building. The design of the typical robot that rolls on wheels or even tank treads is inherently simpler than that required for the cams, links, levers, and other mechanisms used for walking. For this reason, beginners in the robot-building trade should opt for wheeled designs first to gain experience, even if the walking robot looks cooler.
Note that two-legged walking robots that resemble people are classified (see below) in their own category, considering the technological difficulties in designing and building them. Constructing a small two-legged robot that hobbles along the desk is one thing; creating a C-3PO-like robot is quite another, even if your name is Anakin Skywalker.
Arms and Grippers
The ability to manipulate objects is a trait that has enabled humans, as well as a few other creatures in the animal kingdom, to take command of their environment. Without our arms and hands we wouldn’t be able to use tools, and without tools we wouldn’t be able to build houses, cars, and—hmmm—robots.
Arms and grippers are used by themselves in stationary robots, or they can be attached to a mobile robot. An arm can be considered any appendage of the robot that can be individually and specifically manipulated; grippers (also called end-effectors) are the hands and fingers and can be attached either directly to the robot or to an arm.
The human arm has joints that provide various degrees of freedom (DOF) for orienting it to most any direction. Likewise, robotic arms also have degrees of freedom. In most designs the number of degrees of freedom is fairly limited, to between one and three DOF. In addition to degrees of freedom, robot arms are further classified by the shape of the area that the end of the arm (where the gripper is) can reach. This accessible area is called the work envelope. Read more about these in Chapter 28, “Experimenting with Robotic Arms.”
You can duplicate human arms in a robot with just a couple of motors, some metal rods, and a few other parts. Add a gripper to the end of the robot arm and you’ve created a complete arm-hand module. Of course, not all robot arms are modeled after the human appendage. Some look more like forklifts than arms, and a few use retractable push rods to move a hand or gripper toward or away from the robot.
Robot grippers come in a variety of styles; few are designed to emulate the human counterpart. A functional robot claw can be built that has just two fingers. The fingers close like a vise and can exert, if desired, a surprising amount of pressure. See Chapter 29, “Experimenting with Robotic Grippers,” for more information.
Android and Humanoid
Android and humanoid robots are specifically modeled after the human form: a head, torso, two legs, and possibly one or two arms. In current usage, the terms android and humanoid are not the same: an android is a robot designed to look as much like a human being as possible, including ears, hair, and even an articulated mouth. A humanoid robot is one that shares the basic architecture of a human—bipedal (two legs), head at the top, two arms at the side—but is not meant to be a physiological replica.
Figure 2-7 shows an example humanoid bipedal robot that you can actually build; Figure 2-8 shows a make-believe android bot that for most hobbyists is beyond the reach of pocket-book and technology. Menacing grin optional.
Whether a true android or a humanoid, this category of robots is something of the Holy Grail of robot builders and is also the most difficult to create. Because of the added complexities in the design, the cost of construction is much higher than with other forms of robots—spending $300+ in parts is not uncommon.

Figure 2-7 Bipedal (two-legged) robots present special challenges, not only in construction, but in programming. Standardized metal brackets, like those used here, make building easier by not requiring you to have a complete metalworking shop in your garage (though if you do, by all means use it!). (Photo courtesy Lynxmotion.)
Figure 2-8 Androids take a human form, with head, torso, two arms, and two legs. These designs are the most difficult to achieve, even for companies spending millions of dollars in research and development. The robot shown here, drawn by a 3D modeling program, exists only in the imagination. For now, anyway.
The compelling rationale of human-shaped robotics is that since the machine walks on two legs, it can live and work in the same environment as humans. Contrast this with a robot that must roll on wheels or tracks: stairs become difficult, and even clothing discarded on the floor can impede the motion of the robot.
SKELETAL STRUCTURE
In nature and in robotics, there are two general types of support frames: endoskeleton and exoskeleton. Which is better? Neither and both: In nature, the living conditions of the animal and its eating and survival tactics determine which skeleton is best. The same is true of robots.
![]() Endoskeleton support frames are the kind found in many critters—including humans, mammals, reptiles, and most fish. The skeletal structure is on the inside; the organs, muscles, body tissues, and skin are on the outside of the bones. The endoskeleton is a characteristic of vertebrates.
Endoskeleton support frames are the kind found in many critters—including humans, mammals, reptiles, and most fish. The skeletal structure is on the inside; the organs, muscles, body tissues, and skin are on the outside of the bones. The endoskeleton is a characteristic of vertebrates.
![]() Exoskeleton support frames have the “bones” on the outside of the organs and muscles. Common exoskeletal creatures are spiders, all shellfish such as lobsters and crabs, and an endless variety of insects.
Exoskeleton support frames have the “bones” on the outside of the organs and muscles. Common exoskeletal creatures are spiders, all shellfish such as lobsters and crabs, and an endless variety of insects.
The main structure of the robot is generally a wood, plastic, or metal frame, which is constructed a little like the frame of a house—with a bottom, top, and sides. This gives the automaton a boxy or cylindrical form, though any shape is possible.
Onto the frame of the robot are attached motors, batteries, electronic circuit boards, and other necessary components. In this design, the main support structure of the robot can be considered an exoskeleton because it is outside the major organs.
A shell or covering is sometimes placed over these robots, but the “skin” is for looks only (and sometimes the protection of the internal components), not support. For the most part, the main bodies of your robots will have exoskeleton support structures because they are cheaper to build, stronger, and less prone to problems.
FLESH AND BONE—AND WOOD, PLASTIC, OR METAL
In the 1926 movie classic Metropolis, Rotwang—a disgruntled scientist—transforms a cold and calculating robot into the body of a beautiful woman. This film, generally considered to be the first science fiction cinema epic, also set the psychological stage for later movies about robots, particularly those of the 1940s and ’50s.
The shallow and stereotypical character of Rotwang and his robot creation, shown in the movie still in Figure 2-9, proved to be a common theme in countless movies since. The shapely robotrix changed form for these other films, but not its evil character. Robots have often been depicted as metal creatures with hearts as cold as their steel bodies.
Which brings us to an interesting question: Are all “real” robots made of heavy-gauge steel, stuff so thick that bullets, disinto-ray guns, even atomic bombs can’t penetrate? Yes, metal is a common part of many kinds of robots, but the list of materials you can use is much larger and more diverse.
![]() Wood. Wood is an excellent material for robot bodies, especially multi-ply hardwoods, like the kind used for model airplanes and model sailboats. Common thicknesses are ⅛″ to ½″—perfect for most robot projects. Read up on wood robots in Chapter 7, “Working with Wood.”
Wood. Wood is an excellent material for robot bodies, especially multi-ply hardwoods, like the kind used for model airplanes and model sailboats. Common thicknesses are ⅛″ to ½″—perfect for most robot projects. Read up on wood robots in Chapter 7, “Working with Wood.”
![]() Plastic. Plastic boasts high strength, but is easier to work with than metal. You can cut it, shape it, drill it, even glue it, with common, everyday tools. My favorite is PCV expanded plastic. These sheets are known by various trade names such as Sintra, and they are available at industrial plastics supply outlets. Cheap and easy to work with. See Chapter 9, “Working with Plastic,” for more details.
Plastic. Plastic boasts high strength, but is easier to work with than metal. You can cut it, shape it, drill it, even glue it, with common, everyday tools. My favorite is PCV expanded plastic. These sheets are known by various trade names such as Sintra, and they are available at industrial plastics supply outlets. Cheap and easy to work with. See Chapter 9, “Working with Plastic,” for more details.
![]() Foamboard. Art supply stores stock what’s known as foamboard (or Foam Core), a special construction material typically used for building models. It’s really a sandwich of paper or plastic glued to both sides of a layer of densely compressed foam. You can cut it with a knife or small hobby saw. Great stuff for quickie-made bots. I talk about foamboard and similar materials in Chapter 14, “Rapid Prototyping Methods.”
Foamboard. Art supply stores stock what’s known as foamboard (or Foam Core), a special construction material typically used for building models. It’s really a sandwich of paper or plastic glued to both sides of a layer of densely compressed foam. You can cut it with a knife or small hobby saw. Great stuff for quickie-made bots. I talk about foamboard and similar materials in Chapter 14, “Rapid Prototyping Methods.”

Figure 2-9 The misguided Rotwang, and his robot, from the 1927 movie classic Metropolis. This is the shape of the robot before it’s transformed to look like a woman, a teacher leading a peaceful worker’s rebellion.
![]() Aluminum. If you want to go metal, aluminum is the best all-around robot-building material, especially for medium and larger machines. It’s exceptionally strong for its weight. Aluminum is fairly easy to cut and drill using ordinary shop tools. There’s more on building robots with aluminum in Chapter 11, “Working with Metal.”
Aluminum. If you want to go metal, aluminum is the best all-around robot-building material, especially for medium and larger machines. It’s exceptionally strong for its weight. Aluminum is fairly easy to cut and drill using ordinary shop tools. There’s more on building robots with aluminum in Chapter 11, “Working with Metal.”
![]() Tin, iron, and brass. Tin and iron are common hardware metals that are used to make angle brackets and sheet metal (various thicknesses, from 1/32″ on up), and as nail plates for house framing. Cost: fairly cheap. See Chapter 13, “Assembly Techniques,” for ways to use common angle brackets in your robot construction plans.
Tin, iron, and brass. Tin and iron are common hardware metals that are used to make angle brackets and sheet metal (various thicknesses, from 1/32″ on up), and as nail plates for house framing. Cost: fairly cheap. See Chapter 13, “Assembly Techniques,” for ways to use common angle brackets in your robot construction plans.
![]() Steel. Although sometimes used in the structural frame of a robot because of its strength, steel (and its close cousin stainless steel) is difficult to cut and shape without special tools. Ideal for combat robots. As this book concentrates on small, lightweight, and easy-to-build tabletop bots, we’ll leave the discussion of steel at this.
Steel. Although sometimes used in the structural frame of a robot because of its strength, steel (and its close cousin stainless steel) is difficult to cut and shape without special tools. Ideal for combat robots. As this book concentrates on small, lightweight, and easy-to-build tabletop bots, we’ll leave the discussion of steel at this.
Locomotion Systems
Locomotion is how a mobile robot gets around. It performs this feat in a variety of ways, typically using wheels, tank tracks, and legs. In each case, the locomotion system is driven by a motor, which turns a shaft, cam, or lever.
WHEELS
Wheels are the most popular method for providing robots with mobility. There may be no animals on this earth that use wheels to get around, but for us robot builders it’s the simple and foolproof choice. Wheels, like those on the robot in Figure 2-10, can be just about any size, limited only by the dimensions of the robot and your outlandish imagination. Turtle-sized robots usually have small wheels, less than 2″ or 3″ in diameter. Medium-size rover-type robots use wheels with diameters up to 7″ or 8″. A few unusual designs call for bicycle wheels, which, despite their size, are lightweight but very sturdy.

Figure 2-10 Wheels are the most popular way to make a robot move. The size, shape, and even the location of the wheels can vary, though two wheels counterbalanced on one or both ends of the bot is the most common design. (Photo courtesy Parallax Inc.)
Robots can have just about any number of wheels, although two is the most common. The robot is balanced on the two wheels by one or two free-rolling casters, or perhaps even a third swivel wheel or nonmoving skid. Four-and six-wheel robots are also around. You can read more about wheel designs in Chapter 20, “Moving Your Robot,” and the many hands-on projects in Chapter 26, “Build Robots with Wheels and Tracks.”
TRACKS
The basic design of track-driven robots is pretty simple. Two tracks, one on each side of the robot, act as giant wheels. The tracks turn, and the robot lurches forward or backward. For most robots, each track is about as long as the robot itself.
Track drive (see Figure 2-11) is practical for many reasons, including the fact that it makes it possible to mow through all sorts of obstacles. Given the right track material, track drive provides excellent traction, even on slippery surfaces like snow, wet concrete, or a clean kitchen floor. See Chapter 26 for some affordable tracked robots you can build yourself.
LEGS
Of all types of mobile robots, those that walk on legs present the greatest challenges. But they’re also great conversation pieces! You must overcome many difficulties to design and construct a legged robot. First, there is the question of the number of legs and how the legs provide stability when the robot is in motion or when it’s standing still. Then there’s the question of how the legs propel the robot forward or backward, and—more difficult still!—the question of how to turn the robot so it can navigate a corner.
Your walking robots can have two or more legs. The fewer the legs, the more challenging the design. Two-legged (bipedal) robots use unique balancing methods to keep them from falling over. Four-legged robots (quadrupeds) are easier to balance, but good walking and steering can involve adding extra joints and some sophisticated math to make sure everything moves smoothly.
Robots with six legs (called hexapods) are able to walk at brisk speeds without falling and are more than capable of turning corners, bounding over uneven terrain, and making the neighborhood animals run for cover. As a result, the six-legged kind, like the one in Figure 2-12, are the most popular among robot makers. You can read about building your own leg-based robot in Chapter 27, “Build Robots with Legs.”

Figure 2-11 Tracks on a robot provide mobility on uneven or thick terrain like sand, grass, or rocks. Tracks may be made of rubber, plastic, or metal; the plastic ones are among the easiest to use and the least expensive.
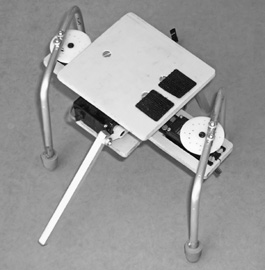
Figure 2-12 Legs allow a robot to navigate where wheels or tracks can’t. Plus they look cool. This design uses four motors and six legs. It walks by moving its legs in specific patterns.
Power Systems
We humans eat food that is then processed by our bodies to power muscles. While you could probably design a digestive system for a robot and feed it hamburgers, french fries, and other semi-radioactive foods, an easier way to generate the power to make your robot go is to take a trip to the store and buy a set of batteries. Connect the batteries to the robot’s motors, circuits, and other parts, and you’re all set.
TYPES OF BATTERIES
There are many kinds of batteries, and Chapter 18, “All About Batteries,” goes into more detail about which ones are best for robots. Here are a few quick details to start you off.
Batteries generate voltage and come in two distinct categories: rechargeable and nonre-chargeable. Nonrechargeable batteries include the standard zinc and alkaline cells you buy at the supermarket, but only the alkaline kind is truly useful in robotics.
Rechargeable batteries include nickel-cadmium (NiCd), nickel metal hydride (NiMH), sealed lead-acid cells, and special rechargeable alkaline. NiCd and NiMH batteries are popular choices because they are relatively easy to find, come in common sizes, and can be recharged many times using an inexpensive charger.
OTHER POWER SOURCES
Small robots can be powered by solar energy when they are equipped with suitable solar cells. Solar-powered robots can tap their motive energy directly from the cells, or the cells can charge up a battery over time. Solar-powered bots are a favorite of those in the BEAM camp—a type of robot design that stresses simplicity, including the power supply of the machine.
Hydraulic power uses oil or fluid pressure to move linkages. You’ve seen hydraulic power at work if you’ve ever watched a bulldozer move dirt from pile to pile. And while you drive, you use it every day when you press down on the brake pedal. Similarly, pneumatic power uses air pressure to move linkages. Pneumatic systems are cleaner than hydraulic systems, but, all things considered, they aren’t as powerful.
Both hydraulic and pneumatic systems must be pressurized to work, and this is commonly done using a pump that’s driven by an electric or gas motor. Hydraulic and pneumatic systems are harder and more expensive to implement, but they provide an extra measure of power. With a few hundred dollars in surplus pneumatic cylinders, hoses, fittings, and other parts, you could conceivably build a hobby robot that picks up chairs, bicycles, even people!
These alternative power sources aren’t covered here, but if you’re interested, check out the local library for books on solar, hydraulic, and pneumatic systems.
Sensing Devices
Imagine a world without sight, sound, touch, smell, or taste. Without these senses, we’d be nothing more than an inanimate machine, like the family car, the living room television, or that guy who hosts the Channel 5 late-night movie. Our senses are an integral part of our lives.
The more senses a robot has, the more it can interact with its environment. That’s important for the robot to go about its business on its own. Figure 2-13 shows how sensors form an integral part of the robot.
TOUCH
The sense of touch is provided by mounting switches to the robot’s frame, so that it can detect when it’s run into something—or something has run into it. Another way to register touch is with a pressure sensor, which detects when a certain amount of force is exerted on it. You can build your own inexpensive pressure sensors or buy them ready-made for a few dollars. See Chapter 42, “Adding the Sense of Touch,” for details.
LIGHT AND SOUND
It’s easy to make a robot sensitive to light; in fact, these are among the least-expensive sensors you can add to a robot. Chapter 44, “Robotic Eyes,” provides a number of plans for giving sight to a robot. You can even connect a video camera and beam the picture from your spybot to another room.
You can use light as a way to remotely communicate with your robot. Using a standard infrared remote control, you can program your robot to watch for the special coded signals that happen each time you press a button.
The same goes for sensitivity to sound. Sound is easy to detect. Find out more in Chapter 46, “Making and Listening to Sound.”
SMELL AND TASTE
With some fairly inexpensive sensors, you can equip your bot to effectively smell for dangerous toxic gas, sniff around for smoke, sound the alarm if it detects the flame of a fire, or hit the panic button if things get too hot. See Chapter 48, “Danger, Will Robinson!,” for some ideas and hands-on projects on sensing fire, heat, flame, and gas.

Figure 2-13 Sensors let your robot experience the world around it. Humans may perceive their environment using eyesight and hearing, but most robots use simpler technologies like ultrasonic and infrared distance measuring or light, sound, and touch. The sensors are integrated and processed by a control circuit, which then performs some action based on the sensory input.
A SIXTH SENSE OF THINGS NEARBY
Humans use an elaborate system of sight, sound, and other senses to determine when something is close by. For robots, there are whole families of cheap sensors that do the same thing and are very easy to implement.
One type uses ultrasound, just like a bat. The sensor emits a short ping—similar to the sonar of a submarine—then waits for its echo. The time it takes between sending the ping and getting the return echo tells the sensor how far away something is. Sounds complicated, but the whole thing now comes prepackaged in a small device that costs less than $20.
Another scheme uses invisible infrared light and a bit of mathematics to measure distances. The system is more fully explained in Chapter 43, “Proximity and Distance Sensing,” but suffice it to say, these sensors are even smaller and less expensive than ultrasonic detectors.
TILT, MOTION, AND POSITION
Rounding out the sensory systems of today’s amateur robot are things like accelerometers for detecting tilt and motion, gyroscopes for determining speed, and global positioning satellite receivers for checking where on this earth your robot currently is. Read more on these and other cool devices in Chapter 45, “Navigating Your Robot.”
Output Devices
Output devices are components that relay information from the robot to the outside world. Here are examples of output devices in robots:
![]() Light-emitting diodes (LEDs) that shine or blink, to indicate what the robot is doing—or trying to do.
Light-emitting diodes (LEDs) that shine or blink, to indicate what the robot is doing—or trying to do.
![]() Liquid-crystal displays (LCDs), for showing complete messages.
Liquid-crystal displays (LCDs), for showing complete messages.
![]() Sounds that allow your bot to communicate in nonvisual ways. You might add a speech synthesizer so your robot can talk to you. Or program it to wake you up in the morning by playing your favorite MP3s. You can record any sound and have your robot reproduce it instantly.
Sounds that allow your bot to communicate in nonvisual ways. You might add a speech synthesizer so your robot can talk to you. Or program it to wake you up in the morning by playing your favorite MP3s. You can record any sound and have your robot reproduce it instantly.
Read more on these and other ideas in Chapter 46, “Making and Listening to Sound,” and Chapter 47, “Interacting with Your Creation.”
Where the Word “Robot” Comes From
I close this chapter with a wee bit of pontification: where does the term robot come from, and what does it mean to the average robot enthusiast?

Figure 2-14 Robots are made for the drudgery of everyday work. In Czech, Slovak, and Polish languages, the word robota (from which robot is derived) means “work.” (Rendering courtesy Christopher Schantz.)
The term robota, from which the common word robot is derived, was first coined by Czech novelist and playwright Karel Capek. He used it first in a short story and then again in a now-classic play titled R.U.R.—which stands for “Rossum’s Universal Robots.”
The play was first produced onstage in 1921 and is one of many written by Capek that have a dystopian theme—a utopia gone wrong. The basic premise of the play’s “perfect society” is that the society is fatally flawed. In R.U.R. the robots are created by humans to take over all labor, including working on farms and in factories. Eventually the automatons conspire against their flesh-and-bone masters and rise up to kill them.
The term robota means “work” or “servitude”—like the poor mechanical dude in Figure 2-14, spending its days outdoors, sweeping up other people’s messes. It is the work aspect of robotics that is often forgotten, but it defines a “robot” more than anything else.
The work doesn’t have to be complicated. It can be something as simple as a robot that patrols the living room looking for signs of warm-blooded creatures and, when it finds one, sounds off a shrill siren alarm. Annoying, yes, but a robot nonetheless!
Many of us get caught up in trying to make our robot creations do serious work around the house—vacuum the carpet maybe, get a soda can from the refrigerator, or collect dirty socks from the floor. Noble aims, to be sure, but it’s perfectly acceptable to build a robot that’s merely for fun. Build it to amuse you and your family.
Or play tricks with the cat.