
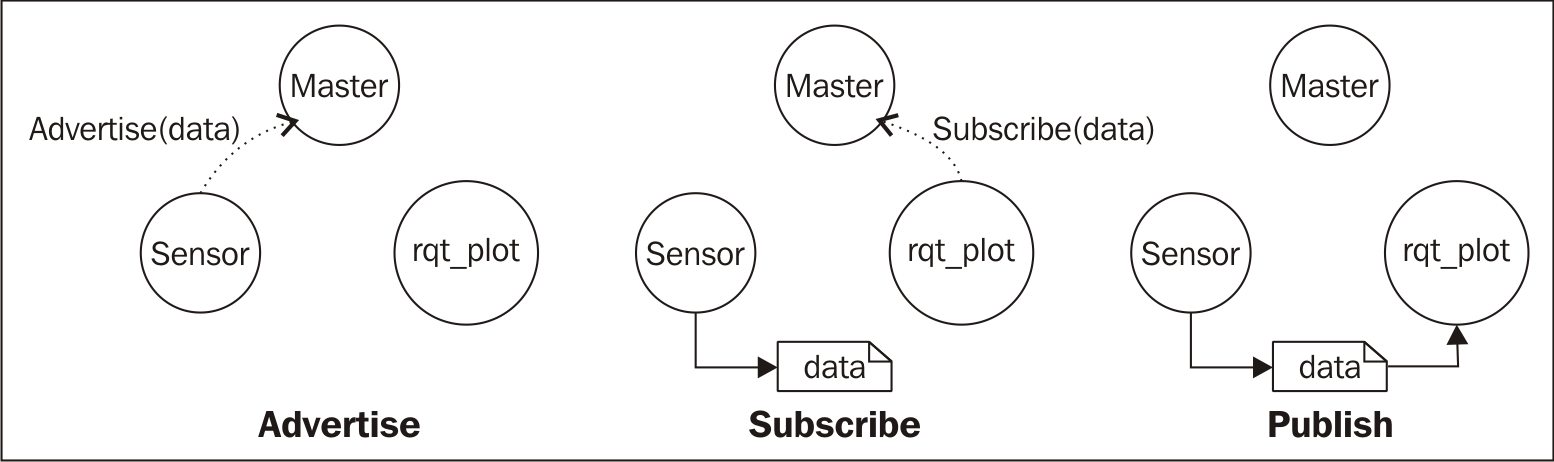
The ROS master provides naming and registration services to the rest of the nodes in the ROS system. It tracks publishers and subscribers to topics as well as services. The role of the master is to enable individual ROS nodes to locate one another.
Once these nodes have located each other, they communicate with each other in a peer-to-peer fashion. You can see in a graphic example the steps performed in ROS to advertise a topic, subscribe to a topic, and publish a message, in the following diagram:
The master also provides Parameter Server. The master is most commonly run using the roscore command, which loads the ROS master, along with other essential components.