
Once you have a complete map or something acceptable, you can save it to use it later in the navigation stack. To save it, use the following command:
$ rosrun map_server map_saver -f map
This command would give the following result:

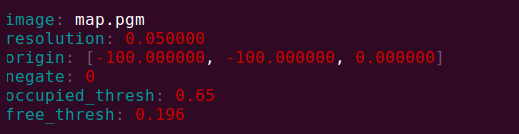
This command will create two files, map.pgm and map.yaml. The first one is the map in the .pgm format (the portable gray map format). The other is the configuration file for the map. If you open it, you will see the following output:
Now, open the .pgm image file with your favorite viewer, and you will see the map being built before you:
