The architecture of MoveIt! is depicted in the following diagram taken from the concepts sections of its official documentation at http://moveit.ros.org/documentation/concepts/. Here, we describe the main concepts in brief.
In order to install MoveIt!, you only have to run this command:
$ sudo apt-get install ros-kinetic-moveit-full
Alternatively, you can install all the dependencies of the code that comes with this chapter by running the following command from a workspace that contains it:
$ rosdep install --from-paths src -iy
The following diagram shows the architecture of MoveIt!:
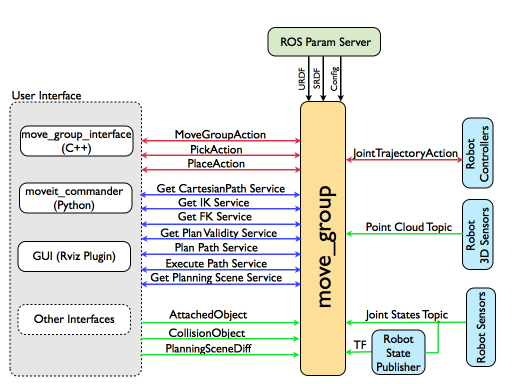
In the center of the architecture, we have the move_group element. The main idea is that we have to define groups of joints and other elements to perform moving actions using motion planning algorithms. These algorithms consider a scene with objects to interact with and the joints characteristics of the group.
A group is defined using standard ROS tools and definition languages, such as YAML, URDF, and SDF. In brief, we have to define the joints that are part of a group with their joint limits. Similarly, we define the end effector tools, such as a gripper and perception sensors. The robot must expose JointTrajectoryAction controllers so that the output of the motion planning can be planned and executed on the robot hardware (or simulator). In order to monitor the execution, /joint_states is also needed by means of the robot state publisher. All this is provided by the ROS control as well as specific sensor drivers. Note that MoveIt! provides a GUI wizard to define the joint groups for a given robot that can be called directly as follows:
$ roslaunch moveit_setup_assistant setup_assistant.launch
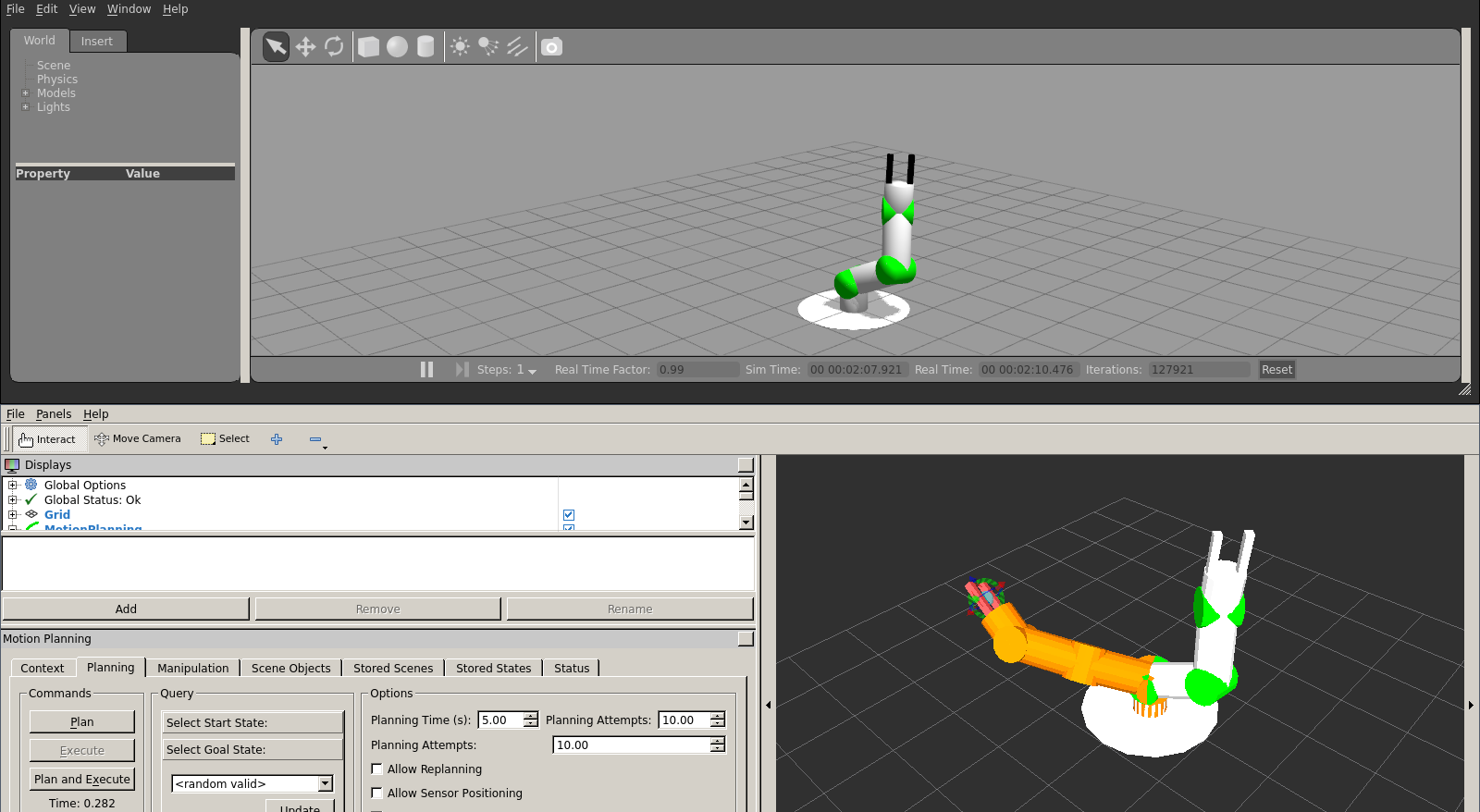
Once move_group is configured properly, we can interface with it. MoveIt! provides a C++ and a Python API to do so, as well as an RViz plugin that integrates seamlessly and allows us to send motion goals, plan them, and send (execute) them on the robot, as shown in the following figure: