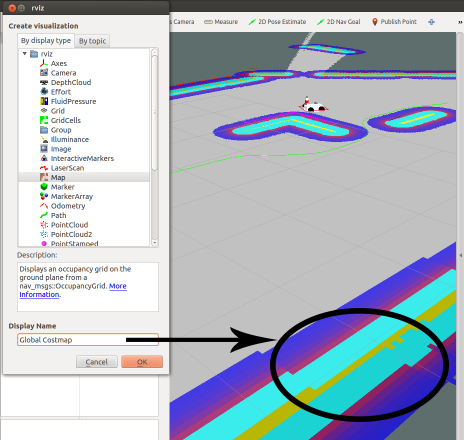
This shows the global costmap that the navigation stack uses for navigation.The yellow line is the detected obstacle. For the robot to avoid collision, the robot's footprint should never intersect with a cell that contains an obstacle. The blue zone is the inflated obstacle. To avoid collisions, the center point of the robot should never overlap with a cell that contains an inflated obstacle:
- Topic: /move_base/global_costmap/costmap
- Type: nav_msgs/OccupancyGrid